面向对象的城镇水体信息提取技术研究
2016-12-27于桓飞田文婷王学强
于桓飞,田文婷,王 新,王学强
(浙江省水利河口研究院,浙江 杭州 310020)
面向对象的城镇水体信息提取技术研究
于桓飞,田文婷,王 新,王学强
(浙江省水利河口研究院,浙江 杭州 310020)
利用面向对象方法对城镇水体信息进行提取,选取平湖市主城区作为研究区域,Pléiades遥感影像为数据源,通过综合考虑几何差异和代数差异的方法确定了水体最优分割参数,选用伪归一化水体指数初步进行水体信息提取.考虑建筑物和阴影的空间关系,剔除建筑物阴影对水体信息的干扰,对水体信息提取结果进行优化.通过该方法水体提取精度为92.27%,总体提取精度较高.实验结果表明,该方法可以完整、快速的提取出城镇中的水体信息.
城镇水体;Pléiades影像;面向对象;空间关系
我国东部平原区河网密布,但近几十年来,随着经济的快速发展和城市化进程的加快,城镇周边河流破坏较严重,河流蓄泄功能逐年降低[1],水域侵占现象逐渐严重.利用遥感技术,可以及时、快速、准确地监测各类地表水体情况,为水资源调查、流域综合治理、水利规划等提供基础数据和决策依据[2].
高分辨率遥感影像中水体光谱、纹理等细节表虽然比较详细,但其高分辨率影像中水体提取也容易受建筑物、阴影等影响.针对这些问题,Mc Feeters[3]提出归一化差异水体指数(NDWI),利用水体的光谱特征突出水体信息,同时抑制其他地物信息.邓劲松[4]等利用决策树方法,通过比较水体与其他主要地物的光谱特性,探讨了它们在光谱上的可分性,实现了水体的自动提取.此外,许多研究人员还利用波段阈值、波段组合[5-6]关系等进行水体信息提取,并取得一定成果,但遥感图像中难免存在“异物同谱”、“同物异谱”现象,因此只依靠光谱特征容易导致很多错分与漏分[7],而且传统的基于像元的方法很少考虑地物的形状、几何结构等信息.利用面向对象方法可以更好地提取高分辨率影像的丰富信息,其主要思想是图像分割,该方法的操作对象是经过分割生成的影像单元[8],从影像中提取出区域对象的综合信息(形状、纹理、光谱特性、与邻近像元、子对象等相关特性)然后综合运用多种特征进行分类,从而提高分类精度.
1 面向对象的信息提取
面向对象的信息提取,其操作对象不是单个像元,而是经过图像分割后形成的具有多种语义特征及关系特征的对象,该对象比单个像元更具实际意义.本研究中数据处理主要是基于eCognition软件完成,利用该软件进行信息提取包括两个关键步骤:图像分割和面向对象分类.
1.1 图像分割
图像分割,基于一定的分割图像算法,依据地物光谱、纹理等信息将图像分割成一定的影像对象[9].本文基于eCognition软件进行图像分割,其提供多种图像分割方法,包括多尺度分割、棋盘分割等.本文选择自下而上的多尺度分割法,该方法将每个像元作为一个种子点,然后根据异质性最小(同质性最大)标准,把相邻的特征相似的像元或对象进行合并,最终分割结果能符合地理实体在现实中的表现.这里异质性主要考虑形状异质性和光谱异质性,图像分割首先要确定光谱因子和形状因子的权重[10],然后确定图像分割尺度,分割尺度的选择很重要,分割尺度过大会导致地物分割不完全,分割尺度过小会导致地物破碎.因此图像分割最主要是确定几个分割参数.
