基于蚁群优化算法的光伏阵列多峰特性最大功率点跟踪
2016-12-23万晓凤余运俊胡海林
万晓凤,胡 伟,余运俊,胡海林
(南昌大学信息工程学院,南昌 330031)
基于蚁群优化算法的光伏阵列多峰特性最大功率点跟踪
万晓凤,胡 伟,余运俊,胡海林
(南昌大学信息工程学院,南昌 330031)
在局部阴影条件下光伏阵列的功率输出曲线呈现多峰特性,这时常规算法将不能跟踪到阵列的全局最大功率点。因此,本文提出一种基于蚁群算法跟踪全局最大功率点的方法,算法利用蚂蚁爬行十进制数的每位来生成系统的给定电压,根据实测功率值来调整路径的信息素,使蚂蚁逐渐集中在最优的给定电压路径附近,最终实现光伏阵列的全局最大功率点跟踪。通过Simulink搭建光伏阵列仿真模型,结果表明,在环境发生变化时,蚁群算法可以快速准确地跟踪到具有多峰输出特性的光伏阵列的全局最大功率点,提高了光伏阵列在复杂环境下的输出功率。
光伏阵列;多峰特性;蚁群优化算法;最大功率点跟踪
光伏电池是一种典型的非线性电源,其输出功率易受外界环境影响,如光照辐射强度、电池温度等[1]。为了充分利用太阳能,提高光伏电池的转换效率,就需对光伏电池的输出电压和电流加以控制,保证光伏电池始终工作在最大功率点MPP(maximum power point)[2]。针对光伏电池的最大功率点跟踪MPPT(maximum power point tracking),常规的方法有固定电压法CV(constant voltage)、扰动观察法P&O(perturbation and observation)[3]、电导增量法IC(incremental conductance)[4]等。其中P&O法控制简单、易于实现,在工程上应用较广,IC法跟踪效果强于P&O法,但实现较复杂。这些算法对单峰值输出的光伏阵列最大功率点跟踪取得了很好的效果,但在多云天气或附近有建筑物、树木遮挡时,光伏阵列可能发生局部阴影情况,其功率输出特性存在多峰,这时上述常规算法容易陷入局部极值,不能输出真实的最大功率[5]。
针对上述问题,国内外学者提出了很多种最大功率点跟踪算法。文献[6]提出一种两步法,首先通过在线测量阵列的短路电流和开路电压得到等效负载曲线,然后控制系统工作在最大功率点附近(即等效负载曲线与阵列V-I曲线交点),然后采用IC法精确跟踪,这种方法大部分情况下可以跟踪到最大功率点,但有时交点可能落到局部最大功率点附近。文献[7]提出P-V曲线学习法,首先找到所有功率峰值点,然后比较得出全局最大功率点,此方法缺点是至少要扫描80%的P-V曲线才能得到所有峰值点,算法用时较长。文献[8]提出的Fibonacci搜索法,利用改进的Fibonacci序列逐渐缩小系统的搜索范围来达到最大功率点跟踪,但这种方法不能保证任意情况下都找到全局最大功率点。此外,智能算法也被广泛应用到光伏阵列的最大功率点跟踪,如神经网络算法[9]、模糊逻辑算法[10-11]、粒子群算法[12-13]等。与其他算法相比,智能算法对多峰特性的最大功率点跟踪表现出更强的能力,跟踪效果更好。但神经网络需要足够的训练数据,模糊逻辑中的模糊规则不易设置,而粒子群算法在多峰跟踪中可以取得很好的效果,但其收敛性会受粒子初始值的影响。为此文献[14]提出一种粒子分散定位在可能峰值点的方法,提高了算法的效率。
为解决多峰特性的最大功率点跟踪问题,本文提出一种基于蚁群算法的多峰最大功率点跟踪方法。蚁群算法是一种概率性算法,对非线性问题的全局最优求解具有很好的效果。本文利用连续蚁群算法生成光伏阵列的给定电压,通过实时测量阵列的输出功率正反馈调节蚂蚁信息素,然后迭代求解使蚁群算法逐渐收敛于最大功率点,达到最大功率点跟踪的目的。
1 光伏阵列的多峰特性
1.1 光伏电池模型
为了模拟光伏电池的伏安输出特性,常用的光伏电池等效模型主要有单二极管模型[15-17]和双二极管模型[18-19]。本文采用文献[19]所提出双二极管模型,其简化了电流计算方式并提高了模型的精确度,特别是在低照度情况下精确性依然很好,光伏电池等效电路如图1所示。

