采用变时域监督预测控制的机炉协调控制方法
2016-12-22谈博蔡远利史椸
谈博,蔡远利,史椸
(西安交通大学电子与信息学院,710049,西安)
采用变时域监督预测控制的机炉协调控制方法
谈博,蔡远利,史椸
(西安交通大学电子与信息学院,710049,西安)
针对机炉协调控制系统中负荷变动时传统PID控制效果不佳、机组运行经济效益降低甚至影响系统安全状况的问题,提出一种采用变时域监督预测的机炉协调控制方法(VDMC)。首先根据所分析的超临界直流炉的机理特性,建立随煤质波动的变参数模型;再结合实际工况确定的约束条件以及电网频率的扰动,采用带监督环节的多变量受约束预测控制算法来解决控制框架中分散和集中的平衡性;最后基于变时域的思想,改善了机炉协调控制的整体性能。实验结果表明,与传统PID控制方法和固定时域预测控制方法相比,所提出的VDMC方法的相对误差均值降低了20%左右,有效提升了机炉协调控制品质,确保了系统安全稳定运行。
机炉协调控制;预测控制;监督;变时域
我国电力工业持续健康发展,装机总量及发电总量稳步增长。由于随机性的清洁能源广泛应用、超/特高压交直流的远程输电以及大型电源基站建设,使得电网频率的波动愈加频繁。现阶段,我国电网结构依然以火力发电为主,广泛运行的超超临界机组的发电效率达到43%~48%。在输配电端,随着自动发电控制系统(automatic generation control,AGC)的应用,窝电现象大幅度降低。火电机组协调控制系统作为联接电网与单元机组的关键环节,对于保证电网频率的质量及稳定性有至关重要的作用[1]。
超超临界机组采用直流锅炉,由于没有固定的蒸发分界面,因而机组模型具有非线性、大惯性、参数时变等特点。同时,锅炉和汽轮机的各变量相互耦合,存在快速响应的汽轮机控制和反应延迟的锅炉控制之间的配合问题,这些都造成超超临界机组的协调控制更加复杂,传统PID控制已不能满足要求。文献[2-3]提出了单元机组协调控制系统模型,模拟了协调控制、直接能量平衡等火电机组的动态特性,然而这种模型未考虑电网频率、燃煤品质等扰动,容易造成模型失配。目前,大多数火电机组协调控制采用负荷指令前馈+PID反馈等常规手段,文献[4]提出一种PID控制器参数自整定的方法,其结果明显优于经验整定所得,但在大范围负荷变动时无法满足要求。为了解决此问题,研究者们采用最优控制、模糊控制、解耦控制、预测控制等方法来分析这一难题,其中预测控制方法在工业多变量复杂系统中已成功应用。文献[5]采用模型预测控制(model predictive control,MPC)中的动态矩阵控制(dynamic matrix control,DMC)算法,提出了一种火电机组自适应模型,但是未考虑整体控制框架。文献[6]给出一种基于阶跃响应的多变量约束预测控制算法,通过在线优化改进控制效果,但文中没有研究预测时域的选取对于控制精度及鲁棒性的影响。
结合实际运行特性,本文先建立了一种自适应煤质的变参数模型,并且运用带监督环节的多变量受约束动态矩阵控制算法,使整体控制框架更加均衡。进一步,本文提出了一种变时域的多变量受约束动态矩阵控制方法,以机组协调控制系统为对象,确保实际的机组负荷和主汽压力能够迅速响应目标设定值。仿真实验表明,该方法预测输出的精度和稳定性有了显著的改善。
1 系统模型及分析
在火电厂中,机炉协调控制系统根据电网需求,实时调节机组负荷,保证主汽压力和主汽温度在安全范围内。
1.1 机炉协调模型
超超临界单元机组的机炉协调模型是一个多输入多输出的复杂控制对象,各变量之间存在相互耦合性。其中,影响单元机组运行参数的主要变量有被控制的机组功率和主汽压力以及可调节的汽机调门开度和锅炉给煤量。因此,本文根据经典的两输入两输出模型[2],并结合河南某660 MW超超临界机组的机理特性,将两输入两输出近似为线性模型,则该模型的传递函数可表示为
(1)
(2)
(3)
(4)
(5)