目前对于分割结果是否符合分类要求尚没有一个广泛认可的标准,一般认为最优分割参数是分割后的多边形与参照地物的边界吻合较好,既不破碎也不过于综合[11],分割结果评价方法主要有:优度法和差异性法.差异性法是通过反映影像分割对象与理想分割对象之间的差异,更符合人类认知的过程,同时该方法可操作性更好,所以本文分割质量评价采用差异性方法.该方法第一步是寻找与参考对象相匹配的分割对象,分割结果中所有分割对象是相邻无空隙的分布于整个研究区,而参考数据中的对象样本是离散的分布于研究区内,因此需要从众多分割对象中找出与参考对象所对应的数据,称为匹配对象;参考多边形与匹配多边形进行对比分析,确定两多边形的差异程度.该差异包括几何差异和代数差异[12],代数差异是指两种多边形数据集在数量上的差异,几何差异是指两者在面积上的差异.不同的分割数据集产生不同的分割对象,逐一与参考对象比较确定最小差异值,其对应的分割参数就是最优分割参数.
1.2 图像分类
本文图像分类方法选用建立规则集分类方法,建立规则集方法可以人为地针对每一类型分别选择特征,也可以分层次逐步对影像进行分类.当两种类型之间的特征差异较大时可以采用阈值法加以区分,当两者差异不明显甚至相似有重叠时,可以对多个特征设置隶属度函数进行区分,面向对象方法提供多种地物特征,光谱特征指地物不同波段反射值以及衍生值;形状特征指与形状相关的指数,包括长度、面积、长宽比等;其他还包括地物纹理特征、色彩空间特征等.因此建立规则集首先是从众多特征中筛选出适合某一类地物的特征.
图像分类的另一关键是确定隶属度函数,其原理是计算不同地物在某一特征中的特征值,然后选择隶属度函数,将其归属到[0~1]的隶属度,当地物分类需要不同特征时,可以通过并、或、非等关系进行组合[13].最后根据各个类别的隶属度值来判别最终属于哪一类.该方法同时考虑多个特征并设置隶属度,综合多种特征的隶属度值对对象进行判别,能有效提高分类精度.
(1)光谱特征分析
比较水体与其他地物光谱曲线,发现水体在所有波段反射率都较低,反射率都小于10%,远低于大多数的其他地物.干净水体在蓝绿波段反射率较高,反射率在4%~5%之间.在其他可见光波段吸收都很强,到近红外波段反射率迅速下降为零.城镇水体由于受泥沙、污染物等的影响,水体光谱曲线有一定变化,总体表现为反射率增加,并且光谱曲线的反射峰也会向长波段移动.分析水体在不同波段的反射特性,同时分析比较其他地物光谱反射特性,Mefeeters提出了归一化差异水体指数(NDWI),该指数使用了近红外波段和绿波段,由于植被在两个波段的反射特性与水体相反,所以使用该指数可以有效剔除植被信息,突出水体信息.但利用该指数提取城镇水体时,会有大量建筑物信息干扰,导致提取结果不理想.之后周艺[14]等根据建筑物反射特性,对NDWI进行改进提出了伪归一化差异水体指数(FNDWI).利用该指数可以有效避免建筑物对水体信息提取干扰.该指数计算公式为:
FGreen=Green+S(CNIR-NIR)
(1)
(2)
式中,NIR—近红外波段;Green—绿波段;
浙江省新一代海洋预报业务平台采用面向服务(Service Oriented Architecture,SOA)和多层体系的结构,这种框架结构属于开放式、松耦合的服务结构,使得平台中各部件的连接更加灵活,有利于平台随着海洋气象业务发展变动而迅速更新。整个平台框架如图1所示。
S—参数,代表修正的幅度;
CNIR—参数,代表近红外波段上对水体和城镇建筑用地的倾向性界定阈值.
(2)形状特征
在高分辨率影像中,不同地物都有其独特的形状特征.在面向对象的分类方法中,可以确定不同对象的形状特征,这是影像分类中一个重要的信息.根据这些形状特征可以有效区分目标地物与其他地物.本文中涉及的形状特性如下:
①长宽比.对于线状地物,其主要形状特性为影像对象的长宽比.通过比较不同地物的长宽比确定阈值,可有效提取线状地物.计算长宽比主要利用影像对象的外接矩形.其主要表示方法如下:

(3)
式中:A—影像对象的面积;
a—影像对象外接矩形的长度;
b—影像对象外接矩形的宽度;
f—影像对象外接矩形的填充度(影像对象的面积A除外接矩形的总面积b×a).
