基于变差函数和格网划分的居民区特征描述与提取
2016-12-23张恩兵秦昆岳梦雪张晔曾诚
张恩兵, 秦昆, 岳梦雪, 张晔, 曾诚
(武汉大学遥感信息工程学院,武汉 430079)
基于变差函数和格网划分的居民区特征描述与提取
张恩兵, 秦昆, 岳梦雪, 张晔, 曾诚
(武汉大学遥感信息工程学院,武汉 430079)
变差函数作为一种有效的结构特征描述方法,在高分遥感影像居民区提取中有较好的应用。然而,现有利用变差函数进行居民区提取的方法大多采用基于像元的移动窗口,当数据量较大时,计算效率较低,实用性较差,并且针对不同数据源描述纹理结构特征时选取参数的稳健性和有效性较差。为此,采用基于变差函数和格网划分的方法进行居民区的有效提取。首先,将原始影像规则划分为较小的格网单元,作为后续影像处理的基本单元; 然后,依据选取的目标与背景样本计算纹理差值曲线,并基于该曲线选取最优纹理结构的特征描述参数; 最后,利用计算得到的纹理特征从高分影像中提取居民区。实验结果表明,上述算法在对多种高分影像数据提取居民区时,具有更好的空间结构特征描述能力和较高的计算效率。
变差函数; 格网划分; 居民区; 稳健性; 纹理差值曲线; 空间结构
0 引言
居民区是由建筑物、道路、植被等地物共同组成的复合目标,是遥感影像的重要组成部分。居民区提取是遥感影像解译的重要内容,在监测城镇变化,进行城镇规划、灾害评估、地图更新等工作中是必不可少的重要任务。快速发展的遥感数据获取技术带来了大量的遥感信息,为居民区等典型人工地物目标的精确提取提供了有利条件。高空间分辨率(简称“高分”)遥感影像的出现,使目标的纹理结构等细节信息得到充分展现,利用高分影像提取典型地物目标的方法已得到广泛应用[1-2]。
变差函数作为一种有效的纹理结构描述方法,在遥感影像的结构特征建模中已有大量研究。通常,基于变差函数的高分影像纹理特征的计算方式有2种: ①通过邻域窗口计算相应的变差函数值,作为纹理特征赋予中心像元[3-4]; ②对各邻域窗口计算变差函数曲线,提取相应的曲线参数作为纹理特征[5-8]。前者需要通过大量的探索性实验来较好地计算滞后距离; 后者则在计算过程中会涉及到对模型参数的拟合,使得计算较为复杂,而且选取的结构描述参数对不同影像数据存在稳健性与有效性较差的问题。2种处理方法在影像数据量较大时,处理效率均较低。对于高分影像居民区提取这一应用,由于居民区属于大尺度复合目标,其纹理空间结构往往是十分复杂的,采用基于像元的邻域窗口方法难以对各像元的纹理结构进行准确建模; 且计算效率较低,很难满足应用需求。
本文采用基于格网划分的数据处理方式,以划分后的格网单元作为基元对象,在基元层次上对影像中大尺度目标的空间结构进行描述,且针对划分后的格网单元只做一次特征计算,从而简化影像纹理特征的计算; 同时,在特征参数选取过程中提出一种基于纹理差值可区分性判定方式选取最优结构特征参数的方法,使选取的参数对不同影像中的目标结构均具有较好的描述能力。
1 基于改进变差函数的居民区提取
1.1 变差函数模型
变差函数亦称半变差函数,是构建区域化随机变量空间结构的有效工具。其定义为区域化变量Z在p与(p+h)2个像元点处的值Z(p)与Z(p+h)差的方差的一半, 记为γ(h),即