图1 双二极管光伏电池模型Fig.1 Two-diode model of PV cell
光伏组件是由多个光伏电池经串联、并联而成,整体看来,其等效电路模型与图1相似,其输出电流表达式为

式中:Ipv为光生电流;Io1、Io2为两个二极管的反向饱和电流;a1、a2是两个二极管的理想常数;Vt1、Vt2为两个二极管的光伏电池热电压,Vt=NskT/q,其中Ns为光伏组件串联电池数,q为电荷常量(1.602×10-19C),k为波尔兹曼常量(1.380 650 3×10-23J/K),T为PN结的开式温度;Rs、Rp分别为光伏组件的等效串联电阻与并联电阻。
当环境变化时,光生电流Ipv随温度、光照强度变化的表达式为

式中:S为当前光照;Ipvn是标准测试条件下STC(standard test condition:Sref=1000 W/m2,Tref=25℃)组件光生电流,其值约等于Iscn;Ki为光生电流温度系数;ΔT为电池温度差,ΔT=T-Tref,T为当前温度。
为了简化模型,两个二极管的反向饱和电流可表示为
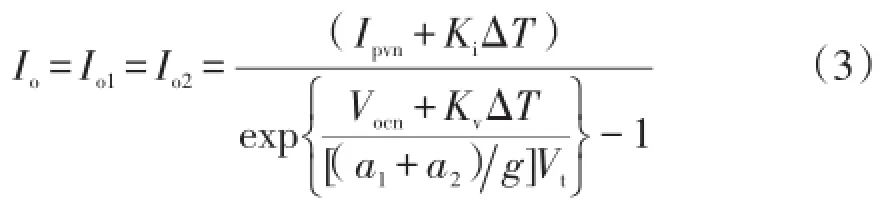
式中:Vocn为STC情况下组件开路电压;Kv为开路电压温度系数。通常a1=1,(a1+a2)/g=1,而a2≥1.2时精度较高,故g≥2.2。式(1)可简化为

根据文献[19]所提方法可求解出光伏组件的Rs、Rp,得到光伏组件V-I方程I=f(I,V),即式(4),通过牛顿迭代法可求出给定电压值所对应的组件电流。本文选取无锡尚德公司的STP250-20/Wd多晶硅太阳能组件,其主要参数(STC)如表1所示。
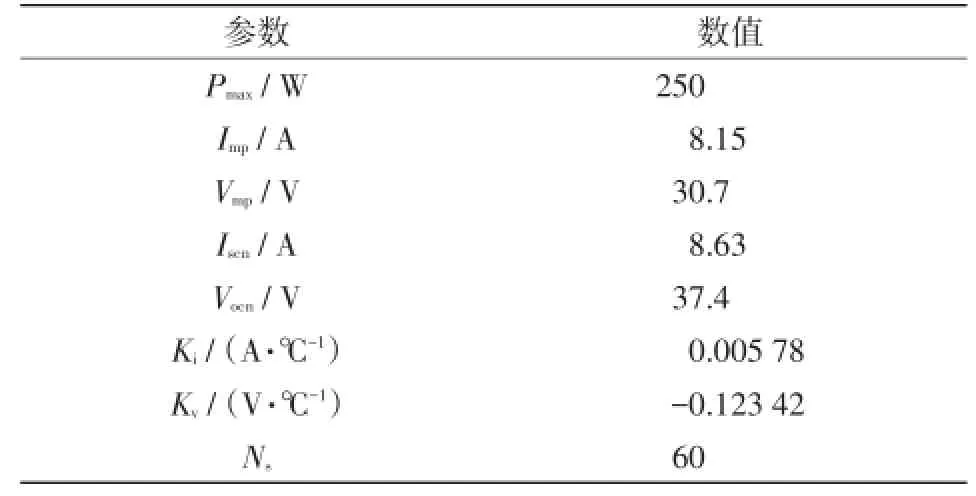
表1 STP250-20/Wd主要参数Tab.1 Main parameters of STP250-20/Wd
根据文献[19]方法可求出Rs=0.25 Ω,Rp= 673.847 2 Ω。由式(2)~式(4)可得光伏组件的输出特性如图2所示。