②形状指数.在数学上,形状指数是影像对象边界长度除以它面积平方根的四倍,使用该指数可以确定对象的光滑度,计算指数越大,对象越破碎.

(4)
式中:A—影像对象的面积;P—对象的边界长度.
(3)空间关系
空间关系用于描述不同对象之间的空间位置关系,实际生活中我们描述道路在河流左边、右边,以及前、后、东、南、西、北等空间关系都属于顺序关系,它是对空间对象的某种排序.另一种空间关系是用一定的空间度量去描述不同对象间的关系,如两对象之间的距离或亲疏程度,这种空间关系称为度量关系.最后一种空间关系称为拓扑关系,用于描述不同空间对象之间连接、相邻关系等.空间对象的几何特征会决定其空间关系,它表达了空间对象之间的一种约束[15].
描述空间关系首先在影像中找出地物间的空间关系,并利用对象提供的信息建立规则[16].在面向对象信息提取中,地物间的空间关系可以利用影像的语义信息进行描述.eCognition中提供了类相关特性,描述了一个对象与其他指定对象的空间关系,其他影像对象可以在与该影像对象相同的影像对象层,也可以是在影像对象层次结构中较低(下层影像层)或较高(上层影像层)的影像对象层.在eCognition中其对应的类相关特性分别为:Relations to Neighbor Objects用来描述一个影像对象与它旁边的其他影像对象的关系,Relations to Sub-Objects用来描述一个影像对象与子对象的关系,Relations to Superobjects用来描述一个影像对象与父对象的关系.
2 实验区概况和数据预处理
2.1 实验区概况
平湖市位于浙江省嘉兴市,属于嘉兴市辖区之一,南临杭州湾,东临山海市.地理坐标介于北纬30°35′~30°52′和东经120°57′~121°16′之间.区域陆域面积537 km2,海域面积1 086 km2.境内水域众多,分布大量河流、湖泊.本文以平湖市主城区为研究区域(见图1),区域内水体包括东市河、南市河、海盐塘、东湖等.整个研究区包括了典型水体和细小河流,区域内还包括道路、植被、建筑物等其他地物,具有研究的典型性.

图1 实验区遥感影像
2.2 数据预处理
Pléiades卫星星座由两颗完全相同的卫星组成,Pléiades 1在2011年12月17日成功发射,Pléiades 2在2012年12月1日开始获取影像.两颗卫星配合可以满足全球所有地区卫星重返周期为一天,可大大提高影像时间分辨率.本文数据源为Pléiades 1影像数据,影像获取时间为2013年3月21日,使用的波段主要是2 m分辨率的多光谱,波段范围:蓝(0.45~0.52 μm)、绿(0.52~0.59 μm)、红(0.63~0.69 μm)、近红外NIR(0.77~0.89 μm).影像获取后首先进行预处理,包括几何位置校正、坐标系统转化、图像拼接裁剪、数据格式转化等.
3 实验与结果分析
(1)建立规则集
为了便于提取水体信息,首先要了解水体的遥感信息特性,从波谱曲线来看,水体与影像上其他类型地物的光谱差异性较大,利用多个波段组合运算确定阈值可以有效区分水体与其他地物.针对城镇水体特征,本文选用伪归一化水体指数(FNDWI)进行水体提取,提取结果发现水体中会混合阴影.分析阴影与水体的光谱反射特性,发现两者光谱反射特性极为相似,因此只考虑光谱特性无法将阴影与水体区分,需要加入其它地物特性,本文选用空间关系.研究区主要位于平湖主城区,区域内阴影主要由建筑物造成,在高分辨率影像中阴影与建筑物是相互邻接的,两个对象具有公共边,这是阴影提取中很重要的空间关系.因此本文首先提取区域内建筑物,根据建筑物与阴影的空间关系,剔除水体中的阴影.根据以上分析建立水体提取规则集:①利用FNDWI区分水体和其他地物,此时提取的水体中会混杂有阴影;同时利用植被指数将植被信息提取出来.②利用光谱信息和形状特性,在未分类区域提取出建筑物信息.③根据建筑物与阴影的空间关系,将水体中阴影剔除.