(1)
在实际应用中,因影像属于离散的栅格数据,无法直接获得变差函数,通常采用下式进行估计,得到实验变差函数,即

(2)
式中:N(h)为计算窗口内间距为h的像元点对个数;h为滞后距离,即2个采样点之间的间隔;Z(pi)和Z(pi+h)分别为区域化随机变量在点pi和(pi+h)处的值;γ(h)通常被称为实验变差函数。
从地统计学的角度来看,遥感影像中像元的灰度值可被视为区域化随机变量。因此,利用变差函数能够有效地描述像元之间的空间相关性,刻画出影像中目标的纹理空间结构信息。变差函数已在影像信息提取中得到广泛应用[9-10]。
1.2 变差函数参数选取
在变差函数纹理特征计算过程中,需要设定窗口尺寸、步长、计算方向等参数。
1)窗口尺寸。窗口尺寸必须适宜,太小会对地物目标空间结构的变异性无法准确表达,从而对特征无法有效地进行描述; 太大则会增加计算量,包含过多的冗余信息。本文首先基于居民区样本计算得到相应的变差函数曲线,提取变程值a; 然后依据经验性规则,得到较适宜的窗口尺寸范围为3a~5a; 再结合实际影像的分辨率和地物目标的尺寸,确定最终的窗口大小(亦即后续格网划分的尺寸)。
2)步长。依据本文提出的纹理差值曲线,选取最优的计算步长(详见1.4)。
3)计算方向。由于变差函数具有各向异性,为了消除方向性对计算结果的影响,本文采用全向变差函数,即使用0°,45°,90°和135°方向上的变差函数值的均值作为全向变差函数值。
1.3 影像特征计算
目前,利用变差函数计算纹理特征时,大多采用基于像元的邻域窗口方法。该方法需要遍历整景图像,计算量较大; 尤其对高分遥感影像来说,为了获取居民区等大尺度目标的完整纹理空间结构,计算过程中设定的窗口尺寸往往会更大,造成计算量大增、处理效率降低。同时,高分影像中居民区目标空间结构的复杂性也会对各像元空间结构的准确建模提出挑战。事实上,针对高分影像中大尺度目标的分割提取,准确构建各像元的空间结构往往也是不必要的,而格网划分的计算方式更加适用于这类典型目标的提取。
本文采用基于格网划分的影像特征快速计算方法。首先,依据1.2节中的方法选择适宜的划分尺寸对原始影像进行规则格网划分,以划分后的格网单元作为后续影像处理基本对象; 然后,对各格网单元分别计算变差函数曲线,提取相应的曲线参数作为纹理结构特征,并将该特征赋予格网单元中的所有像元。由于将基于各像元的纹理特征计算方式简化为针对少量格网单元的特征计算,故可在很大程度上减少计算量,进而提高影像特征计算效率。
1.4 最优结构特征参数选取
作为影像分类或目标提取过程中的重要环节,纹理结构描述参数的选取将直接影响影像分类(或目标提取)精度。现有的结构特征选取方式存在无有效依据以及选取的参数对不同影像数据表现出稳健性与有效性较差的问题。由于结构特征描述参数与不同滞后情况下的变差函数值存在直接或间接的相关性,因此本文以目标与背景的变差函数曲线为依据,通过计算不同滞后情况下目标与背景的变差函数值的差值,得到相应的差值曲线。具体方法为: 选取m个目标样本和n个背景样本,设定最大计算滞后距离s为格网尺寸的一半。首先用式(2)计算各样本在滞后距离为k时的变差函数值Vark,k=1,2,…,s; 然后将对应滞后情况下的目标与背景的变差函数值求差,得到初步差值矩阵Dk,即

(3)
式中:dij=abs(Varik-Varjk);i=1,2,…,m;j=1,2,…,n;Varik和Varjk分别为第i个目标样本和第j个背景样本在滞后距离为k时的变差函数值。
对差值矩阵Dk进一步求取最小值,得到DCk=Min(Dk),DCk反映了在对应滞后情况下目标和背景变差函数值的最小差值; 亦即以变差函数作为结构特征描述参数时,目标和背景在该滞后情况下可区分性的大小。DCk越大,可区分性越好。经进一步计算,得到与各样本变差函数曲线相对应的差值曲线。因此,选取差值曲线中极大值点所对应的变差函数值作为目标的结构特征描述参数,具有明显的合理性。在保证针对不同影像数据参数结构描述有效、稳健的前提下,相对于其他滞后情况下的变差函数值亦为最优。
1.5 高分影像居民区提取
在确定计算方式和参数选取方法后,建立了基于变差函数的高分影像居民区提取的流程(图1)。