图2 环境变化时光伏组件输出特性Fig.2 Output curves of PV module in different environments
1.2 光伏阵列的多峰输出特性
每个光伏组件中都串联了若干个光伏电池,当其中一个电池或某一部分电池被遮阴时,且串联支路上其他电池所提供的电流大于被遮阴电池的短路电流,被遮阴电池将被反向偏置并以负载形式消耗能量,这样会产生热斑效应影响电池寿命。为了抑制这种现象,一般由若干个串联的电池反并联一个旁路二极管,这样当发生局部阴影时旁路二极管正向偏置,其他电池正常供电,同时被遮阴电池得到保护[20]。光伏阵列也是由很多的光伏组件经串联、并联得到,以提供更高的电压与电流并进行集中控制。当一个光伏阵列中某些组件出现阴影时,如图3所示,几个光伏组件的光照不均匀。所以光伏组件之间串联每个组件也需要并联一个旁路二极管,并联时每条串联支路需串联一个阻塞二极管避免串联支路作为负载吸收功率[21]。
如图3所示光伏阵列,假设光照分布情况为有阴影部分为400 W/m2,无阴影部分为1 000 W/m2,光伏电池温度均为25℃。若无阴影组件的电流大于被遮阴组件的最大电流,则被遮阴组件停止工作,可得出图4所示的多峰特性曲线,光伏阵列的P-V曲线存在两个峰值,其中只有一点是真正的最大功率,这时如果采用常规算法容易陷入局部最大功率点,降低光伏阵列的效率。

图3 局部阴影下的光伏阵列Fig.3 PV arrays under partially shaded conditions

图4 光伏阵列多峰特性曲线Fig.4 Multi-peak characteristic curves of PV arrays
2 基于蚁群算法的最大功率点跟踪
2.1 蚁群算法
蚁群算法最早被提出应用于旅行商问题[22],其具有分布式并行计算、正反馈的特点,被广泛应用于各种优化问题,如车辆路径问题[23]、机器人路径规划[24]、函数优化[25]、模糊规则优化[26]、参数辨识[27]等。
光伏阵列的最大功率点跟踪问题,实际上就是求解功率输出曲线的最大值,定义阵列的输出电压(或电流)为蚁群算法的决策变量,阵列的实际输出功率为蚁群算法的评价值。蚁群算法把决策变量的值用十进制数字串表示,如图5所示,纵轴范围为0~9的整数,而横轴的长度则根据决策变量的维数、大小范围及精度来确定,若决策变量为多维变量,则各维依次相接。蚂蚁从0开始,每前进一步可以当作选择一位十进制数,行进到最后一位时结束,这样就可以形成一条爬行路径。图5中所示路径表示一维的决策变量,其值由式(5)决定,即

式中:nd是蚂蚁第d步的位置;b是决策变量X的整数部分位数。图5中b=2,故X=34.2。
因为最大最小蚁群算法MMAS(max-min ant system)[28]在解决各类优化问题上有很好的性能,所以基于MMAS构建本文算法,蚂蚁前进时的概率选择公式为