(2)图像分割
利用多尺度分割算法对实验区影像进行分割,确定区域最优分割参数.首先利用数字化的方法获取水体参考数据集,其中参考多边形在影像中要分布均匀同时兼顾多边形大小,保证参考多边形的选择满足典型性.考虑各个波段的重要性,设置各个波段的权重为1;然后设置分割尺度、形状因子和紧密度因子的阈值分别为[20~80]、[0.1~0.9]、[0.1~0.9],步长分别为1、0.1、0.1,利用程序将其排列组合,对影像进行分割,每次分割结果与参考数据集叠加分析,最终确定最优分割参数集:分割尺度46、形状因子0.3、紧密度因子0.5.影像分割局部放大图(见图2).由图2(a)可以看出分割对象边缘与水体边缘的吻合度较高,虽然水体被分割为几个对象,但是同一对象中没有不同的地物,保证了水体与其他地物被完全分离.从图中发现房屋分割不理想,出现房屋与道路分割为一个对象的情况,为了准确提取建筑物信息,确定建筑物的最优分割参数集:分割尺度31、形状因子0.3、紧密度因子0.5,这时建筑物信息被完整分割出来(见图2(b)).
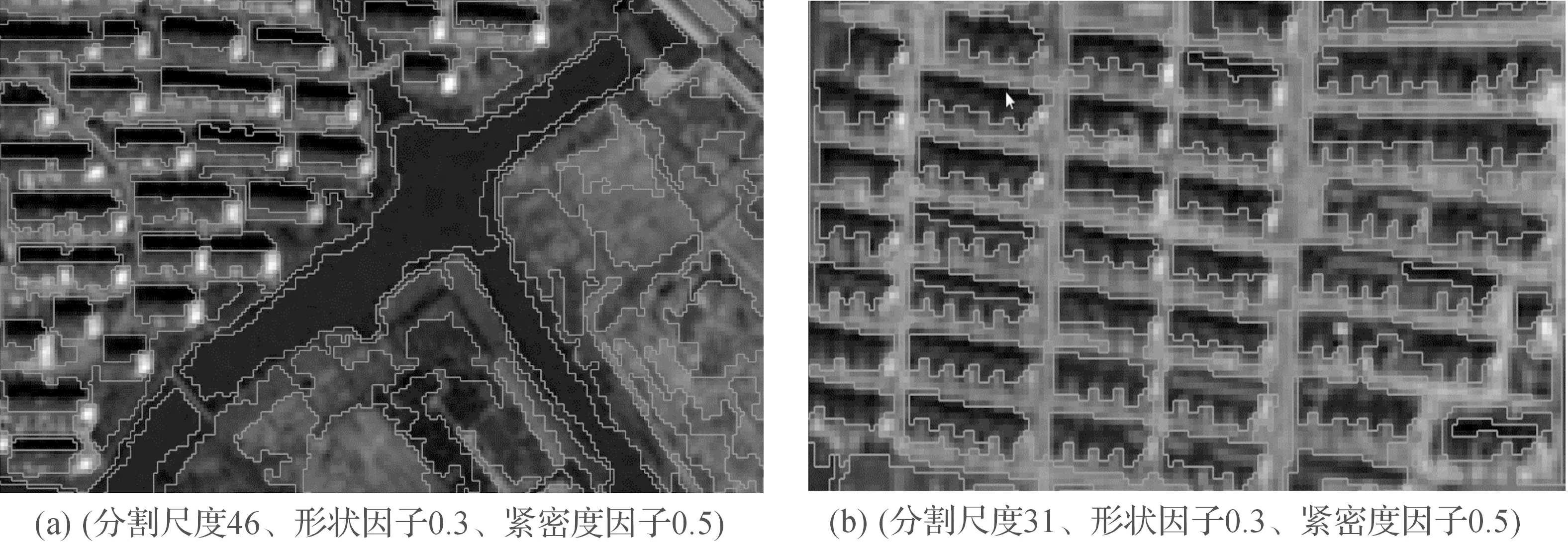
图2 影像分割局部放大图
(3)图像分类
利用软件自定义参数功能计算FNDWI、NDVI等参数,分别选取水体和其他地物样本,统计其在各个特征值上的最大最少值,经过反复研究和比较,确定各个经验阈值.