式中:ΔNe是机组负荷变化量;ΔPt是主汽压力变化量;ΔUt是汽机调门开度变化量;ΔUb是给煤量变化量;GNb,L和GNb,H分别是指煤质较差和煤质较好时的传递函数;GNb是入炉煤量与机组负荷之间的传递函数;GNu是汽机调门开度与机组负荷之间的传递函数;GPb是入炉煤量与主汽压力之间的传递函数;GPu是汽机调门开度与主汽压力之间的传递函数。系统模型的参数可利用历史运行数据,通过遗传算法或最小二乘法等系统辨识的方法计算得到[7-8]。
本机组采用以锅炉跟随为基础的协调控制方式,当负荷指令变化时,汽机主控改变调门开度,从而迅速响应期望负荷,并通过锅炉主控调整给煤量来满足机前主汽压力。机组的目标负荷可以由操作员手动设定或者投入AGC方式后接受中调的负荷指令,同时设定机组负荷的上、下限制和速率限制作为机组的负荷指令信号。
1.2 系统预测模型
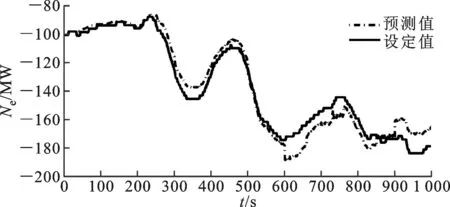
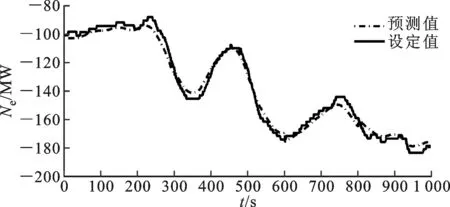
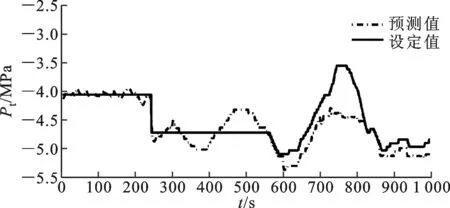
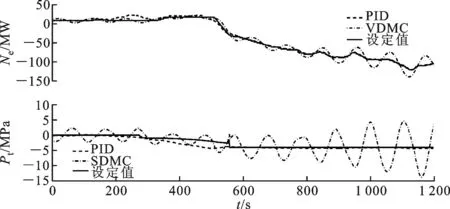
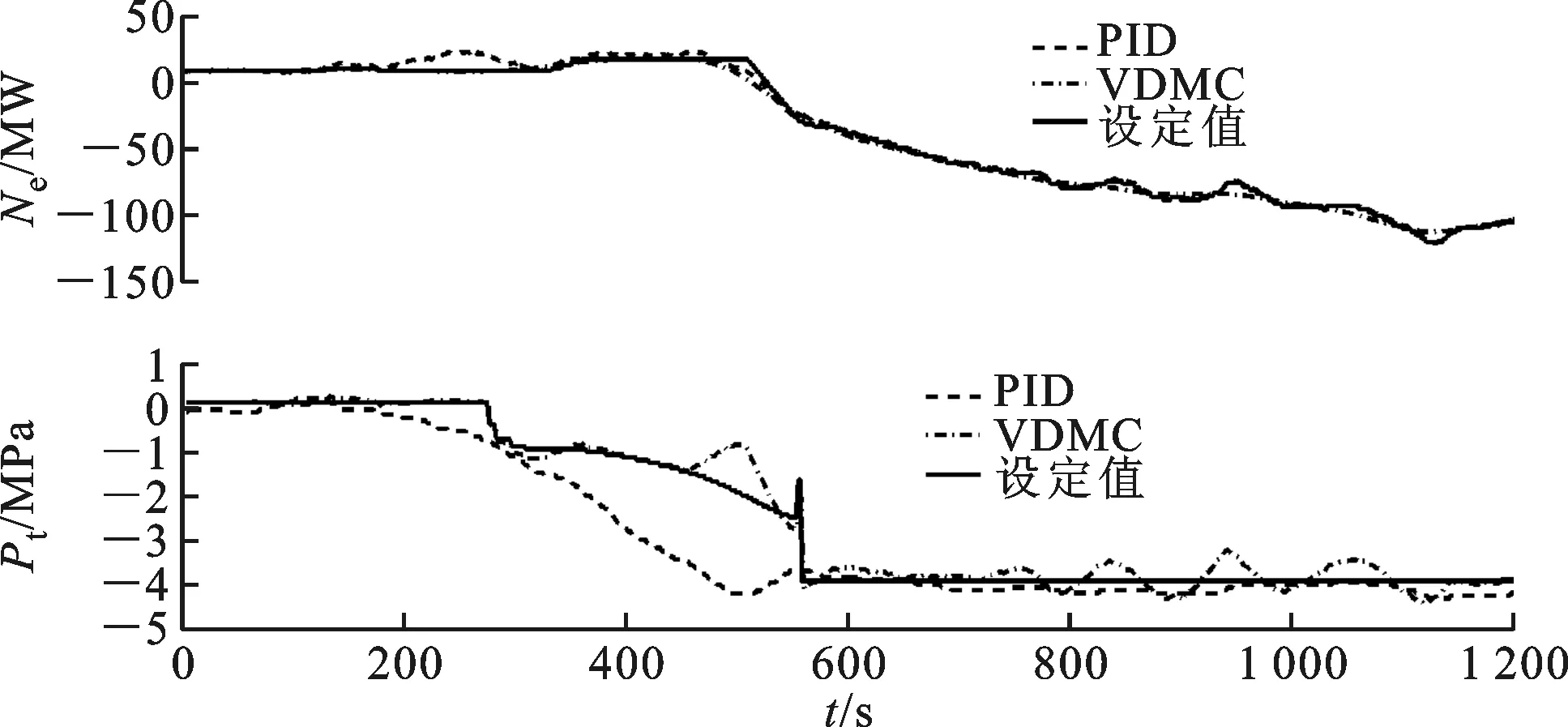
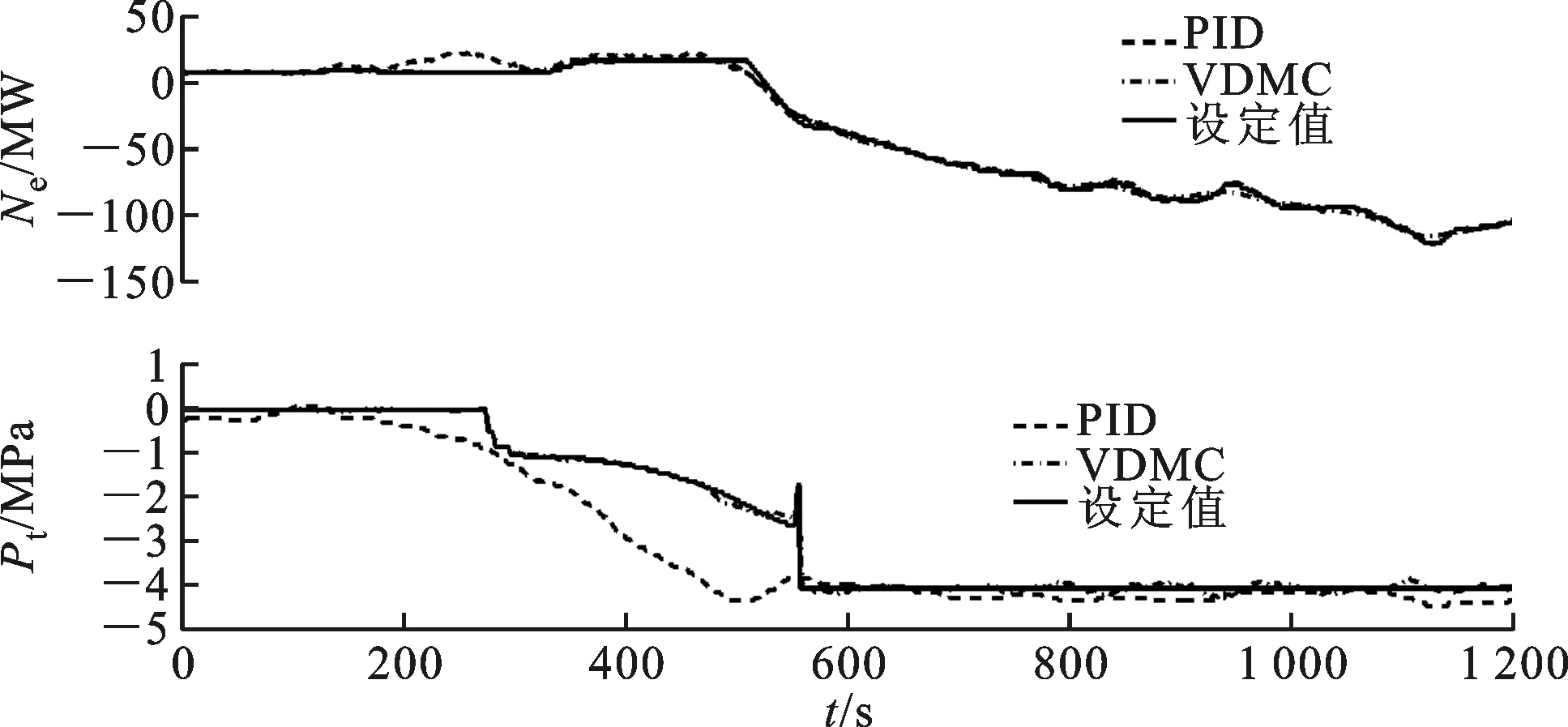
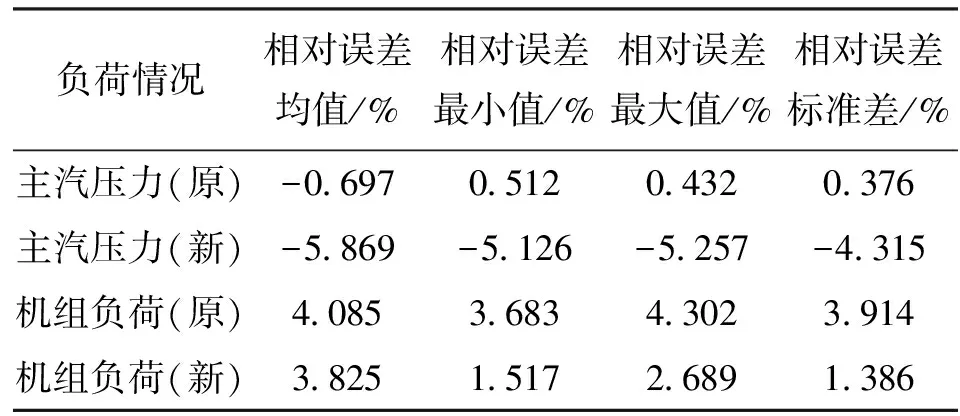
通过分析前面的系统模型,本文采用非参数类的阶跃响应模型来描述两输入两输出被控对象的特性[9]。假设在当前时刻k系统模型的预测时域为T,控制时域为M,且满足M (6) 式中:ynP0(k)表示k时刻对于未来P个时刻的预测初始值;A为模型参数,是阶跃响应的系数矩阵;ΔuM(k)为控制增量。合并所有控制增量ΔuM(k),从而计算得到预测值yf(PM)。对于本文两输入两输出模型,模型的预测输出为 (7) 式中:yfPM(k)为k时刻有Δu(k)作用后,未来P个时刻的模型预测输出向量。 在k时刻,模型预测的初始值为 (8) 式中:ynP0(k)为k时刻无Δu(k)作用时,未来P个时刻的模型预测初始向量。 预测模型的参数矩阵为 (9) 控制增量表示为 (10) 2.1 动态矩阵控制算法 本文采用一种新的动态矩阵控制(dynamic matrix control,DMC)算法[11],并应用到机炉协调控制系统中。在上节预测模型的基础上,考虑实际约束条件,采取尽可能平稳的控制措施,进而实现输出误差的最小化[12]。此过程可归纳为二次规划的优化问题,即求取下式的最优值 (11) (12) 式中:w(k)是设定的输出值;Q为误差权矩阵,对应输出偏差;R为控制权矩阵,对应输入增量。 若存在延迟时间τ,当k<τ时,误差权矩阵Q的系数为0;当k≥τ时,Q的选取由被控制量的实测值与期望值的偏差决定。控制权矩阵R的作用是通过调整各控制增量的权重来权衡整个系统的动态特性和鲁棒性。 由于实际系统存在着参数时变、模型失配等扰动,DMC预测模型需要通过下式的反馈校正,从而进一步提高滚动优化的效果。 ycor(k+1)=yf(k)+He(k+1) (13) yP0(k+1)=S0ycor(k+1) (14) 式中:ycor(k+1)为经过校正后的输出向量;H为校正误差权矩阵;e(k+1)为模型输出偏差向量;S0为上三角的移位矩阵。 将式(12)整合为线性不等式形式(式(15)),则得到包含约束条件的DMC优化指标为 (15) 式中:X=2(ATQA+R);l=-2ATQ[w(k)-ynP0(k)];矩阵F和向量β为集成系统所有的硬约束;ε为常数。式(15)为受约束的线性二次型最优控制问题,从凸体顶点的角度出发,通过调整目标函数,将可行域外的最优解转化为可行域内的映射,可以很好地解决约束问题[13-14]。 2.2 带监督环节的动态矩阵控制算法 在火电机组中,整个机炉协调控制系统可以划分为多个功能子级系统组成。