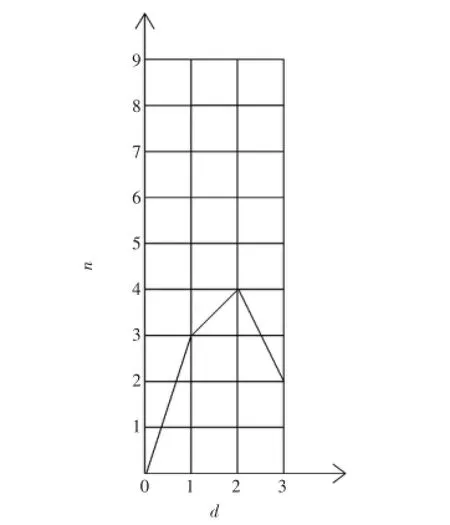
图5 蚂蚁地图Fig.5 Ant map
信息素的更新公式如下:

式中:ρ为信息素挥发系数;Δτd(i,j)是每次迭代最优蚂蚁给其走过路径增加的信息素,与评价值成正比,评价值越大,信息素增量相应越多;Pmax是每次迭代最大功率值;Q是系数。
算法最后表现为构成最优电压值的路径附近信息素较多。式(9)限定信息素的值域,防止信息素之间相差太大,可以抑制算法出现不再扩散,过早停滞的现象,参数τ的初始值可设置为τmax。

2.2 多峰特性最大功率跟踪
由图4可以看出,要使光伏阵列工作在最大功率点,需要控制光伏阵列的输出电压或电流。常用方法中有算法直接输出直流变换器的占空比和输出电压或电流的给定值,然后通过PI控制器控制其稳定。因PI控制器抗干扰能力强,所以本文采用蚁群算法输出光伏阵列的电压给定值,通过PI控制器间接控制直流变换器,具体方法为电压给定值与阵列输出电压实测值比较,其偏差经PI控制器转换为占空比控制量,然后施加给直流变换器的开关器件。此方法能够让阵列输出电压在负载变化时依然稳定在给定值处。
光伏阵列输出电压V作为算法决策变量X,实测功率值P作为算法的评价函数值f(X),算法初始值η设置为最大值10。算法运行过程中,蚂蚁根据所寻功率的大小不断进行信息交流,通过信息素正反馈,最后各蚂蚁逐渐集中到真实最大功率点处的电压路径上,达到跟踪阵列最大功率的目的。因保持算法的搜索能力需长期迭代,这样会导致功率震荡,为让功率尽快稳定,需要使蚁群算法停止运行,当经过一定迭代次数后,目前所获最大功率长时间没有更新时,则默认算法已经找到最大功率点,停止蚁群算法运行。

图6 蚁群优化算法流程Fig.6 Flow chart of ACO algorithm
由于外界环境改变时阵列的输出特性也将改变,所以蚁群算法应该重新启动跟踪新的最大功率点。图6是蚁群优化ACO(ant colony optimization)算法流程。当功率突然发生大的改变时,即式(10)成立时,则认为需重新跟踪最大功率。

