基于D-S证据理论的直接空冷凝汽器故障诊断方法研究
2016-12-25于兰
于 兰
(长春工程学院能源与动力工程学院)
基于D-S证据理论的直接空冷凝汽器故障诊断方法研究
于 兰*
(长春工程学院能源与动力工程学院)
提出一种基于Elman神经网络和RBF神经网络通过D-S证据理论融合的故障诊断方法,把该方法应用在直接空冷凝汽器的故障诊断中。首先对故障进行神经网络初步诊断,得到属于不同故障状态的隶属度,然后采用D-S证据理论融合的方法进行决策诊断,得到最终结果。研究了直接空冷凝汽器的故障特征提取、样本选择、诊断系统结构和学习算法,并通过诊断实例阐述了该方法的具体实现过程,验证了所提方法的可行性,结果表明:该方法适用于直接空冷凝汽器故障诊断,故障定位准确率高。
直接空冷凝汽器 故障诊断 Elman神经网络 RBF神经网络 D-S证据理论
电厂设备运行中快速、准确地进行故障诊断是事故后隔离故障元件、恢复系统正常运行的首要前提,具有重要意义。随着智能技术的不断深入和发展,数据融合作为智能信息处理领域的有力工具在故障诊断方面得到广泛应用[1,2]。基于决策级的信息融合模型算法主要有贝叶斯推理[3]、模糊积分[4]和D-S证据理论[5]。利用贝叶斯推理算法进行信息融合,通过最大后验概率估计值的计算进行故障识别,首先需要获得先验信息,且要求决策集合的元素相互独立,这在实际应用中很难满足条件[6]。采用模糊积分方法时模糊测度难以确定,虽然采用λ模糊测度的方法可以降低确定模糊测度的难度,但同时也减弱了模糊测度的表达能力[7]。D-S证据理论并不采用精确的概率建立信任函数,仅需满足贝叶斯推理最弱的条件,所以利用起来较为简单。与证据理论相结合的算法有:支持向量机、粗糙集理论、模糊集理论、遗传算法及神经网络等。笔者研究的直接空冷凝汽器的故障诊断采用D-S证据理论与神经网络相结合的方法。