当机组处于稳态运行时,使用传统的分散PID控制框架就可以获得良好的效果,但工况发生剧烈扰动(如给水量、风量、煤质、炉膛负压等)时,原有控制方案不能快速准确动作。因而,本文将模型预测控制中的DMC算法引入机炉协调控制中,从而解决工况变动时的控制难题,但增加了计算的复杂程度,并影响系统的可靠性、稳定性[15-17]。 图1 本文VDMC控制方法的机炉协调系统简图 基于上述问题,本文设计了一种双层结构的控制方法应用在机炉协调控制系统,如图1所示。受约束的监督动态矩阵控制器(supervisory dynamic matrix control,SDMC)位于上层,集中优化稳态目标;下层是分散PID控制器组成的动态控制层,其功能是将上层的稳态输出作为设定值,使每一子系统能够迅速跟踪期望目标。具体到机炉协调控制系统,上层稳态部分是将单元机组的负荷、热循环及燃烧效率等指标集中优化计算,在满足约束条件的前提下,实时求解出最优的给煤量和汽机调门开度。下层动态控制通过汽机主控和锅炉主控PID回路,确保机组的给水量、给煤量、总风量、进汽量及负荷等能够迅速精准的响应,从而提升系统的总体动态特性。为确保可靠通信及稳定性,系统需要增加监督环节,将电网频率及煤质波动作为反馈的扰动。当电网频率超过死区时,一次调频回路迅速动作,为避免协调控制的影响,监督环节闭锁反向负荷指令。若实际频率过高,闭锁增负荷指令;若实际频率过低,闭锁减负荷指令。另外,如果出现数据采集系统通信故障或者预测输出异常时,上层稳态控制由SDMC控制器切换回原有的PID回路,确保系统处于安全,从而避免系统出现不稳定。 2.3 变时域监督动态矩阵控制算法 经过更深层的研究,预测时域T的选取直接影响预测控制的效果,若T值过大,预测精确不够;若T值太小,鲁棒性变差。本文提出一种变时域监督动态矩阵控制(variable horizon supervisory dynamic matrix control,VDMC)方法,将其应用于机炉协调控制系统中。为确保系统稳定,预测时域需满足以下条件: (1)必须超过受控对象的时滞部分; (2)不包含非最小相位特性引起的反向部分; (3)覆盖动态响应主体,且大于控制时域M。 设采样时间为Ts,则相对预测误差εs为 (16) 假设给煤量不变,由汽机调门开度来满足负荷需求,选取不同预测时域,预测输出的相对误差平均值如表1所示。 表1 不同预测时域的相对预测误差平均值 由表1可见,随着预测时域增加,输出误差越大。兼顾控制精度及安全稳定,本文的预测时域随时间变化。在k时刻动态最优,目标函数为 (17) (18) 式中:v为常数;h为预测误差变化率。根据不同预测时域的仿真结果确定适当的阈值λ及死区ζ(λ,ζ>0且λ>ζ)。当|h|≤λ时,预测时域为T1;当|h|>λ时,预测时域为T2(T2>T1)。本文提出的变时域方法按照如下步骤选取预测时域: (1)预测时域选取T1,使系统快速响应; (2)选取适当的λ、ζ,计算k时刻的变化速率h,若|h|≤λ,迭代计算k+1时刻的变化速率h; (3)为防止频繁切换扰动,持续50个采样周期出现|h|>λ,预测时域选取T2,确保系统稳定; (4)考虑死区ζ,持续100个采样周期出现|h|≤λ-ζ,恢复预测时域为T1; (5)重复第2步,并初始化阈值λ。 为了减少在线计算量,控制时域M选取1,根据文献[10]中的定理3.2可知,误差权系数矩阵Q=I,M=1时,无论阶跃响应系数{ai}是何种形式,选择充分大的预测时域一定能获得稳定的控制器。预测时域T2足够大,并超越模型时域N使得ai的后半部分趋近于稳态值aN。此时控制器趋近于比例环节1/aN,确保了系统闭环稳定性。 同时,预测时域实际变动时考虑适当的权重,实质是一种多模型切换过程。若预测时域选取T2,系统处于稳定状态,设置合适的权值范围即可保证预测时域切换过程中系统具有渐近稳定性,以实现控制系统的平稳切换[18]。 