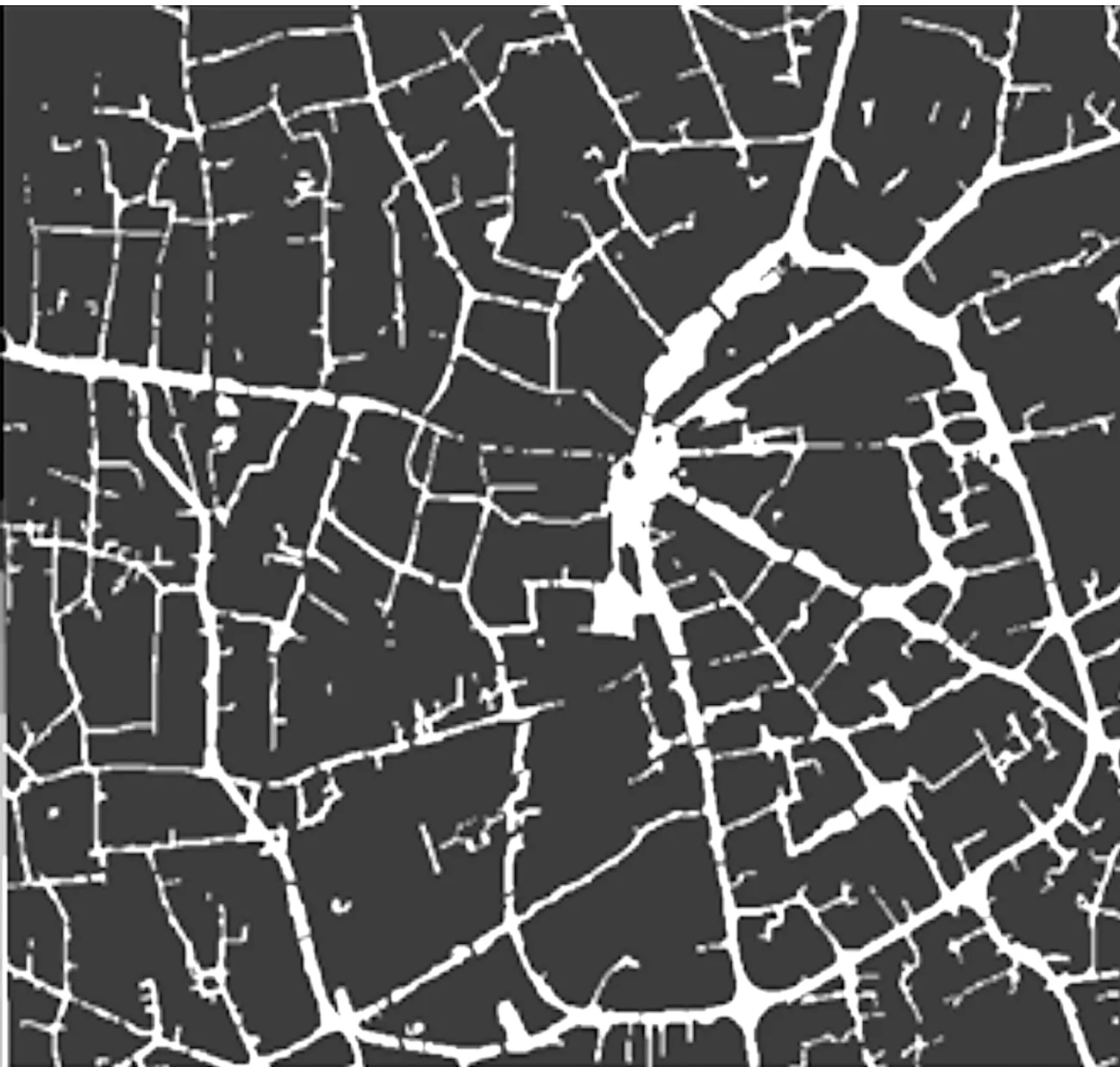
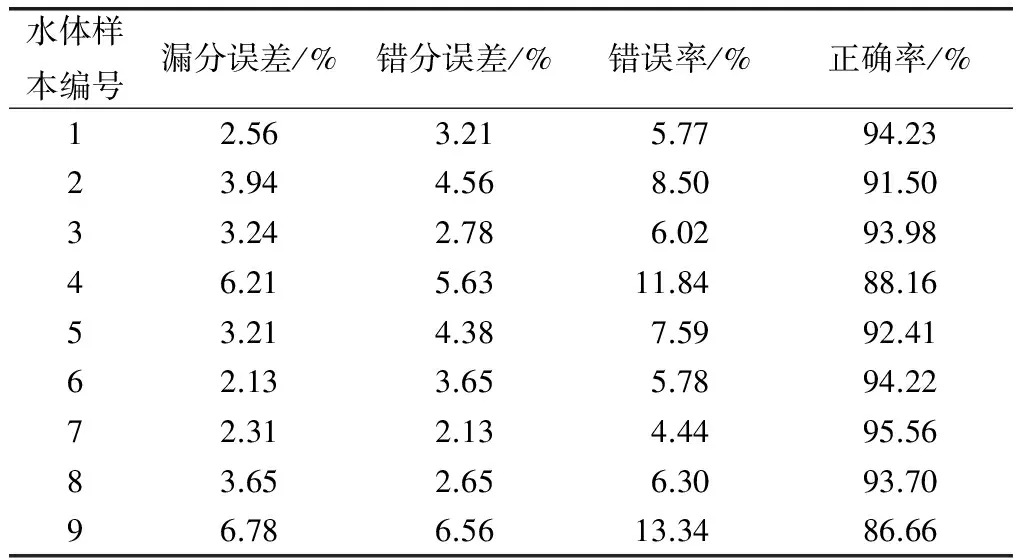
根据水体特性确定FNDWI>0.05,将满足条件的对象全部提取出来,从图3可以看出:①水体信息被全部提取出来,但同时也掺杂了大量建筑物阴影.②提取植被信息主要是利用NDVI,根据分析确定阈值为NDVI>0.13.③提取建筑物信息,对已经识别区域进行掩膜,剩余未分类区域再次进行分割(分割数据集:分割尺度31、形状因子0.3、紧密度因子0.5).从光谱特性来看道路和建筑物非常相似,因此区分二者需要加入其它分类特性.从形状上比较,道路一般呈细长条,建筑物一般为矩形.本文最终选取近红波段、length/width、shape index特征构建隶属度函数,设置138 图3 水体信息初步提取结果 分析建筑物阴影不同于水体的几何特征和空间关系:①建筑物阴影与建筑物是邻接关系,两者具有较大的公共边长.②建筑物阴影呈带状,几何形态与建筑物类似,具有一定的长宽和面积,但面积远小于城市水体面积.③建筑物背向光源的地方才会出现阴影,在中国阴影出现在建筑物之北.考虑建筑物与阴影的邻接关系,同时对象位于同一个影像层中,因此空间关系描述选用Relations to Neighbor Objects-Rel.border to.在已分类的水体中使用Rel.border to>45%,可以成功将建筑物阴影剔除,最终水体信息提取结果(见图4). 图4 水系信息提取结果 (4)结果验证 为了定量评价结果,在实验区挑选样本,对照高清遥感影像进行人工目视解译,以目视解译结果作为参考评价水体提取结果,精度评价指数包括漏分误差、错分误差、错误率、准确率. 根据统计结果分析,水体提取精度:正确率最高为95.56%,最差为86.66%,正确率平均为92.27%,总体提取精度较高.通过比较发现,正确率较低主要是发生在细小河流上,当细小河流周围分布绿色植被时,由于周围地物影响,水体光谱信息发生较大变化,导致分类精度较低. 表1 水体提取精度列表 本文信息提取不仅利用地物光谱特征,还考虑了形状信息、空间关系等特征.影像中地物具有丰富的空间关系,本文在水体信息提取中利用了阴影与建筑物的空间关系,有效剔除水体中混杂阴影,提取出的图斑没有椒盐现象,最后结合少量人工干预,可以快速准确获取区域水体信息.与传统像元级水体提取方法比较,面向对象方法在效率、精度、自动化程度方面都体现了极大的优越性. [1] 王柳艳,许有鹏,余铭婧.城镇化对太湖平原河网的影响—以太湖流域武澄锡虞区为例[J].长江流域资源与环境,2013(2):151-156. [2] 钟 沛.卫星遥感数据在流域数字化中的应用[J].