基于无源传感器协同的机载雷达自适应辐射控制算法*
2016-12-23戴春亮时晨光周建江
戴春亮 时晨光 周建江 汪 飞
(1.隐身技术航空科技重点实验室,沈阳, 110001; 2.中航工业沈阳飞机设计研究所,沈阳, 110001;3.南京航空航天大学雷达成像与微波光子技术教育部重点实验室,南京, 210016)
基于无源传感器协同的机载雷达自适应辐射控制算法*
戴春亮1,2时晨光3周建江3汪 飞3
(1.隐身技术航空科技重点实验室,沈阳, 110001; 2.中航工业沈阳飞机设计研究所,沈阳, 110001;3.南京航空航天大学雷达成像与微波光子技术教育部重点实验室,南京, 210016)
随着现代战场中电子对抗的日益激烈,雷达的生存环境受到了严重威胁。射频隐身技术是一种提高雷达及其搭载平台战场生存能力的重要途径。文中采用一种基于交互式多模型(Interacting multiple model, IMM)和扩展卡尔曼滤波(Extended Kalman filter, EKF)的序贯滤波方法。该算法优先使用无源传感器进行目标跟踪,将滤波过程中的状态估计预测协方差与预先设定的协方差门限进行比较,当目标跟踪精度不满足要求时,开启雷达工作。同时根据目标运动状态自适应地调整雷达工作时的辐射能量,从而进一步减小目标跟踪过程中机载雷达的辐射总能量。仿真结果表明,本文算法可以有效地配置机载雷达工作参数,提升系统的射频隐身性能。
传感器协同; 辐射控制; 射频隐身; 机载雷达; 目标跟踪
引 言
机载相控阵雷达是现代战机的主要信息感知装备,在当今战争和局部冲突中发挥着重要作用。相控阵雷达的工作参数可根据作战环境动态调整,更有利于雷达作战效能的有效发挥,具有传统机械扫描雷达难以比拟的优势。然而,随着现代战场环境的日趋复杂,各种反雷达措施使得机载雷达的生存环境受到了严重的威胁和挑战。射频隐身技术是指机载雷达、数据链等电子设备抵御射频无源截获、分选、识别和跟踪的隐身技术,以降低敌方无源探测系统对飞机的截获距离、截获概率为目标,能够进一步提高飞机的生存能力和突防能力。因此各国将射频隐身雷达的研制置于重要地位[1-4]。近些年来,许多学者针对雷达的射频隐身技术开展了卓有成效的研究。文献[5]建立了以评估发现目标能力的检测概率和评估射频隐身能力的截获概率为指标,以脉冲峰值功率和驻留时间为优化参数的雷达探测多目标优化模型,并采用改进非支配遗传算法进行了求解。文献[6]研究了机载相控阵雷达基于射频隐身的搜索控制参量优化设计。通过分析截获概率原理,给出了目标特征和雷达系统性能对驻留时间和波位间隔等搜索控制参量的影响关系,构建了目标探测性能与隐身性能约束下的优化模型。文献[7]对基于射频隐身需求的机载雷达目标搜索问题进行了研究,通过分析实际作战中射频辐射面临的截获威胁,提出了一种基于联合截获威胁的射频隐身性能表征方法,对机载雷达搜索任务中辐射参数的优化问题进行了建模,并采用优化算法对目标函数进行了求解。廖雯雯等针对具有多输入多输出(Multiple input multiple output, MIMO)探测模式的新体制雷达提出了射频隐身性能优化的目标跟踪算法[8]。文献[9]则首次研究了机载雷达组网系统的射频隐身问题。为进一步提高数据链的射频隐身性能,文献[10]提出了一种基于空间信息的射频隐身数据链最优能量控制算法。无源传感器协同是提高机载雷达射频隐身性能的重要手段。文献[11]提出了以单个控制因子设定协方差门限的有源雷达辐射控制方法,仿真结果表明,控制因子越小,有源照射次数越多,跟踪误差越小。文献[12,13]研究了雷达间歇工作下的雷达/红外复合制导跟踪方法,该算法采用基于交互式多模型(Interacting multiple model, IMM)和扩展卡尔曼滤波(Extended Kalman filter, EKF)的序贯滤波方法,利用滤波过程中的状态估计协方差与测量误差方差进行比较控制雷达间歇工作。总的来说,上述算法虽然均涉及机载雷达的射频隐身性能优化,但是未考虑无源传感器协同下的机载雷达辐射控制,具有一定的局限性。