在保证系统闭环稳定及平稳切换的前提下,预测时域实时选择,提升了生产自动化水准。 为了验证本文提出的变时域监督动态矩阵控制方法的可行性及效果,本文采用河南某660 MW机组的历史数据,通过仿真得到传统PID、SDMC以及VDMC控制方法的预测结果,比较各控制方法的优劣性能。该机组为超超临界直流炉,分散控制系统采用艾默生Ovation系统,主汽压力、负荷、给煤量和调门开度等实验数据的采样周期为1 s。仿真PC机采用i5 2520M 2.5 GHz CPU及4 GB内存,整个实验仿真过程采用Matlab 7.11软件。 3.1 参数选择 发电煤耗是每千瓦时电量所耗标准煤量。其中,机组设计发电煤耗为bfs,实际发电煤耗为bfn,煤质校正系数为 (19) 当η>1时,判断煤质较差,系统模型取GNb,L;当η≤1时,判断煤质较好,系统模型取GNb,G;η的死区为±0.03。本文利用实时监测的煤质校正系数,自适应选取模型参数[19]。 3.2 仿真实验与分析 根据现场工况设定约束条件,本机组额定功率为660 MW,额定主蒸汽压力为25.4 MPa,负荷变化率不大于10 MW/min,给煤量小于230 t/h,汽机调门开度处于±105之间。传统PID控制参数凭借现场经验整定得到,因而本文不做详述。 首先,选取煤质发生改变时的历史数据,机组负荷变动范围为450 MW~530 MW,运用随煤质波动的变参数模型和固定参数模型进行实验仿真,分别得到机组负荷、主汽压力的输出值并与设定值比较,模型输出响应曲线如图2所示。 由图2可知,当燃煤品质发生变化时,固定参数模型出现失配现象,造成模型精度降低。与此相比,变参数系统模型解决了上述问题,有利于精细化控制器建立。 (a)固定参数模型 (b)变参数模型 (c)固定参数模型 (d)变参数模型图2 固定/变参数模型输出响应曲线 其次,选取机组负荷变动时的历史数据,机组负荷从630 MW至430 MW的下降过程。采用本文所提出的固定时域监督预测控制方法以及变时域监督预测控制方法进行实验仿真,并与传统PID控制结果比较,得到图3~图5的输出曲线。其中,图3、图4对应不同预测时域的系统动态响应曲线,图5是变时域监督预测控制系统的动态响应曲线。 图3 T=8 s时2种控制方法的响应曲线 图4 T=20 s时2种控制方法的响应曲线 图5 变时域下2种控制方法的响应曲线 由图3可知,当预测时域过小时,控制量变化剧烈,导致系统输出的动态响应过快,出现不稳定现象。由图4可知,当预测时域偏大时,控制系统稳定,但是当前系统输出的动态输出响应跟随设定值的过程偏慢,控制精度大大降低。 由图5可知,选取时变的预测时域,与传统PID以及图3、图4的VDMC控制方法预测输出对比,本文VDMC控制方法效果明显提升,动态响应既保持稳定,也很好地跟随期望设定值。传统PID输出、VDMC预测输出与设定值的估计误差分析结果如表2所示。 表2 负荷变动时预测输出的估计误差表 通过分析超超临界单元机组的机理特性,本文得到随煤质波动的两输入两输出变参数模型,并结合实际工况,确定系统约束条件,运用带监督环节的多变量受约束预测控制算法(SDMC),解决整体控制框架中分散和集中的平衡性。为了兼顾系统的稳定性和动态响应速率,本文提出一种变时域监督预测控制(VDMC)方法,并应用到机炉协调控制系统中。实验结果表明,与其他控制算法相比,本文所提方法预测输出的相对误差平均值降低了20%左右,控制效果有了显著提高。本文方法在实际机组中获得了初步应用,由于现场数据采集困难及保密的原因,文中仅给出部分仿真实验结果。 [1] ÅSTRÖM K J, BELL R D. Drum boiler dynamics [J]. Automatica, 2000, 36(3): 363-378. [2] 闫姝, 曾德良, 刘吉臻, 等. 直流炉机组简化非线性模型及仿真应用 [J]. 