浙江水利水电专科学校学报,2002,14(2):1-2. [3] MCFEETERSS S K. The Use of Normalized Difference Water Index (NDWI) in the Delineation of Open Water Features [J].International Journal of Remote Sensing,1996,17(7):1425-1432. [4] 邓劲松,王 珂,李 君,等.决策树方法从SPOT-5卫星影像中自动提取水体信息研究[J].浙江大学学报(农业与生命科学版),2005,31(2):171-174. [5] 沈占锋,夏列钢,李均力,等.采用高斯归一化水体指数实现遥感影像河流的精确提取[J].中国图象图形学报,2013,18(4):421-428. [6] OUMA Y O,TATEISHI R. A Water Index for Rapid Mapping of Shoreline Changes of Five East African Rift Valley Lakes: An Empirical Analysis Using LANDSAT TM and ETM+Data[J].International Journal of Remote Sensing,2006,27(15):3153-3181. [7] 沈金祥,杨 辽,陈 曦,等.面向对象的山区湖泊信息自动提取方法[J].国土资源遥感,2012(3):84-91. [8] 肖 奥,赵文吉.基于最小异质性区域生长法的多尺度城市地物影像分割[J].首都师范大学学报(自然科学版),2010,31(1):60-64. [9] 任 毅.面向地理国情监测的道路和水系信息提取与分析[D].重庆:重庆交通大学,2014. [10] URSULA C. BENZ,PETER HOFMANN,GREGOR WILLHAUCK,etc. Multi-resolution,Object-oriented Fuzzy Analysis of Remote Sensing Data for GIS-ready Information [J]. ISPRS Journal of Photogrammetry and Remote Sensing,2004(58):239-258. [11] 黄慧萍.面向对象影像分析中的尺度问题研究[D].北京:北京中国科学院研究生院(遥感应用研究所),2003. [12] YONG LIU,LING BIAN,YUHONG MENG,etc. Discrepancy Measures for Selecting Optimal Combination of Parameter Values in Object-based Image Analysis [J]. ISPRS Journal of Photogrammetry and Remote Sensing,2012(68):144-156. [13] 郭钇宏.中卫南部环香山地区砂田分布及时空动态变化分析[D].