目前,对凝汽器的故障诊断已经逐渐趋于成熟,但进行直接空冷凝汽器故障诊断的研究却不多。文献[8]用BP神经网络建立了直接空冷凝汽器背压、积灰、管束冻结的监测系统,未考虑真空系统不严密、热风回流及风机出力不足等故障,且BP网络有收敛速度慢,易陷入局部极小点等缺点。文献[9]用改进的BP网络对直接空冷凝汽器进行故障诊断,未考虑积灰和热风回流的故障,并且直接空冷凝汽器以空气作为冷却介质,管束破裂并不会导致凝结水和冷却水混合从而使电导率增大。文献[10]总结了较为完善的故障征兆集,并且基于遗传算法优化的BP神经网络对直接空冷凝汽器进行故障诊断,但是遗传算法没有利用系统中的反馈信息,往往导致无为的冗余迭代,求解速率低。
针对上述问题,笔者提出一种基于Elman网络和RBF网络通过D-S证据理论融合的故障诊断方法。在诊断过程中,首先建立直接空冷凝汽器的故障知识库,确定征兆表达方法,建立故障征兆集,然后训练神经网络对直接空冷凝汽器进行初步诊断,最后把初步诊断结果通过D-S证据理论融合得到最终的诊断结果。
1 直接空冷凝汽器故障综合诊断模型
在运用D-S证据理论解决故障诊断问题时,首先要构造出每次得到的所有证据对各命题的基本概率分配(BPA),获取过程通常是复杂且非线性的[11]。Elman网络和RBF网络具有很强的泛化能力,只要网络经过大量样本的学习,就能较好地描述这种复杂的非线性映射关系,由此可确定BPA。然后利用D-S证据理论将每条证据的BPA进行融合,得到最终的融合结果。图1为D-S证据理论故障诊断模型框图。
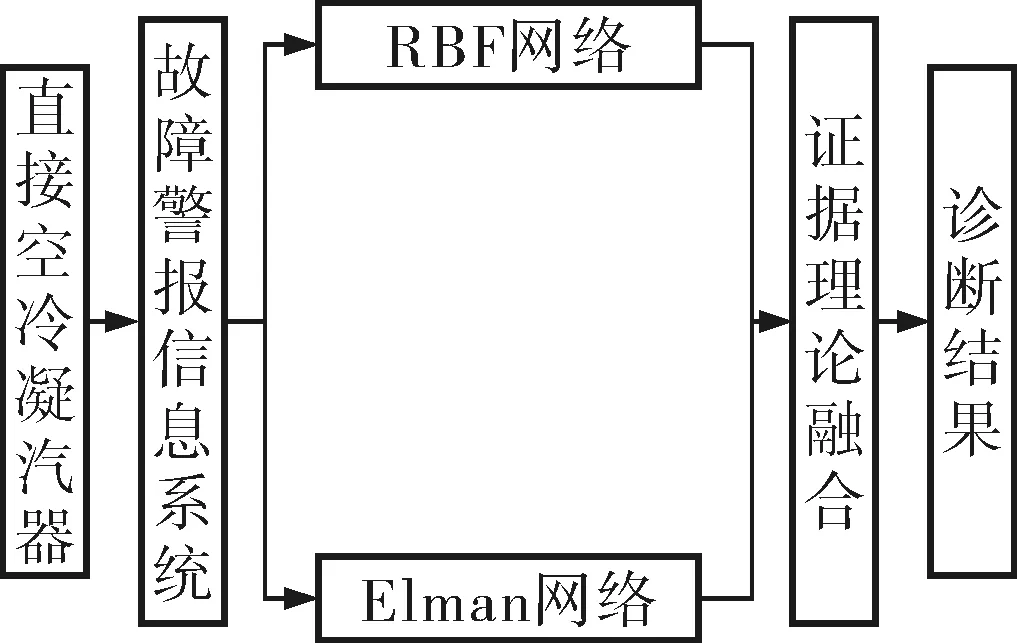