中国电机工程学报, 2012, 32(11): 126-134. YAN Shu, ZENG Deliang, LIU Jizhen, et al. A simplified non-linear model of a once-through boiler-turbine unit and its application [J]. Proceedings of the CSEE, 2012, 32(11): 126-134. [3] MOON U C, LEE K Y. Step-response model development for dynamic matrix control of a drum-type boiler-turbine system [J]. IEEE Transactions on Energy Conversion, 2009, 24(2): 423-430. [4] 陈星, 李东海. 一类热工过程分布参数模型的PID控制仿真研究 [J]. 系统仿真学报, 2008, 20(9): 2382-2386. CHEN Xing, LI Donghai. Simulation analysis on PID control of distributed parameter model in thermal process [J]. Journal of System Simulation, 2008, 20(9): 2382-2386. [5] CHAN K H, DOZAL-MEJORADA E J, CHENG X, et al. Predictive control with adaptive model maintenance: Application to power plants [J]. Computer and Chemical Engineering, 2014, 70: 91-103. [6] 王国良, 阎威武, 陈世和, 等. 1 000 MW超超临界机组的多变量约束预测控制的研究 [J]. 控制理论与应用, 2012, 29(12): 1573-1578. WANG Guoliang, YAN Weiwu, CHEN Shihe, et al. Multivariable constrained predictive control of 1 000 MW ultra supercritical once-through boiler-turbine system [J]. Control Theory & Application, 2012, 29(12): 1573-1578. [7] 叶青, 朱永强, 李红贤. 基于改进遗传算法电力系统仿真软件间模型参数转换研究 [J]. 电力系统保护与控制, 2015, 43(9): 95-100. YE Qing, ZHU Yongqiang, LI Hongxian. Model parameter conversion between power system software based on IGA [J]. Power System Protection and Control, 2015, 43(9): 95-100. [8] GHEZELAYAGH H, LEE K Y. Application of genetic algorithm in extraction of fuzzy rules for a boiler system identifier [C]∥Proceedings of the IEEE Power Engineering Society Transmission and Distribution Conference. Piscataway, NJ, USA: IEEE, 2001: 1203-1208. [9] PICHLER M F, LERCH W, HEINZ A, et al. A novel linear predictive control approach for auxiliary energy supply to a solar thermal combistorage [J]. Solar Energy, 2014, 101: 203-219. [10]席裕庚. 