兰州:兰州大学,2014. [14] 周 艺,谢光磊,王世新,等.利用伪归一化差异水体指数提取城镇周边细小河流信息[J].地球信息科学学报,2014,16(1):102-107. [15] 曹 菡,陈 军.方向关系与距离关系的定性描述与推理[J].西安石油学院学报(自然科学版),2001,16(1):68-72. [16] 周军其,李志娟.空间关系辅助的面向对象建筑物提取[J].应用科学学报,2012,30(5):511-516. ExtractionofWaterInformationinUrbanAreasbyObject-orientedMethod YU Huan-fei,TIAN Wen-ting,WANG Xin,WANG Xue-qiang (Zhejiang Institute of Hydraulics and Estuary,Hangzhou 310020,China) The urban water bodies were extracted based on object-oriented method and Pléiades remote sensing,and the main city zone of Pinghu was taken as the study area. The optimal segmentation parameter was calculated considering the geometric difference and algebraic difference; the water bodies were extracted initially by FNDWI. Considering the spatial relationship between building and its shadow,the shadow interference on water information was excluded to optimize the result. The overall accuracy of water extraction was 92.27%. The experimental result proved it as a complete and rapid extraction of the urban water bodies. urban water bodies; Pléiades remote sensing; object-oriented; spatial relationship 2016-05-23 2013年度浙江省省属科研院所专项计划项目(2013F10049);2014年度浙江省创新平台建设项目(2014F10035) 于桓飞(1969-),男,浙江浦江人,工程师,主要从事水利工程监理工作. P237 A 1008-536X(2016)10-0074-06
4 结 论