图1 D-S证据理论诊断模型框图
2 Elman神经网络
Elman网络是一种典型的局部回归网络,基本的Elman网络由输入层、隐含层、连接层和输出层组成(图2),与BP网络相比,在结构上多了一个连接层,用于构成局部反馈。连接层的传递函数为线性函数,但多了一个延迟单元,因此连接层可以记忆过去的状态,并在下一时刻与网络的输入一起作为隐含层的输入,使网络具有动态记忆功能[12]。Elman网络稳定性好,收敛速度快,在模式识别中优于BP网络。
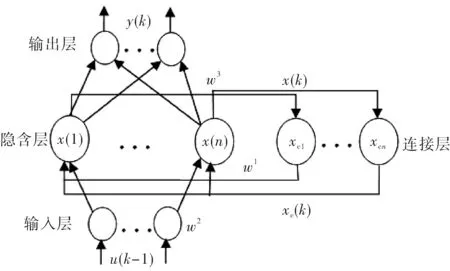
图2 Elman神经网络的拓扑结构
图2中,k表示时刻;u为l维输入向量;x为n维隐含层节点单元向量;xc为n维反馈状态向量;y为m维输出节点向量;w1、w2、w3分别表示连接层到隐含层、输入层到隐含层、隐含层到输出层的连接权值。网络描述为:
y(k)=g(w3x(k))
(1)
x(k)=f(w1xc(k))+w2(u(k-1)))
(2)
xc(k)=x(k-1)
(3)
式中f()——隐含层神经元的传递函数,常采用s型函数;
g()——输出神经元的传递函数,是隐含层输出的线性组合。
Elman网络采用BP算法进行权值修正,学习指标函数采用误差平方和函数:
(4)
3 RBF神经网络
RBF神经网络属于局部逼近网络,对于每个输入-输出数据对只有少量的连接权需要进行调整,具有学习速度快的优点,克服了BP神经网络存在的局部极小值和收敛速度慢的缺点,被广泛应用于故障诊断、预测及模式识别等学科领域[13,14],由输入层、隐含层和输出层组成(图3)。
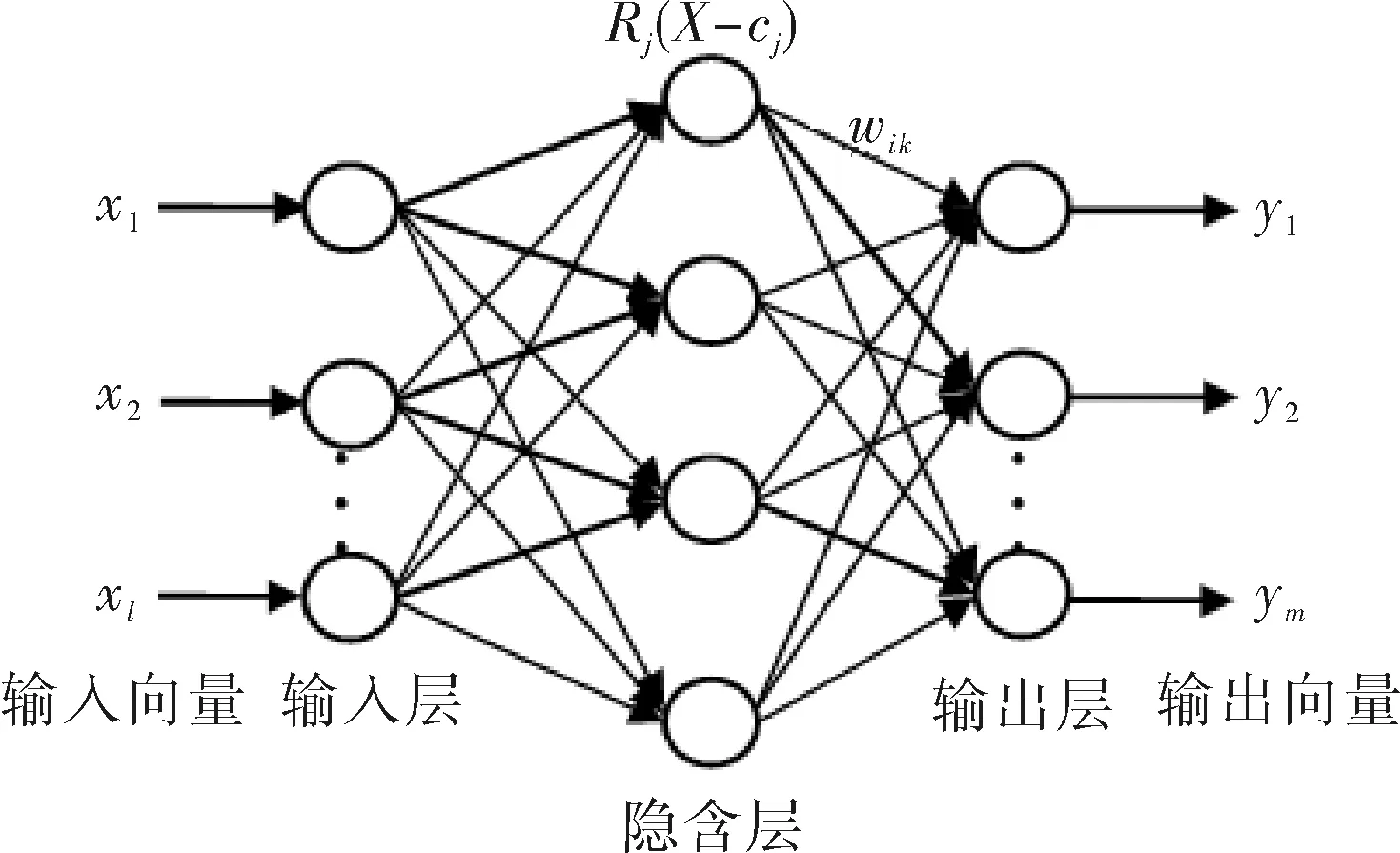
图3 RBF神经网络的拓扑结构