式中:P为稳定时阵列输出功率;Pnew为新检测到的功率;ΔP为功率突变率阈值,本文设为0.1。而当环境变化缓慢时,算法也需要有跟踪最大功率缓慢变化的能力,所以设定算法自动随时间重启,每经过一段时间,算法自行重启搜索新的最大功率点。
2.3 蚁群算法执行步骤
(1)系统开机或算法重启:初始化各参数,根据问题所需求解精度确定蚂蚁地图规模,令迭代次数k=1;
(2)各蚂蚁根据式(6)和轮盘赌方法在地图上爬行,形成各自路径;
(3)各蚂蚁路径通过式(5)转换成电压解;
(4)把各电压解依次传递给PI控制器的输入,并测量每个电压对应阵列输出功率值;
(5)根据所测功率值及对应的蚂蚁路径,通过式(7)~式(9)更新信息素,更新当前最大功率及相应的电压;
(6)当迭代次数k>10且当前最大功率值在3次迭代内无改进时,则终止蚁群算法运行,若不满足终止条件,则令k=k+1,返回到步骤(2);
(7)PI控制器电压给定值保持为最大功率点对应电压,等待算法重启。
3 Simulink仿真分析
为验证算法的有效性,在Simulink环境下搭建最大功率点跟踪系统的仿真模型,如图7所示,仿真模型采用两个STP250-20/Wd太阳能组件串联组成光伏阵列。直流变换器采用Boost升压电路,负载用等效阻抗RL表示,电路参数为C1=680 μF,C2=1 000 μF,L=40 μH,RL=150 Ω,考虑到Boost电路稳定需要一定调节时间,算法设定每个电压解的运行周期为0.03 s。
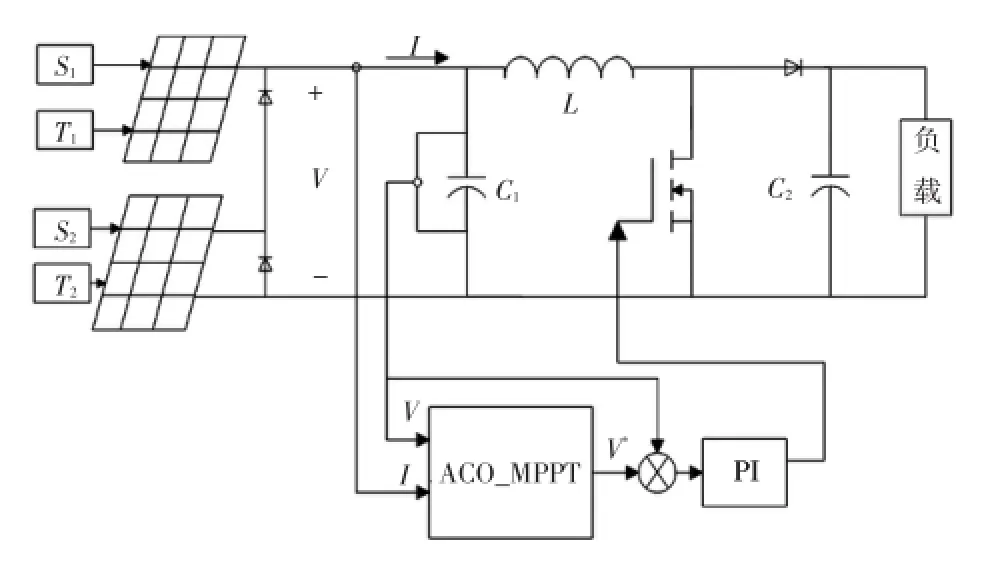
图7 最大功率点跟踪系统Fig.7 MPPT system
蚁群算法主要参数为蚂蚁数量m=3,挥发系数ρ=0.1,α=2,β=1.5,Q=0.001 5,τmax=10,τmin=1。PI控制器的参数为KP=0.05,KI=10。定义阴影情况如表2所示,电池温度一直为常温25℃。图8~图10分别为阴影1变为阴影2、阴影3变为阴影4、阴影5变为阴影1的最大功率点跟踪曲线。
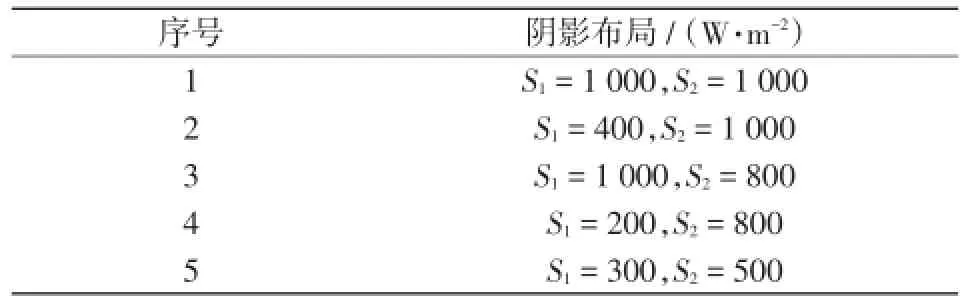
表2 阴影情况分布Tab.2 Distribution of partially shaded conditions