图1 居民区提取流程
关键步骤包括: ①依据1.2中的方法,确定适宜的格网划分尺寸,对原始影像进行规则格网划分; ②选取目标和背景样本,计算差值曲线,并根据差值曲线计算样本结构特征; ③依据差值曲线,分别对分割后的格网单元计算结构特征,并基于样本及其对应的特征对支持向量机(support vector machine,SVM)分类器进行训练; ④根据训练后的SVM分类器,对各格网单元进行分类计算,得到居民区初步提取结果; ⑤利用数学形态学的面积阈值和开、闭运算,进一步对提取结果进行后处理; ⑥最终从高分影像中得到居民区提取结果。
2 实验与分析
为了验证本文算法的有效性,选取了4个不同数据来源的高分影像实验区,分别为分辨率为0.61 m的QuickBird实验区1(图2)、分辨率为1.8 m的WorldView2实验区2、分辨率为2.1 m的ZY-3实验区3和Google Earth上分辨率为1.9 m的高分影像实验区4。各实验区的大小分别为645像元×532像元、653像元×580像元、567像元×836像元和1 536像元×1 024像元,均含有居民区和复杂背景2类目标。

图2 实验区1的QuickBird原始影像
在进行格网划分时,依据1.2中的方法,得到4个实验区的较优计算网格尺寸分别为16像元×16像元、20像元×20像元、16像元×16像元和30像元×30像元。本文在不同实验区的差值曲线计算中,分别设定m=3和n=9; 在最优结构特征描述参数选取中,以差值曲线的第一个局部极大值点所对应的变差函数值LagMaxV作为单一结构特征描述参数。同时,考虑到SVM分类器具有抗噪声强、训练速度快、分类精度高等特点,本文采用SVM分类器从高分影像中提取居民区。
在精度评定中,本文以查全率R和查准率P作为参照,以F1测度(根据查准率P和查全率R给出的一个综合评价指标)作为主要的评价依据,相应的定义分别为

(4)
式中:TP为真正类,表示提取的居民区为真实居民区的像元数目;FP为假正类,表示提取的居民区为非居民区的像元数目;FN为假负类,表示提取的非居民区为居民区的像元数目。
首先,利用各实验区样本分别计算对应的差值曲线,实验区1对应的差值曲线如图3所示。

图3 实验区1对应的差值曲线
由图3可以看出,实验区1所对应的差值曲线在第6个滞后值取得局部极大值。类似地,可以计算得到实验区2,3和4分别在第1,3和3滞后值取得的极大值。依据上文方法,选取相应的结构特征描述参数,分别对4个实验区进行基于格网划分和基于像元的居民区提取实验。其中基于像元方法的居民区提取采用了与基于格网方法相同的窗口尺寸和计算滞后距离。在实验区1中,2种方法的居民区提取结果如图4所示。