本文针对机载雷达的射频隐身问题,提出了一种基于无源传感器协同的机载雷达自适应辐射控制算法。该算法采用基于IMM和EKF的序贯滤波方法,将滤波过程中的状态估计预测协方差与预先设定的协方差门限进行比较,当目标跟踪精度满足要求时,雷达不工作,由无源传感器提供量测信息对目标进行跟踪;当目标跟踪精度不满足要求时,开启雷达工作,同时在保证一定的目标检测性能的条件下,根据目标运动状态自适应地调整雷达工作时的辐射能量,从而进一步减小目标跟踪过程中机载雷达的辐射总能量。仿真结果验证了本文算法的鲁棒性和有效性。
1 传感器目标跟踪模型

(1)
(2)
(3)
(4)

(5)
模型i的概率更新如下
(6)
(3) 计算r个模型交互后的输出估计及其协方差作为k时刻序贯滤波的状态估计和协方差估计,有
(7)
(8)


(9)
(10)
(11)
(12)


(c) 计算r个模型交互后的输出估计及其协方差作为k时刻序贯滤波的状态估计和协方差估计,即
(13)
(14)
2 算法描述
2.1 截获概率及参数分析
截获接收机要实现对雷达信号的有效截获,需要满足时域、空域、频域、能量以及极化方式等5维空间上同时与雷达信号“对准”。因此截获概率是时、空、频、能量和极化等多维变量的函数,可以表示为一个在多维空间中的几何概率问题。综合考虑上述截获因素,建立截获概率模型,有
(15)
式中:AF为雷达天线波束覆盖面积,DI为截获接收机的密度,TOT为雷达对截获接收机的照射时间,TI为截获接收机的搜索时间,pF表示截获接收机探测到雷达波束能量的检测概率,pD表示截获接收机调谐到雷达发射及频率上的概率。
本文中,假设截获接收机位于雷达探测的目标上,在频域宽开,且雷达对目标的照射时间小于截获接收机的搜索时间,则当pi≪1时,式(15)可以简化为
(16)
式中:Pi为截获接收机接收到的功率,PI为截获接收机探测所需功率,Co为覆盖区/灵敏度比例因数,对圆形孔径的典型值为0.477。当采用随机扫描时,TOT即为雷达波束驻留时间。
在翻译过程中,译者吸取了原语内容,由于原语和目标语及其文化背景的不同,译者就会不可避免、主观地作出相应的调整和修改;也就是说,选择一些合适的翻译策略来协调两者的差别。首先,译者必须考虑原作者的写作意图,目标语形式和目标语读者的接受程度。“我们甚至可以说,没有创造性叛逆,也就没有文学的传播与接受。……但这仅仅是文学的创造性叛逆的一个方面,创造性叛逆的更重要的方面还在于它对文学作品的接受与传播所起的作用。”[6]141但是,译者的有意识误译,即译者所作出的创造性叛逆必须有一个度的限制。
如果在跟踪过程中需要对目标多次辐射,可以采用累积截获概率
(17)
式中:Picum表示在目标跟踪过程中发生截获的累积概率,K为雷达辐射次数,pi_k为发射一次截获的截获概率。由式(15,17)可知,雷达对目标辐射次数越多,辐射功率越大,辐射驻留时间越长,则被截获的概率就越大。在此基础上,提出基于无源传感器协同的机载雷达自适应辐射控制算法。
2.2 基于无源传感器协同的机载雷达辐射控制
基于无源传感器协同的机载雷达辐射控制是指目标跟踪过程中,在保证跟踪精度的前提下尽可能减少机载雷达的辐射次数,在雷达辐射间隙阶段由无源传感器对目标进行跟踪。在基于无源传感器协同的机载雷达辐射控制算法中,雷达的辐射时刻和辐射次数都是随机的,利用目标状态估计预测协方差和预先设定的协方差门限进行比较来控制雷达辐射,当预测协方差小于门限值时,表明目标跟踪精度满足系统要求,雷达不辐射,由无源传感器提供量测信息对目标进行跟踪;当预测协方差超过门限时,表明目标跟踪精度不满足系统要求,雷达辐射。本文中,假设目标持续对外辐射电磁信号,而且机载无源传感器能够连续获得目标的量测数据。