预测控制 [M]. 2版. 北京: 国防工业出版社, 2013: 10-39. [11]邹涛, 魏峰, 张小辉. 工业大系统双层结构预测控制的集中优化与分散控制策略 [J]. 自动化学报, 2013, 39(8): 1366-1373. ZHOU Tao, WEI Feng, ZHANG Xiaohui. Strategy of centralized optimization and decentralized control for two-layered predictive control in large-scale industrial systems [J]. Acta Automatica Sinica, 2013, 39(8): 1366-1373. [12]EDLUND K, BENDTSEN J D, JØRGENSEN J B. Hierarchical model-based predictive control of a power plant portfolio [J]. Control Engineering Practice, 2011, 19(10): 1126-1136. [13]于洋, 许鋆, 罗雄麟. 预测控制约束边界效应与解决方法研究 [J]. 自动化学报, 2014, 40(9): 1922-1932. YU Yang, XU Jun, LUO Xionglin. Constraints boundary effect in model predictive control and corresponding solutions [J]. Acta Automatica Sinica, 2014, 40(9): 1922-1932. [14]何德峰, 宋秀兰, 黄骅. 优先级多目标稳定化约束模型预测控制 [J]. 控制与决策, 2013, 28(12): 1831-1836. HE Defeng, SONG Xiulan, HUANG Hua. Stabilizing constrained model predictive control with prioritized multi-objectives [J]. Control and Decision, 2013, 28(12): 1831-1836. [15]SHIROEI M, RANJBAR A M. Supervisory predictive control of power system load frequency control [J]. International Journal of Electrical Power and Energy Systems, 2014, 61: 70-80. [16]WU Xiao, SHEN Jiong, LI Yiguo, et al. Hierarchical optimization of boiler-turbine unit using fuzzy stable model predictive control [J]. Control Engineering Practice, 2014, 30(9): 112-123. [17]MCLARTY D, CIVIT-SABATE C, BROUWER J, et al. Micro-grid energy dispatch optimization and predictive control algorithms: a UC Irvine case study [J]. International Journal of Electrical Power and Energy Systems, 2015, 65: 179-190. [18]LIAN J, ZHANG K. Exponential stability for switched Cohen-Grossberg neural networks with average dwell time [J]. Nonlinear Dynamics, 2011, 63(3): 331-343. [19]杨婷婷, 曾德良, 王玮. 