作为RBF神经网络的隐含层基函数,最常用的是高斯核函数:
(5)
式中cj——第j个基函数的中心;
n——隐含层神经元的个数;
X——l维输入向量,X=[x1,x2,…,xl];
σj——第j个神经元的标准化常数,即高斯基函数的方差。
RBF网络输入和输出之间的关系表达式为:
(6)
式中m——输出层神经元的个数;
wjk——隐含层第j个单元与输出层第k个单元之间的连接权值;
yk——输出层第k个神经元的输出值。
4 D-S证据理论
4.1基本概念
设D为样本空间,领域内的命题都用D的子集表示,BPA有3个定义。


定义3 似然函数定义为Pl:2D→[0,1],Pl(A)=1-Bel(~A),∀A⊆D,~A=D-A。Pl(A)又叫上限函数。
4.2融合规则
D-S证据理论的融合规则反映证据的连接功能,根据同样事情的不同证据,求出相同样本空间D的两个信任函数Bel1和Bel2,得到BPA为M1和M2。如果M1和M2相互独立,它们相应的信任函数Bel1和Bel2也相互独立。由M1和M2得到新的M=M1⊕M2,相应的信任函数可以通过相同的方法得到Bel=Bel1⊕Bel2[16]。
(7)
(8)
其中,A1,A2,…,An和B1,B2,…,Bn是变量,Ai⊆D,Bi⊆D,M1(Ai)>0,M2(Bj)>0。如果K≠1,则M是一个BPA;如果K=1,则正交矩阵M不存在,M1和M2不能融合。
5 故障样本的确定与综合诊断
5.1直接空冷凝汽器故障征兆提取
直接空冷凝汽器的故障类型需要根据具体的状态参数变化来判断,必须找出反映故障的主要参数才有助于进行故障诊断。直接空冷凝汽器与普通水冷凝汽器有相似的故障,但是它们在结构、换热面积及换热介质等方面存在显著不同。直接空冷凝汽器在运行时还会出现翅片管表面容易积灰、多变的环境风导致空冷岛产生热回流、冬季低温条件下管束冻裂及风机停转等故障。直接空冷凝汽器的11种典型故障和12种故障征兆见表1、2[10]。