(1) 采用基于IMM-EKF的序贯滤波算法对机载雷达的量测点迹进行滤波。在此,定义状态估计预测协方差为
(18)

2.3 自适应辐射能量控制算法
当机载雷达开机进行目标跟踪时,雷达辐射能量的自适应设计受雷达检测概率、虚警概率及目标距离等条件的约束[14]。根据雷达方程,最小可检测信噪比可以表示为
(19)
其中
(20)
式中:K为雷达系统常数,Pt为雷达平均辐射功率,τd为雷达波束驻留时间,R为目标距离,Gt为雷达发射天线增益,Gr为雷达接收天线增益,λ为雷达信号波长,σ为目标雷达散射截面,k为玻尔兹曼常数,T0为雷达接收机噪声温度,L为雷达系统损耗。
假设机载雷达在平均辐射功率为Pto、驻留时间为τdo和目标距离为Ro时,系统最小可检测信噪比为SNRo,即
(21)
将式(12)与式(19)的等式两边相比,可以得到
(22)
(23)
SNR≥SNRo
(24)
式中:Ptmax和Ptmin分别为雷达平均辐射功率的上下限,τdmax和τdmin分别为驻留时间的上下限。
3 仿真结果与分析
为了验证基于无源传感器协同的机载雷达自适应辐射控制算法的可行性和有效性,并进一步分析系统参数对机载雷达射频隐身性能的影响,本文针对一个2维平面中运动的目标场景进行仿真。
假设雷达平均辐射功率为0≤Pt≤20 kW,驻留时间为10-3s≤τd≤0.5 s,雷达发射天线增益为GT=30 dB,雷达在截获接收机方向上的天线增益为GIT=0 dB,雷达发射信号波长为λ=0.03 m,Pto=20 kW,τdo=0.5 s,Ro=200 km,SNRo=13 dB。截获接收机天线增益为GI=0 dB,扫描时间为5 s,处理器增益为0.5,外部损耗为1.5,其探测所需功率为5×10-9W。假设飞机平台位于直角坐标系的原点(0,0),跟踪过程中的采样间隔为3 s,无源传感器获得目标的角度量测误差为0.3°。目标跟踪过程中的协方差门限设定为40 m2。目标起始位置位于(80 km,50 km),速度为(0.40 km/s,0.30 km/s)。目标的运动轨迹为在0~60 s内做匀速直线运动,在60~150 s内做转弯率ω=0.0175的匀速右转弯运动,在150~180 s内继续做匀速直线运动,而在最后的180~255 s内做转弯率ω=-0.017 5的匀速左转弯运动。仿真中采用模型个数r=3的交互式多模型(IMM)算法,其中3个模型分别为匀速(Constant velocity, CV)模型和两个具有相反旋转因子的协同转弯(Coordinate turn, CT)模型。假设模型的转移概率矩阵为

(25)
仿真实验采用蒙特卡洛实验,仿真结果为500次实验结果的平均值,仿真结果分别如图1~5所示。
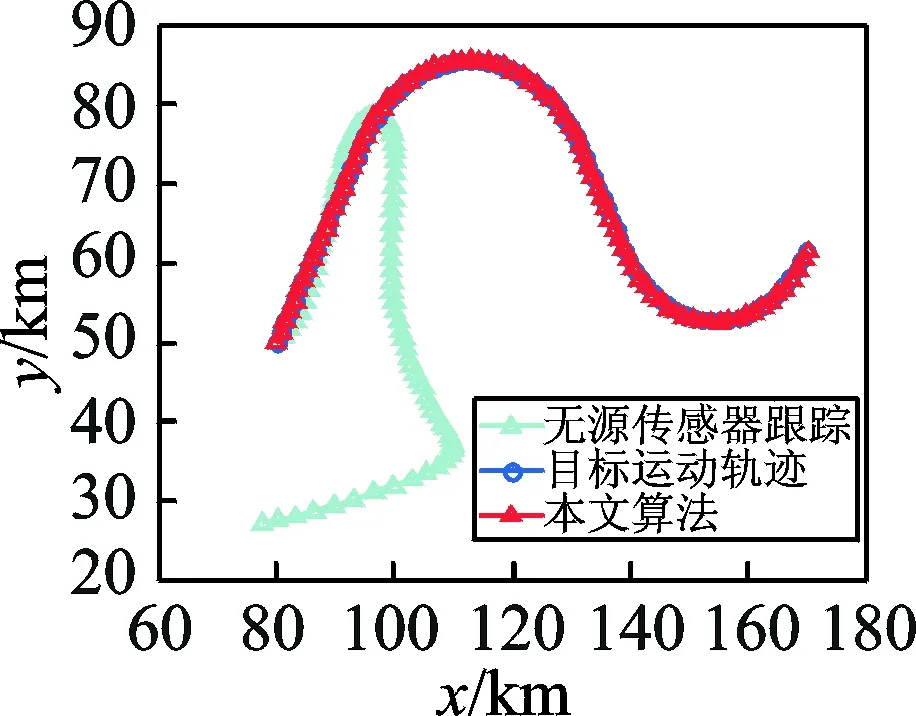
图1 目标跟踪轨迹Fig.1 Simulated target trajectory图2 无源传感器协同跟踪RMSEFig.2 Target tracking RMSE based on passive sensor cooperation图3 雷达工作状态Fig.3 Radar real-time radiation state