大型燃煤发电机组煤质实时校正方法 [J]. 电站系统工程, 2010, 26(5): 7-10. YANG Tingting, ZENG Deliang, WANG Wei. Real-time coal quality correction method for large coal-fired power unit [J]. Power System Engineering, 2010, 26(5): 7-10. [本刊相关文献链接] 薛洪武,吴爱国,董娜.制冷系统自抗扰解耦控制.2016,50(9):85-90.[doi:10.7652/xjtuxb201609014] 朱芳来,蒋鹏,李晓航.基于T-S模糊模型的观测器和动态输出反馈容错控制器设计.2016,50(9):91-96.[doi:10.7652/xjtuxb201609015] 郭森,秦贵和,张晋东,等.多目标车辆路径问题的粒子群优化算法研究.2016,50(9):97-104.[doi:10.7652/xjtuxb2016 09016] 李国梁,张合新,周鑫,等.状态反馈事件触发控制系统的分析与设计.2016,50(5):146-150.[doi:10.7652/xjtuxb201605 022] 杨航,刘凌,阎治安,等.双闭环Buck变换器系统模糊PID控制.2016,50(4):35-40.[doi:10.7652/xjtuxb201604006] 张蕾,张爱民,景军锋,等.静止无功补偿器与发电机励磁系统的自适应鲁棒协调控制策略.2015,49(11):96-101.[doi:10.7652/xjtuxb201511016] 卜祥伟,吴晓燕,张蕊,等.双曲正弦非线性跟踪微分器设计.2015,49(1):107-111.[doi:10.7652/xjtuxb201501018] 俞珏,庄健,于德弘.采用李雅普诺夫函数的电液伺服系统反馈线性化控制.2014,48(7):71-76.[doi:10.7652/xjtuxb 201407013] 许建,张政,李翔,等.独立驱动电动汽车横摆力矩的模糊控制算法.2014,48(7):83-89.[doi:10.7652/xjtuxb201407015] 赵金磊,曹军义,马澄斌,等.空空导弹的系数图鲁棒控制设计.2013,47(11):70-75.[doi:10.7652/xjtuxb201311013] 徐小艳,管晓宏,李黎.建筑空调系统最优停机时间预测与控制.2013,47(10):31-36.[doi:10.7652/xjtuxb201310006] 晁武杰,甘永梅,王兆安,等.实时状态树结构模型的最优非阻塞模块化监督控制研究.2013,47(4):86-91.[doi:10.7652/xjtuxb201304015] 时建明,王洁,王琨,等.吸气式高超声速飞行器纵向运动反演控制器设计.2013,47(3):102-107.