(a) 基于像元 (b) 基于格网
图4 实验区1居民区提取结果
Fig.4 Results of residential area extraction for experimental zone 1
从图4(b)可以看出,基于格网的居民区提取方法能够很好地保持居民区结构的完整性。图5示出实验区2―4基于格网划分的居民区提取结果。
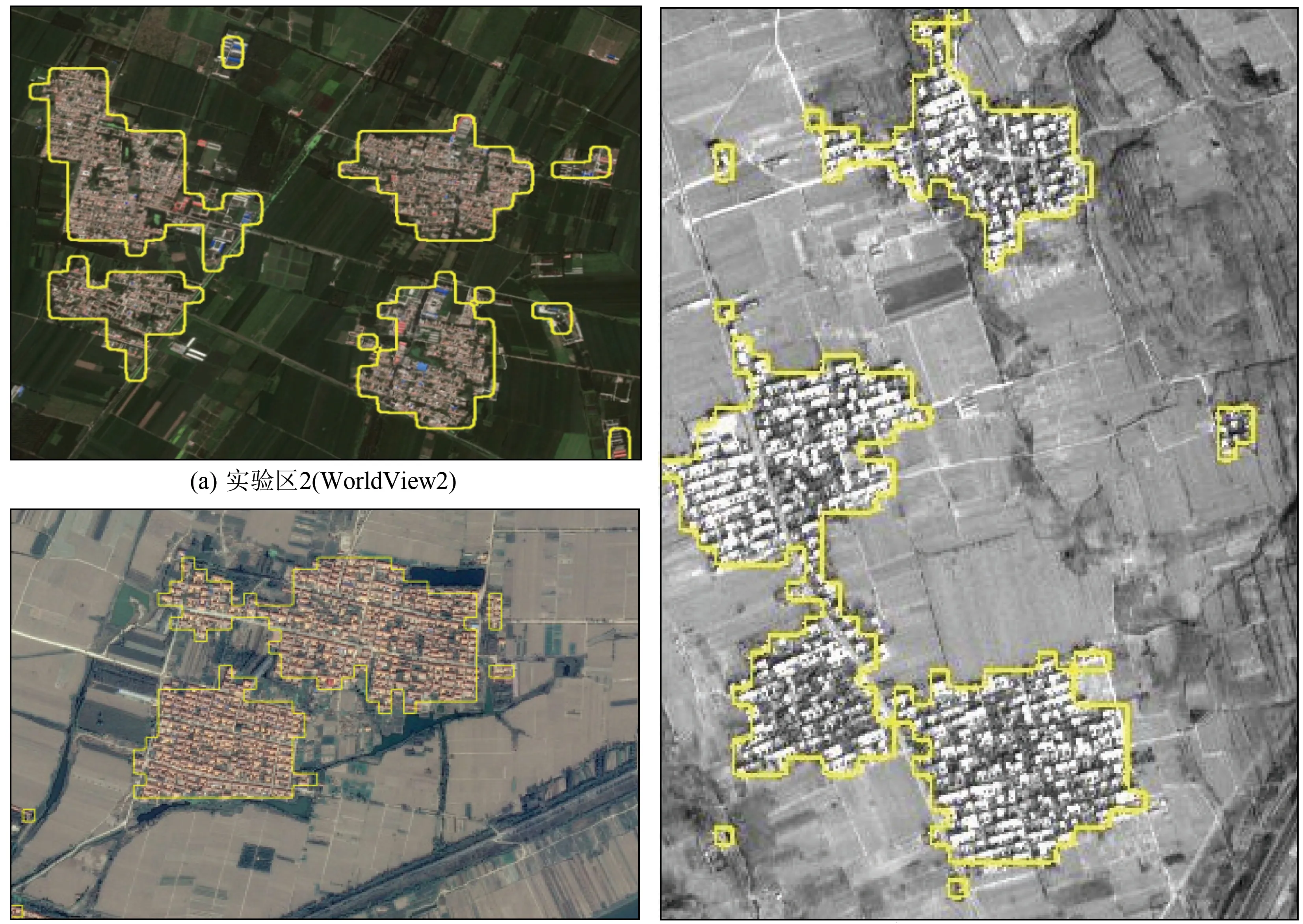
(b) 实验区4(Google Earth) (c) 实验区3(ZY-3)
图5 实验区2―4基于格网的居民区提取结果
Fig.5 Results of residential area extraction based on grid division for experimental zone 2―4
各实验区居民区提取过程中相应的计算成本和提取精度见表1。

表1 不同方法居民区提取的计算成本与分类精度
由表1可以看出,对于基于格网划分的高分影像居民区提取方法,居民区目标的提取精度可以达到82%以上,提取精度基本上可满足大部分应用需求,且计算效率明显优于基于像元的方法。例如实验区2,基于像元方法的居民区提取耗时超过892 s,而利用格网划分方法耗时仅为7.1 s,且后者的居民区提取精度还略高于前者。
为了进一步验证基于本文方法所提取结构特征描述参数的有效性,本文从横向和纵向2个方面进行了评价: ①横向比较。选择目标和背景均具有的通用结构特征参数作为对比对象,将本文提取得到的结构特征描述参数与其进行比较,以验证本文方法提取的结构参数在空间结构描述上的稳健性与有效性; ②纵向比较。将变差函数曲线上不同滞后情况下的函数值分别作为目标的结构参数,以验证本文方法提取的结构特征参数是否为最优。常用的通用结构特征参数包括: 第一滞后变差函数值FLS、一阶差分FD、二阶差分SD、第一个局部极大变差函数值FMaxV、第一个极值点内变差函数均值MFM和第一个极大滞后至最大滞后区间内所有变差函数值的均值Amean等[8]。表2给出了依据不同参数的居民区提取精度。