图4 机载雷达辐射能量Fig.4 Airborne radar trans- mitted energy图5 跟踪过程中机载雷达 辐射总能量比较Fig.5 Comparison of airborne radar transm- itted energy in target tracking图6 跟踪过程中机载雷达 截获概率比较Fig.6 Comparison of probabilities of intercept in target tracking
由图1和图2可以看出,单纯采用无源传感器进行目标跟踪的跟踪轨迹已经严重偏离目标的真实运动轨迹,而采用无源传感器协同的机载雷达目标跟踪轨迹十分接近目标的真实运动轨迹,且其位置均方根误差(Root mean square error, RMSE)控制在0.4 km以内。这是由于单机平台无源传感器只能获得目标的角度信息而不能获得目标的距离信息,所以单纯的无源跟踪具有较差的目标跟踪精度。
图3表明了在85次仿真步骤中,累计均方根误差(Accumulative root mean square error, ARMSE)为0.113 7 km时的机载雷达辐射次数为42次,辐射次数降低了50%。图4给出了跟踪过程中机载雷达的辐射能量变化曲线。图5为本文算法(Adaptive revisit time and adaptive energy, ARTAE)与自适应采样间隔恒定辐射能量(Adaptive revisit time and constant energy, ARTCE)、恒定采样间隔恒定辐射能量(Constant revisit time and constant energy, CRTCE)在目标跟踪过程中总辐射能量的比较。仿真结果表明,机载雷达辐射能量随着距离目标的远近自适应变化,同时在跟踪过程中,采用本文算法的机载雷达辐射总能量最低。
为了进一步验证本文算法的可行性和优越性,图6给出了3种算法在跟踪过程中截获概率的比较。从图中可以看出,与ARTCE和CRTCE相比,本文所提算法可以有效地降低机载雷达的截获概率,从而验证了式(23,24)可行性和有效性。由此可以得到,采用无源传感器协同的机载雷达目标跟踪能在保证目标跟踪精度的前提下极大地降低了机载雷达对外辐射能量,从而有效地提升飞机的射频隐身性能。
4 结束语
无源传感器协同是实现飞机射频隐身性能的关键技术之一。本文重点研究了无源传感器协同下的机载雷达射频隐身性能优化方法,从控制雷达采样间隔和辐射能量出发,提出了一种基于无源传感器协同的机载雷达自适应辐射控制算法,该算法通过分析雷达目标跟踪时的射频隐身策略,建立了射频隐身目标优化模型,并进行了模型的求解与仿真。仿真结果表明,本文所提算法可以在保证机载雷达跟踪性能的前提下,有效控制机载雷达的辐射时间和辐射能量,从而有利于提升机载雷达的射频隐身性能,提高飞机在现代战场中的生存能力和突防能力。本文算法仅讨论了单目标跟踪的情况,对于多目标情况有待进一步研究。
[1] Schleher D.C. LPI radar: Fact or fiction [J]. IEEE Aerospace and Electronic Systems Magazine, 2006, 21(5):3-6.
[2] Lynch D Jr. Introduction to RF stealth [M]. Sci Tech Publishing, 2004:1-9.
[3] Stove A G, Hume A L, Baker C J. Low probability of intercept radar strategies [J]. IEE Proceedings of Radar, Sonar and Navigation, 2004, 151(5):249-260.
[4] Lawrence D E. Low probability of intercept antenna array beamforming [J]. IEEE Trans on Antennas and Propagation, 2010, 58(9):2858-2865.