图8 阴影1到阴影2的最大功率点跟踪曲线Fig.8 MPPT curves from shade 1 to shade 2

图9 阴影3到阴影4的最大功率点跟踪曲线Fig.9 MPPT curves from shade 3 to shade 4

图10 阴影5到阴影1的最大功率点跟踪曲线Fig.10 MPPT curves from shade 5 to shade 1
图8中,光照情况由阴影1变为阴影2,这两种情况的实际最大功率分别为500.4 W、243.6 W,从图8中可以看出,经过ACO算法的不断搜索,最后光伏阵列输出功率在1 s内稳定在最大功率点处,而外界环境突变时,算法也能重新启动跟踪到新的最大功率点;图9中两种情况都存在局部阴影;图10中由低辐照的局部阴影情况恢复到正常光照。从图8~图10中可以看出,其均能快速获取各自的最大功率点。
在蚁群算法搜索最大功率点的过程中,因算法是一种全局寻优算法,为发现更优质的解,就需要在全局电压范围内保持搜索能力,这样就造成了搜索过程中阵列输出功率有较大幅度振荡的现象。但通过观察图8~图10中Boost电路的输出功率可以发现,经过Boost电路的能量缓冲,后端功率已经不会像前端功率一样产生大幅振荡现象。而当稳态时,后端功率相对于前端功率的损失是由Boost电路的功率损耗造成,本文中Boost电路的转换效率在95%以上。
表3中显示了用P&O法和ACO算法分别跟踪上述3种变化情形5种阴影情况的最大功率点的结果对比。从表3中结果可以看出,P&O法在阴影2、阴影3和阴影5时误跟踪到阵列输出P-V曲线的局部极值点,降低了光伏电池的输出效率,其值分别为88.8%、57.8%和76.8%;而ACO算法在5种阴影情况下均能跟踪到的最大功率点,虽然系统稳定后有轻微震荡,平均输出功率会略有一点降低,但这对系统效率影响不大。以上结果表明ACO算法可以对多峰特性的光伏阵列最大功率点进行全局跟踪,提高光伏阵列的输出效率。