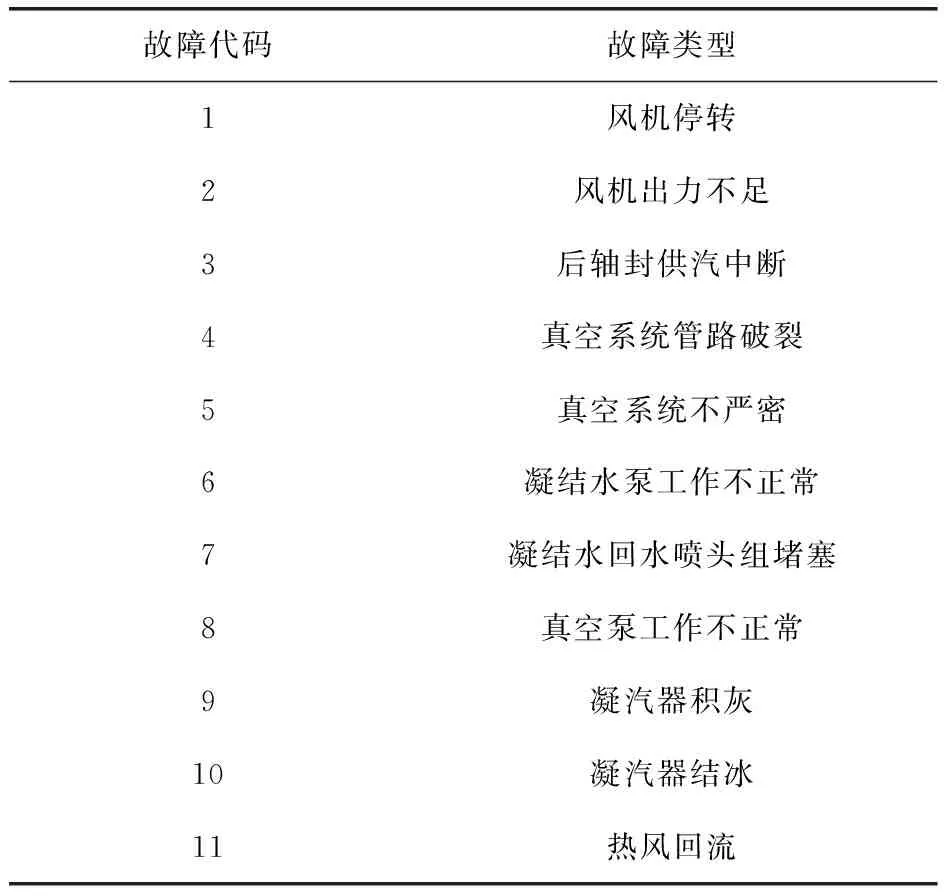
表1 直接空冷凝汽器故障集
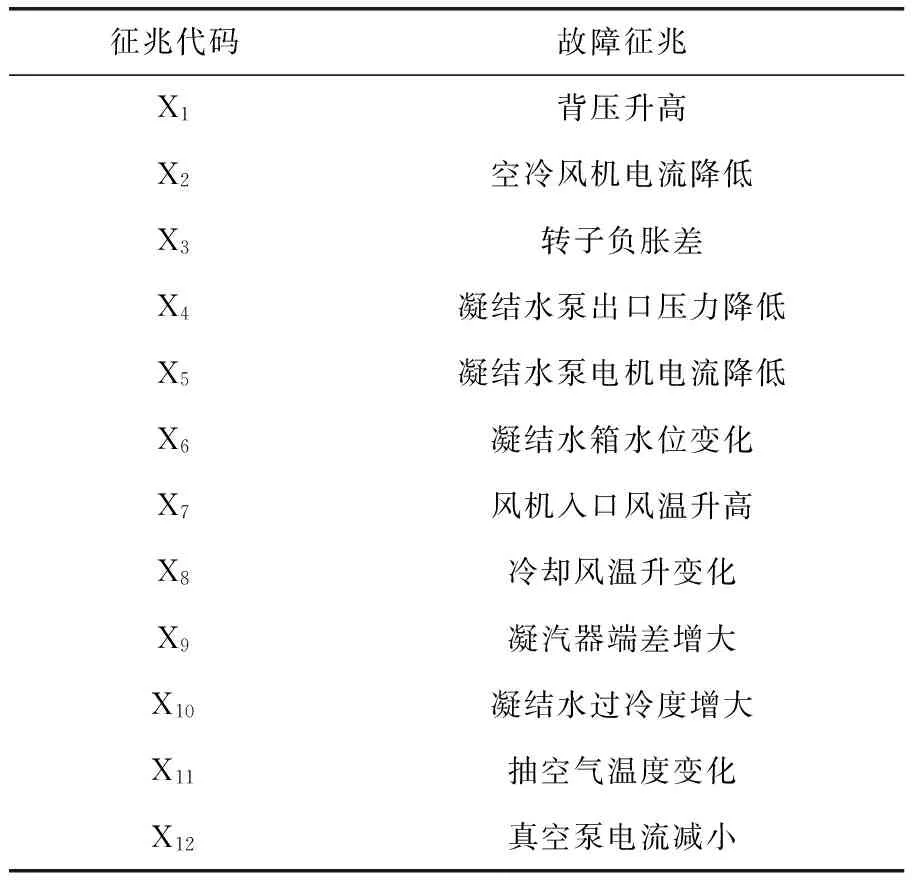
表2 直接空冷凝汽器故障征兆集
为了区别开不同故障发生时征兆参数的状态,将征兆参数进行归一化处理,并将处理后的参数划分为5个阶段,分别用“0”表示正常运行值,“1、-1”表示上下限停机值,“0.5、-0.5”表示上下限报警值。表3给出了直接空冷凝汽器的故障样本集。对于不同机组,这5个阶段的标准不同,应根据实际情况进行设计。
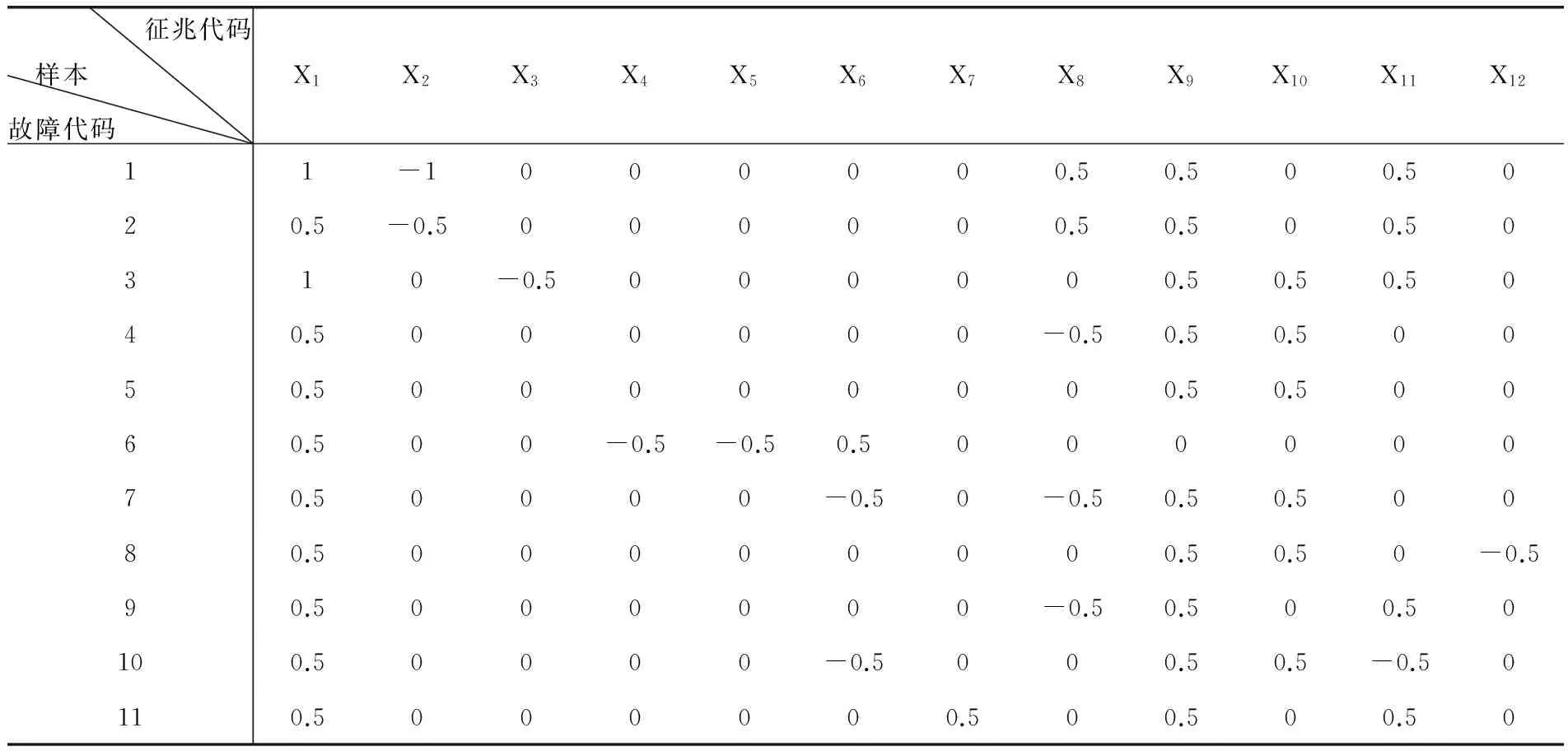
表3 直接空冷凝汽器故障样本集
5.2神经网络训练
为了提高Elman神经网络的稳定性,笔者采用traindx作为训练函数,该函数是动量和自适应的梯度递减训练函数,分别以tansig函数和purelin函数作为隐层传递函数和输出层传递函数。Elman神经网络的隐含层神经元个数对网络性能影响最大,隐含层神经元个数选的过少,网络达不到理想的精度,容错性差;个数过多又会导致训练时间过长。因此,在训练过程中通过比较不同的隐含层节点的网络性能,选择训练精度好,时间相对短的网络所对应的隐含层节点数作为隐含层神经元个数。本网络选择13隐含层节点,网络训练到第374步时达最优值,误差性能曲线如图4所示。
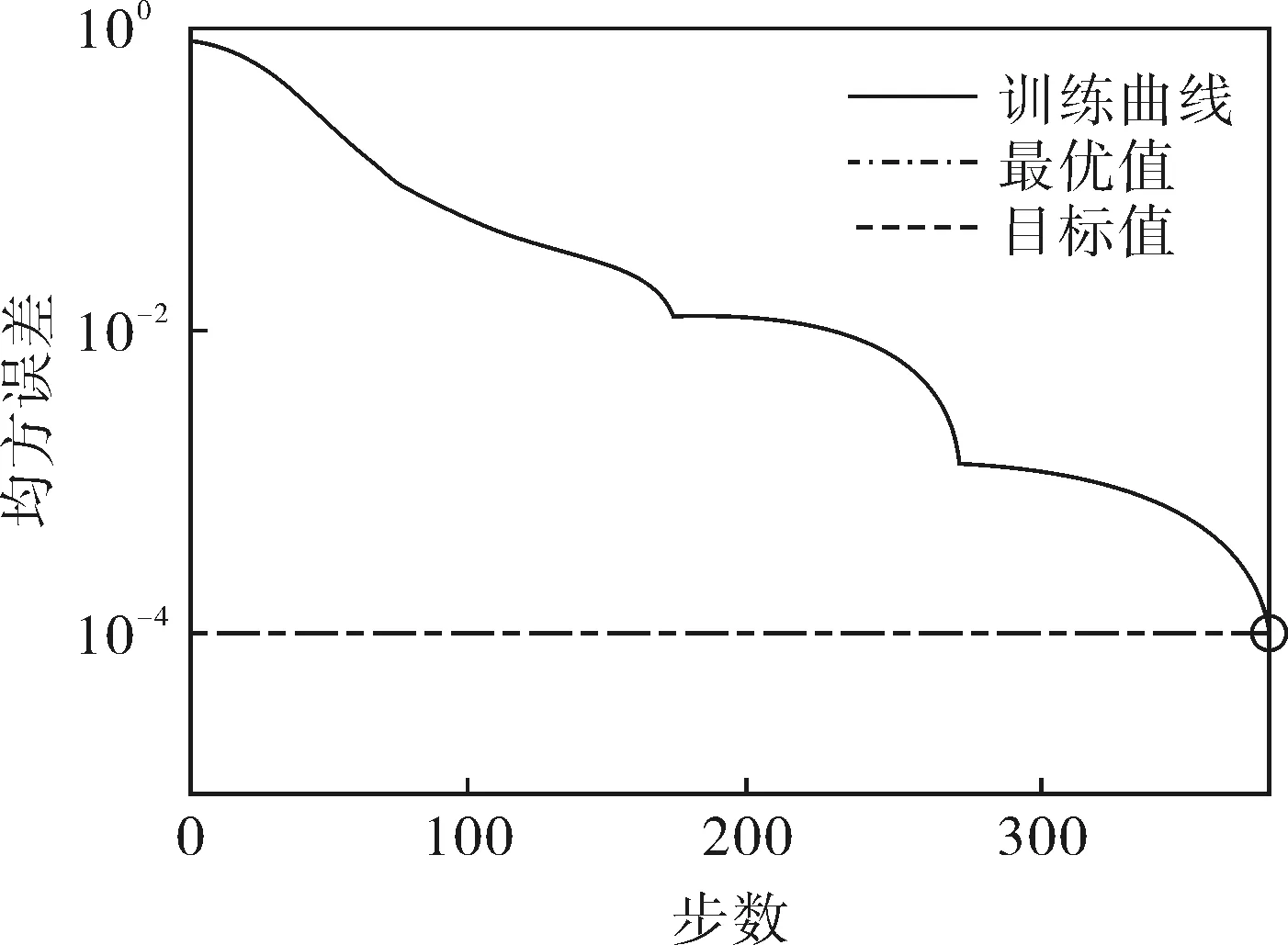
图4 Elman网络的误差性能曲线