[doi:10.7652/xjtuxb 201303019] (编辑 刘杨) A Coordination Control Method for Turbine-Boiler Systems Based on Supervisory Predictive Control with Varying Horizon TAN Bo,CAI Yuanli,SHI Yi (School of Electronic and Information Engineering, Xi’an Jiaotong University, Xi’an 710049, China) A varying horizon supervisory predictive control algorithm (VDMC) is proposed to deal with the problem that the traditional PID controller is insufficient in coordination control systems (CCS), leading to lower economic benefit of power units or even affecting system safety during load changing. Firstly, a time-varying parameter model with fluctuation of coal quality is established through the analysis of mechanism characteristics of supercritical boilers. Then, a multivariable constrained supervisory predictive control algorithm is then used to solve the balance problem of centralization and decentralization in the control frame by taking constraint conditions determined by the actual situation and the disturbance of power grid frequency into account. Finally, the overall performance of the coordination control for turbine-boiler system is improved based on the idea of varying horizon. Simulation results and comparisons with the traditional PID and the fixed horizon predictive control algorithm show that the mean value of relative errors of the proposed method is reduced by about 20% during the load changing period. The method enhances the quality of turbine-boiler coordination control and makes the system more stable. turbine-boiler coordination control; predictive control; supervision; varying horizon 2016-04-30。 作者简介:谈博(1989—),男,博士生;蔡远利(通信作者),男,教授,博士生导师。 基金项目:国家自然科学基金资助项目(61308120,61463029)。 时间:2016-10-10 10.7652/xjtuxb201612015 TP273 A 0253-987X(2016)12-0092-07 网络出版地址:http: ∥www.cnki.net/kcms/detail/61.1069.T.20161010.1815.010.html2 动态矩阵控制算法的改进及应用


3 实验仿真

4 结 论