表3 不同方法获得的最大功率结果Tab.3 Maximum power achieved using different methods
4 结语
本文提出用一种十进制蚁群算法来对具有多峰输出特性曲线的光伏阵列进行最大功率点跟踪。采用双二极管模型建立光伏电池模型,分析了光伏阵列的多峰功率输出特性,利用不断检测实时功率值来调整算法。仿真结果验证了所提蚁群算法的有效性,能够解决常规算法不能跟踪到全局最大功率点的问题,跟踪准确度高,提高了光伏阵列的输出效率。算法在初期的搜索过程中,为保持其全局搜索能力,导致光伏阵列输出功率波动较大。今后将着重研究改进蚁群算法的性能,使其更快收敛到最佳值,提升功率跟踪的效果。
[1]黄舒予,牟龙华,石林(Huang Shuyu,Mu Longhua,Shi Lin).自适应变步长MPPT算法(Adaptive variable step size MPPT algorithm)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2011,23(5):26-30.
[2]Suryakumari J,Sahiti G.Analysis and simulation of modified adaptive perturb and observe MPPT technique for PV systems[J].International Journal of Emerging Trends in Electrical and Electronics,2013,9(1):9-17.
[3]王平,卞建龙(Wang Ping,Bian Jianlong).多级步长光伏电池最大功率点跟踪(Multiple step-sizes MPPT of photovoltaic cell)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2014,26(3):61-65.
[4]Hussein K H,Muta I,Hoshino T,et al.Maximum photovoltaic power tracking:An algorithm for rapidly changing atmospheric conditions[J].IEEE Proceedings-Generation,Transmission and Distribution,1995,142(1):59-64.
[5]Ishaque K,Salam Z,Taheri H,et al.Modeling and simulation of photovoltaic(PV)system during partial shading based on a two-diode model[J].Simulation Modeling Practice and Theory,2011,19(7):1613-1626.
[6]Kobayashi K,Takano I,Sawada Y.A study on a two stage maximum power point tracking control of a photovoltaic system under partially shaded insolation conditions[C]//IEEE Power Engineering Society General Meeting,Toronto,Canada,2003:2612-2617.
[7]Patel H,Agarwal V.Maximum power point tracking scheme for PV systems operating under partially shaded conditions[J].IEEE Trans on Industrial Electronics,2008,55(4):1689-1698.
[8]Miyatake M,Inada T,Hiratsuka I,et al.Control characteristics of a fibonacci-search-based maximum power point tracker when a photovoltaic array is partially shaded[C]//The 4th International Power Electronics and Motion Control Conference,Xi’an,China,2004:816-821.
[9]Syafaruddin,Karatepe E,Hiyama T.Artificial neural network-polar coordinated fuzzy controller based maximum power point tracking control under partially shaded conditions[J].IET Renewable Power Generation,2009,3(2):239-253.
[10]Alajmi Bader N,Ahmed Khaled H,Finney Stephen J,et al.Fuzzy-logic-control approach of a modified hill-climbing method for maximum power point in microgrid standalone photovoltaic system[J].IEEE Trans on Power Electronics,2011,26(4):1022-1030.
[11]徐晓淳,刘春生,李锋(Xu Xiaochun,Liu Chunsheng,Li Feng).光伏系统 MPPT的改进模糊控制(Improved fuzzy control on MPPT method of solar system)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2014,26(9):81-84.
[12]Miyatake M,Veerachary M,Toriumi F,et al.Maximum power point tracking of multiple photovoltaic arrays:A PSO approach[J].IEEE Trans on Aerospace and Electronic Systems,2011,47(1):367-380.
[13]游国栋,李继生,侯勇,等(You Guodong,Li Jisheng,Hou Yong,et al).部分遮蔽光伏发电系统的建模及MPPT控制(Analytical modeling and maximum power point tracking control of partially shaded photovoltaic generation system)[J].电网技术(Power System Technology),2013,37(11):3037-3045.
[14]朱艳伟,石新春,但扬清,等(Zhu Yanwei,Shi Xinchun,Dan Yangqing,et al).粒子群优化算法在光伏阵列多峰最大功率点跟踪中的应用(Application of PSO algo-rithm in global MPPT for PV array)[J].中国电机工程学报(Proceedings of the CSEE),2012,32(4):42-48.
[15]Villalva M G,Gazoli J R,Filho E R.Comprehensive approach to modeling and simulation of photovoltaic arrays[J].IEEE Trans on Power Electronics,2009,24(5):1198-1208.
[16]孔祥雨,徐永海,曾雅文,等(Kong Xiangyu,Xu Yonghai,Zeng Yawen,et al).一种求解光伏电池5参数模型的方法(A parameter extraction method for five-parameter model of photovoltaic cells)[J].电力系统保护与控制(Power System Protection and Control),2013,41(22):46-50.
[17]Ghani F,Rosengarten G,Duke M,et al.The numerical calculation of single-diode solar-cell modeling parameters[J].Renewable Energy,2014,72:105-112.