表2 基于各类结构特征参数的居民区提取精度
①LagMaxV为结构特征描述参数。
1)横向比较。由表2可以看出,对于实验区1和3,通用结构特征参数中FMaxV,MFM及Amean的提取结果较好,实验区2中FLS,MFM及FMaxV的居民区提取结果较好,实验区4中FD,SD和FLS对目标结构的描述更为有效。综合来看,对于不同的影像数据,有效的通用结构特征描述参数不是一致的,结构描述参数的空间结构描述能力的稳健性较差。从表2还可以看出,基于本文方法提取的结构特征描述参数LagMaxV对于不同的数据源均表现出了较好的稳健性与有效性,并且相对通用结构特征参数具有更好的结构描述能力,因而从横向验证了本文方法所提取的特征描述参数的优势。
表3―6给出了4个实验区分别依据变差函数曲线不同滞后对应的变差函数值作为结构特征参数提取居民区结果的精度对比。

表3 实验区1不同滞后下的居民区提取精度

表4 实验区2不同滞后下的居民区提取精度

表5 实验区3不同滞后下的居民区提取精度

表6 实验区4不同滞后下的居民区提取精度
2)纵向比较。由表3―6可以看出,依据本文方法选取的变差函数值,相对于其他滞后下的变差函数值具有更好的空间结构描述能力。对实验区1来说,基于纹理差值曲线获得的第一个局部极大值点位为6,相应的F1测度在第6个滞后点位达到极大值; 实验区2的最优点位为1,提取结果的精度曲线在第1个点位达到了最大值; 实验区3和4均在差值曲线的极值点3处获得了最高的居民区目标提取精度。同时,根据实验结果可以看出,基于差值曲线的方法可以自适应地选取对不同影像数据最为有效的结构描述参数。
根据表2―6的横向与纵向的对比分析可以说明,基于本文方法提取的结构特征描述参数对不同的影像数据均保持了较好的稳健性,在结构特征描述能力上可以与传统的通用结构特征参数相媲美,甚至优于通用结构特征描述参数; 同样,在进行结构描述时,取得的参数相对于变差函数曲线上其他变差函数值更为有效。
3 结论
1)针对高分影像中居民区这类大尺度目标的提取,本文采用基于格网划分和变差函数方法,对原始影像直接进行格网划分,以划分后的格网单元作为影像处理的基本对象,在保证较好的影像居民区提取结果的前提下,使提取的效率得到了很大改善。
2)在格网单元的结构特征参数计算过程中,提出一种基于纹理差值曲线的最优结构特征参数选取方法,使得选取的参数对于不同影像数据空间结构的描述均具有较好的稳健性,结构特征描述能力与传统的通用结构特征参数相当,甚至会优于通用结构特征参数。
3)综合考虑算法的性能和效率,本文提出的基于变差函数和格网划分方法对不同高分影像数据均能有效、快速地提取居民区,具有很好的实用价值。
由于目前还只是依据差值曲线的第一个局部极大值选取对应的变差函数值作为单个结构特征描述参数,故未能对不同滞后情况下的变差函数值进行综合考虑以获得更为有效的特征描述参数; 另外,基于格网划分的影像居民区提取方法,其提取结果的边缘尚存在一定的误差。因此,如何获得更为有效的结构特征描述参数组合,如何进一步细化边缘格网的提取结果,仍需进行深入研究。
[1] 沈小乐,邵振峰,田英洁.纹理特征与视觉注意相结合的建筑区提取[J].测绘学报,2014,43(8):842-847. Shen X L,Shao Z F,Tian Y J.Built-up areas extraction by textural feature and visual attention mechanism[J].Acta Geodaetica et Cartographica Sinica,2014,43(8):842-847.
[2] 李亮,舒宁,王凯,等.融合多特征的遥感影像变化检测方法[J].测绘学报,2014,43(9):945-953. Li L,Shu N,Wang K,et al.Chang detection method for remote sensing images based on multi-features fusion[J].Acta Geodaetica et Cartographica Sinica,2014,43(9):945-953.
[3] Wu S S,Xu B,Wang L.Urban land-use classification using variogram-based analysis with an aerial photograph[J].Photogrammetric Engineering & Remote Sensing,2006,72(7):813-822.
[4] 王燕红,程博,尤淑撑,等.基于改进变差函数的高分辨率SAR图像建筑区提取[J].遥感信息,2014,29(2):3-8. Wang Y H,Cheng B,You S C,et al.Extraction of building areas from high-resolution SAR images based on advanced variogram method[J].Remote Sensing Information,2014,29(2):3-8.
[5] Tonye E,Fotsing J,Zobo B E,et al.Contribution of variogram and feature vector of texture for the classification of big size SAR images[C]//Proceedings of the 7th International Conference on Signal-Image Technology and Internet-Based Systems.Dijon:IEEE,2011:382-389.
[6] Wallace C S A,Watts J M,Yool S R.Characterizing the spatial structure of vegetation communities in the Mojave Desert using geostatistical techniques[J].Computers & Geosciences,2000,26(4):397-410.