[5] 廖俊, 于雷, 周中良, 等. 机载相控阵雷达探测参数优化[J]. 仪器仪表学报, 2012, 33(11):2487-2494.
Liao Jun, Yu Lei, Zhou Zhongliang, et al. Optimizing detection parameters of airborne PAR [J]. Chinese Journal of Scientific Instrument, 2012, 33(11):2487-2494.
[6] 张杰, 汪飞, 阮淑芬. 基于射频隐身的相控阵雷达搜索控制参量优化设计[J]. 数据采集与处理, 2014, 29(4):636-641.
Zhang Jie, Wang Fei, Ruan Shufen. Optimation design for search control parameter of phased array radar based on RF stealth [J]. Journal of Data Acquisition and Processing, 2014, 29(4):636-641.
[7] 李寰宇, 查宇飞, 李浩, 等. 联合截获威胁下的雷达射频隐身目标搜索算法[J]. 航空学报, 2015, 36(1):1-11.
Li Huanyu, Zha Yufei, Li Hao, et al. Radar stealth algorithm based on RF stealth in the case of joint intercepted [J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(1):1-11.
[8] 廖雯雯, 程婷, 何子述. MIMO雷达射频隐身性能优化的目标跟踪算法[J]. 航空学报, 2013, 34(4):1134-1141.
Liao Wenwen, Cheng Ting, He Zishu. A target tracking algorithm for RF stealth performance optimization of MIMO radar [J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(4):1134-1141.
[9] Shi Chenguang, Wang Fei, Sellathurai M, et al. LPI optimization framework for target tracking in radar network architectures using information-theoretic criteria [J]. International Journal of Antennas and Propagation, 2014, 2014:1-10.[10]杨宇晓, 周建江, 陈卫东, 等. 基于空间信息的射频隐身数据链最优能量控制算法[J]. 宇航学报, 2013, 34(7):1008-1013.
Yang Yuxiao, Zhou Jianjiang, Chen Weidong, et al. An optimal energy control algorithm for radio frequency stealth datalink based on spatial information [J]. Journal of Astronautics, 2013, 34(7):1008-1013.