RBF网络分布密度(spread)的大小对网络的最终精度有很大的影响。spread越大,网络的函数拟合越平滑,但并不是越大越好,spread过大可能导致逼近误差变大,网络的设计过程中需要调整spread值,从而达到理想的精度。本网络的spread为3,网络训练到第11步时达最优值,误差性能曲线如图5所示。
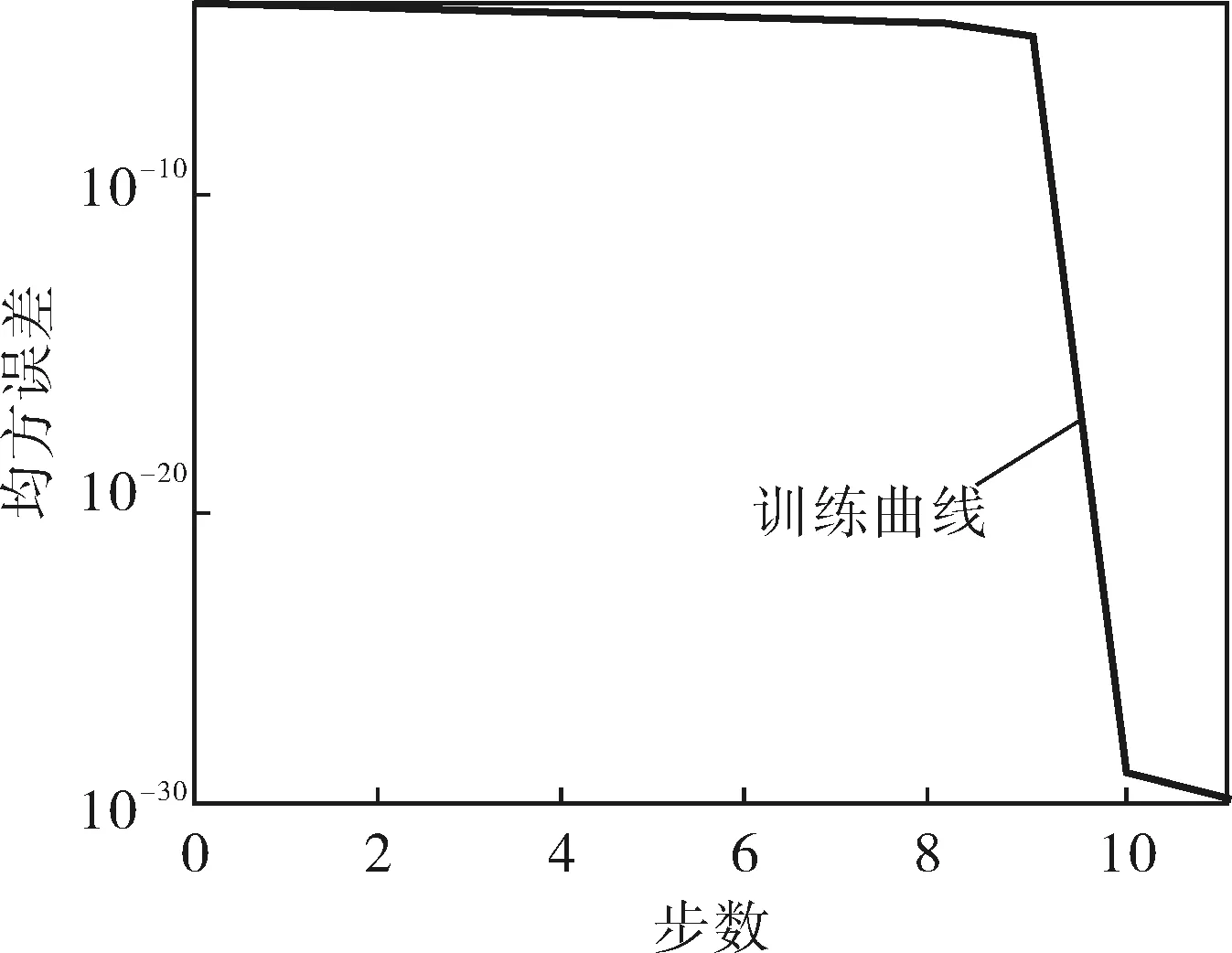
图5 RBF网络的误差性能曲线
5.3实例诊断
实例1,某300MW直接空冷系统风机出力不足[17],故障征兆如下:凝汽器压力由13.0kPa升高到15.2kPa,凝结水温度由51.1℃升高到54.3℃,冷却风温升由22.4℃升高到24.8℃,端差由8.5℃增加到9.3℃。将这些征兆通过归一化转换成神经网络输入向量为[0.5,0,0,0,0,0,0,0.5,0.5,0,0,0]。
实例2,某350MW直接空冷机组凝结水回水喷头严重堵塞[18],运行过程出现如下征兆:负荷由130MW升高到260MW时,背压由26kPa升高到42kPa,凝结水箱水位由2 200mm降到1 500mm,端差增大,过冷度增大。将这些征兆通过归一化转换成神经网络输入向量[0.5,0,0,0,0,-0.5,0,0,0.5,0.5,0,0]。
运用D-S理论时,需要满足2D→[0,1],而神经网络的输出可能超出该范围,因此需要进行相应的预处理。笔者采用如下截断处理方法:
(9)
首先要求出各故障的基本概率赋值满足:

(10)
一般情况下,基本概率赋值的选取依靠专家经验。一般认为,在某次事故中当某种故障的隶属度较大时,说明该故障发生的可能性较大,可以认为此次事故中该故障发生的概率大。因此,可以把隶属度经过适当变换代替专家经验,令基本概率:
(11)
使用式(11)处理网络输出,再利用式(8)获得两个故障的K分别是0.743 4、0.792 8,都小于1,所以相应的M1和M2是可以融合的,然后通过式(7)获得诊断结果。
表4中,采用Elman神经网络进行故障诊断,故障2(实例1)、故障7(实例2)的可信度分别为0.676 3、0.517 6;表5中,采用RBF神经网络进行故障诊断,故障2(实例1)、故障7(实例2)的可信度分别为0.754 8、0.516 5;而采用D-S证据理论对神经网络的诊断结果进行融合之后,得到表6中故障2(实例1)、故障7(实例2)的可信度分别为0.802 8、0.877 5。由此可见,仅采用单一的神经网络对故障状态进行诊断识别,得到的故障信任度比较低。而经过D-S证据理论融合处理之后,最有可能发生故障的点对应的基本概率赋值比Elman网络和RBF神经网络输出高很多,并且其他非故障项的可信度降低,可以有效地提高故障的识别率。

表4 Elman网络的故障测试结果

表5 RBF网络的故障测试结果

表6 D-S证据理论综合诊断结果
6 结束语
笔者提出了一种D-S证据理论融合的方法对直接空冷凝汽器故障进行诊断。首先,利用故障样本训练Elman和RBF神经网络,产生一个初始诊断结果。然后,把D-S证据理论应用于初步诊断结果得到最终的决策。这种方法克服了单一神经网络的故障可信度不高的缺点,极大地提高了诊断的准确性和可靠性。在实际应用中,网络收敛速度快,融合过程简单易行,整个诊断过程效率较高。笔者的研究为其他类型的故障诊断提供了新思路。
[1] 彭敏放,何怡刚,王耀南,等.模拟电路的融合智能故障诊断[J].中国电机工程学报,2006,26(3):19~24.