[7] Chen Q,Gong P.Automatic variogram parameter extraction for textural classification of the panchromatic IKONOS imagery[J].IEEE Transactions on Geoscience and Remote Sensing,2004,42(5):1106-1115.
[8] 陈一祥.高分影像空间结构特征建模与信息提取[D].武汉:武汉大学,2013. Chen Y X.Modeling of Spatial Strutural Features and Information Extraction for High Resolution Remote Sensing Images[D].Wuhan:Wuhan University,2013.
[9] Carr J R,de Miranda F P.The semivariogram in comparison to the co-occurrence matrix for classification of image texture[J].IEEE Transactions on Geoscience and Remote Sensing,1998,36(6):1945-1952.
[10]董庆,冯林新.变差函数在遥感图像处理中的应用[J].遥感技术与应用,1997,12(1):8-13. Dong Q,Feng L X.The use of the variogram in remotely sensed images[J].Remote Sensing Technology and Application,1997,12(1):8-13.
(责任编辑: 刘心季)
Feature description and extraction of residential area based on variogram function and grid division
ZHANG Enbing, QIN Kun, YUE Mengxue, ZHANG Ye, ZENG Cheng
(SchoolofRemoteSensingandInformationEngineering,WuhanUniversity,Wuhan430079,China)
As an effective method for describing texture structure, variogram has a good application in residential areas extraction from high-resolution remote sensing image. However, nowadays, residential areas extraction methods mostly apply the calculation in pixel level by moving window, thus the computational efficiency tends to be lower when encountering large images. In addition, when describing texture structure characteristics for different data sources, it has a poor robustness and efficiency for selecting parameters. Therefore, the authors propose an effective method for residential area extraction based on variogram function and grid division in this paper. Firstly, the original image was divided into small grid units and then the unit was taken as the processing object;meanwhile, the optimal description parameters were selected based on the texture difference curve. Finally, the calculated texture characteristics were used to extract residential areas. The experimental results show that the proposed method has better spatial structure description capability and calculation efficiency.
variogram; grid division; residential areas; robustness; texture difference curve; spatial structure
10.6046/gtzyyg.2016.04.23
张恩兵,秦昆,岳梦雪,等.基于变差函数和格网划分的居民区特征描述与提取[J].国土资源遥感,2016,28(4):149-155.(Zhang E B,Qin K,Yue M X,et al.Feature description and extraction of residential area based on variogram function and grid division[J].Remote Sensing for Land and Resources,2016,28(4):149-155.)
2015-05-25;
2015-07-28
国家重点基础研究发展计划(973)项目“高分辨率遥感影像的目标特征描述与数学建模”(编号: 2012CB719903)、国家科技支撑计划项目“地理国情监测科技支撑”(编号: 2012BAJ15B04)和四川省测绘地理信息局科技计划项目“城市三维建模”(编号: J2014ZC02)共同资助。
TP 751.1
A
1001-070X(2016)04-0149-07
张恩兵(1990-),男,硕士研究生,主要研究方向为高分辨率遥感图像信息提取。Email: zeb@whu.edu.cn。