[18]Babu B C,Gurjar S.A novel simplified two-diode model of photovoltaic(PV)module[J].IEEE Journal of Photovoltaics,2014,4(4):1156-1161.
[19]Ishaque K,Salam Z,Syafaruddin.A comprehensive MATLAB Simulink PV system simulator with partial shading capability based on two-diode model[J].Solar Energy,2011,85(9):2217-2227.
[20]Maki A,Valkealahti S.Power losses in long string and parallel-connected short strings of series-connected siliconbased photovoltaic modules due to partial shading conditions[J].IEEE Trans on Energy Conversion,2012,27(1):173-183.
[21]丁明,陈中(Ding Ming,Chen Zhong).遮阴影响下的光伏阵列结构研究(Reconfiguration of partially shaded photovoltaic array)[J].电力自动化设备(Electric Power Automation Equipment),2011,31(10):1-5.
[22]Dorigo M.Optimization,Learning and Natural Algorithms [D].Milano:Politecnico di Milano,1992.
[23]何小锋,马良(He Xiaofeng,Ma Liang).带时间窗车辆路径问题的量子蚁群算法(Quantum-inspired ant colony algorithm for vehicle routing problem with time windows) [J].系统工程理论与实践(System Engineering—Theory &Practice),2013,33(5):1255-1261.
[24]柳长安,鄢小虎,刘春阳,等(Liu Chang’an,Yan Xiaohu,Liu Chunyang,et al).基于改进蚁群算法的移动机器人动态路径规划方法(Dynamic path planning for mobile robot based on improved ant colony optimization algorithm)[J].电子学报(Acta Electronica Sinica),2011,39(5):1220-1224.
[25]周建新,杨卫东,李擎(Zhou Jianxin,Yang Weidong,Li Qing).求解连续函数优化问题的改进蚁群算法及仿真(Improved ant colony algorithm and simulation for continuous function optimization)[J].系统仿真学报(Journal of System Simulation),2009,21(6):1685-1688.
[26]Juang Chia-Feng,Hung Chi-Wei,Hsu Chia-Hung.Rulebased cooperative continuous ant colony optimization to improve the accuracy of fuzzy system design[J].IEEE Trans on Fuzzy Systems,2014,22(4):723-735.
[27]毛晓明,蔡永智,赵勇(Mao Xiaoming,Cai Yongzhi,Zhao Yong).采用最大-最小蚁群算法的励磁系统参数辨识(Excitation system parameter identification via maximumminimum ant system)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2015,27(5):51-55.
[28]Stutzle T,Hoos H.MAX-MIN ant system and local search for the traveling salesman problem[C]//IEEE International Conference on Evolutionary Computation,Indianapolis,USA,1997:309-314.
关于参数与偏差范围的表示
1 数值范围
五至十可写为5~10;3×103~8×103,不能写成3~8×103。
2 百分数范围
20%~30%不能写成20~30%。
3 具有相同单位的量值范围
1.5 ~3.6 mA不必写成1.5 mA~3.6 mA。
4 偏差范围
(25±1)℃不写成25±1℃;(85±2)%不写成85±2%。
5 带尺寸单位的量值相乘
如50 cm×80 cm×100 cm,不能写50×80×100 cm或50×80×100 cm3。
摘编于《中国高等学校自然科学学报编排规范》(修订版)
Maximum Power Point Tracking Based on Ant Colony Optimization Algorithm for Multi-peak Characteristic of PV Array
WAN Xiaofeng,HU Wei,YU Yunjun,HU Hailin
(College of Information Engineering,Nanchang University,Nanchang 330031,China)
As photovoltaic(PV)array’s power output curves show multi-peak characteristic under partially shaded conditions,traditional algorithms cannot track the global maximum power point of the array.Therefore,a method based on ant colony optimization(ACO)algorithm is proposed in this paper to track the global maximum power point.The algorithm generates the set voltage of PV system by making the ant crawl each decimal digit,and adjusts path pheromones according to measured power to aggregate the ants near the path of optimal set voltage after iteration.Finally,maximum power point tracking(MPPT)is realized.The simulation model of PV array is built in Simulink.The results show that the ACO algorithm can accurately and quickly achieve the global MPPT of PV arrays when the environment changes,which improves the power output efficiency of the PV array.
photovoltaic array;multi-peak characteristic;ant colony optimization algorithm;maximum power point tracking(MPPT)
TM615,TP273
A
1003-8930(2016)12-0070-07
10.3969/j.issn.1003-8930.2016.12.012
万晓凤(1964—),女,硕士,教授,博士生导师,研究方向为计算机控制与嵌入式智能仪表、光伏微网智能控制。Email:xfwan-jx@163.com
胡 伟(1991—),男,硕士研究生,研究方向为光伏微网智能控制。Email:huwei115580@163.com
余运俊(1978—),男,通信作者,博士,讲师,研究方向为光伏微网智能控制、低碳电力。Email:yuyunjun@ncu.edu.cn
2015-03-06;
2016-03-14
国家国际科技合作专项资助项目(2014DFG72240),江西省科技支撑计划资助项目(2013BBE50102),江西省科技落地计划资助项目(KJLD14006)