[11]薛朝晖, 周文辉, 李元平. 机载雷达与红外协同资源管理技术[J]. 现代雷达, 2012, 34(3):1-6.
Xue Zhaohui, Zhou Wenhui, Li Yuanping. Technology of the cooperative resource management for airborne active radar and passive IR [J]. Modern Radar, 2012, 34(3):1-6.
[12]李世忠, 王国宏, 吴巍, 等. IMM-EKF雷达与红外序贯滤波跟踪机动目标[J]. 火力与指挥控制, 2012, 37(1):39-42, 51.
Li Shizhong, Wang Guohong, Wu Wei, et al. Research on maneuvering target tracking via infrared sensor and radar sequence filtering based on IMM-EKF [J]. Fire Control & Command Control, 2012, 37(1):39-42, 51.
[13]李世忠, 王国宏, 吴巍, 等. 雷达间歇工作下的雷达/红外复合制导跟踪[J]. 红外与激光工程, 2012, 41(6):1405-1410.
Li Shizhong, Wang Guohong, Wu Wei, et al. Radar and infrared sensor compound guidance with radar under intermittent-working state [J]. Infrared and Laser Engineering, 2012, 41(6):1405-1410.
[14]张贞凯, 周建江, 田雨波, 等. 基于射频隐身的采样间隔和功率设计[J]. 现代雷达, 2012, 34(4):19-23.
Zhang Zhenkai, Zhou Jianjiang, Tian Yubo, et al. Design of sampling interval and power based on radio frequency stealth [J]. Modern Radar, 2012, 34(4):19-23.

戴春亮(1983-),男,工程师,研究方向:飞机射频隐身技术等,E-mail:daichunliang@163.com。

时晨光(1989-),男,博士研究生,研究方向:飞机射频隐身技术,分布式信息融合及多传感器协同,E-mail:scg_space@163.com。

周建江(1962-),男,教授,博士生导师,研究方向:飞机射频隐身技术、雷达目标特性分析以及阵列信号处理等。
汪飞(1976-),男,副教授,研究方向:飞机射频隐身技术、微弱信号检测以及阵列信号处理等。
Adaptive Radiation Control Algorithm with Passive Sensor Cooperation in Airborne Radar System
Dai Chunliang1,2, Shi Chenguang3, Zhou Jianjiang3, Wang Fei3
(1. Aviation Key Laboratory of Science and Technology on Stealth Technology, Shenyang, 110001, China;2. Shenyang Aircraft Design & Research Institute, Shenyang, 110001, China; 3. Key Laboratory of Radar Imaging and Microwave Photonics, Ministry of Education, Nanjing University of Aeronautics and Astronautics, Nanjing, 210016, China)
With the increasingly fierce struggle of electronic countermeasures in the modern battlefield, the environment of radar falls under serious threat. Radio frequency(RF) stealth technology is an important approach to improve the viabilities of radar and its platform in the battlefield. In this paper, the problem of RF stealth in airborne radar system is investigated, and a novel optimal resource management algorithm with passive sensor cooperation in airborne radar system is proposed. The sequential filtering algorithm based on interacting multiple model (IMM) and extended Kalman filter (EKF) is employed for target tracking, and the passive sensor is utilized in preference to radar. In the proposed algorithm, the comparison of the predicted state estimation covariance and the predefined threshold of covariance is used to control radar under an intermittent-working state. Furthermore, the radiation energy is adaptively adjusted to improve the RF stealth performance according to the target motion. Numerical simulation results demonstrate that the proposed algorithm can effectively configure radar working parameters and improve RF stealth performance.
sensor cooperation; radiation control; radio frequency stealth; airborne radar; target tracking
国家自然科学基金(61371170)资助项目;中央高校基本科研业务费专项资金(NJ20140010,NP2015404)资助项目;江苏省高校优势学科建设工程资助项目。
2015-06-02;
2015-12-16
TN951
A