[2] Xia F,Zhang H,Peng D G,et al.Condenser Fault Diagnosis Based on FNN and Data Fusion[C].Applied Mechanics and Materials.Switzerland:Trans Tech Publications,2011:3762~3766.
[3] 姜万录,刘思远.多特征信息融合的贝叶斯网络故障诊断方法研究[J].中国机械工程,2010,21(8):940~945.
[4] 王发智,曹建鹰,牛润勋,等.基于神经网络的热风炉的模糊控制[J].化工自动化及仪表,2012,39(1):14~18.
[5] 夏琳琳,王丹,杨有民,等.融合并行Elman网络与D-S理论的凝汽器故障诊断[J].化工自动化及仪表,2014,41(4):362~367.
[6] 王利民.贝叶斯学习理论中若干问题的研究[D].长春:吉林大学,2005.
[7] 彭安华,肖兴明,岳睿.基于模糊网络分析法的维修策略决策[J].中南大学学报,2014,45(3):783~789.
[8] 成明涛.直接空冷凝汽器故障诊断方法研究[D].北京:华北电力大学,2011.
[9] Li Y,Fu Y,Zhang S W.Improved Algorithm of the Back Propagation Neural Net Work and Its Application in Fault Diagnosis of Air-Cooling Condenser[C].Proceedings of the 2009 International Conference on Wavelet Analysis and Pattern Recognition.Baoding:IEEE,2009:180~184.
[10] 高建强,马亚,钟锡镇,等.基于遗传神经网络的直接空冷凝汽器故障诊断研究[J].华北电力大学学报,2013,40(3):69~73.
[11] Denoeux T.A Neural Network Classifier Based on Dempster-Shafer Theory[J].IEEE Transactions on Systems,2000,30(2):131~150.
[12] 陈明.神经网络原理与实例精解[M].北京:清华大学出版社,2013:285~286.
[13] 陆爽,李萌.基于小波神经网络的滚动轴承故障诊断[J].化工机械,2004,31(3):155~158.
[14] 吴宏晓,侯志俭,刘涌,等.基于免疫聚类径向基函数网络模型的短期负荷预测[J].中国电机工程学报,2005,25(16):53~56.
[15] Yang Bo-Suk,Kim Kwang Jin.Application of Dempster-Shafer Theory in Fault Diagnosis of Induction Motors Using Vibration and Current Signals[J].Mechanical Systems and Signal Processing,2006,20(2):403~420.
[16] Wang J P,Lin S D,Bao Z F.Neural Network and D-S Evidence Theory Based Condition Monitoring and Fault Diagnosis of Drilling[C].Applied Mechanics and Materials.Switzerland:Trans Tech Publications,2012:481~486.
[17] 马亚.结合仿真技术的直接空冷凝汽器故障诊断研究[D].北京:华北电力大学,2012.
[18] 段学友,张谦,高志国.350MW超临界机组直接空冷系统运行故障分析及处理[J].内蒙古电力技术,2011,29(3):85~88.
ResearchofFaultDiagnosisMethodforAir-cooledCondensersBasedontheD-SEvidenceTheory
YU Lan
(SchoolofEnergyandPowerEngineering,ChangchunInstituteofTechnology,Changchun130012,China)
A fault diagnosis method based on Elman network and RBF network fused by the D-S evidence theory was proposed and applied in the fault diagnosis of air-cooled condensers. In which, having the neural networks adopted for preliminary diagnosis of faults to get the membership degree in relation to different fault status, and then having D-S evidence adopted for decision-making diagnosis to get final result. In addition, the air-cooled condenser’s fault feature extraction, sample selection, diagnosis system structure and the learning
*于 兰,女,1979年10月生,讲师。吉林省长春市,130012。
TQ051.6+1
A
0254-6094(2016)03-0373-07
2015-05-15,
2016-05-05)
(Continued on Page 415)
