油茶果采摘机器人采摘头设计与分析
2016-12-21高自成李立君王朋辉罗玉坤
高自成,李立君,王朋辉,祝 强,罗玉坤
(中南林业科技大学 机电工程学院,湖南 长沙 410004)
油茶果采摘机器人采摘头设计与分析
高自成,李立君,王朋辉,祝 强,罗玉坤
(中南林业科技大学 机电工程学院,湖南 长沙 410004)
油茶是一种重要的油料树种。随着我国油茶种植面积的增长,油茶果机械化与自动化采收成为人们关注的热点问题。本文论述了油茶果采摘机器人采摘头的结构设计,并利用Inventor软件对采摘头进行了力学仿真和关键零件有限元分析试验。试验结果表明,最大应力值随振幅和频率增大而增大;振动频率对采摘头关键零件最大应力值影响较大,短连杆和曲柄最大应力值最高,但仍小于材料的屈服强度,结合采摘头现场工作试验,验证了油茶果采摘机器人采摘头的可行性和安全性。
采摘头,结构设计,力学分析,采摘机器人,油茶果
油茶是一种木本油料树种,与油橄榄、油棕、椰子并称“世界四大木本油料树种”[1]。茶油是油茶种子中提取获得的油脂,具有重要的药用价值[2-4],是一种对人体有益的保健型营养油[5-6],受到广大群众的青睐,市场需求巨大[7-8]。
我国的油茶品种、分布范围及油茶产量均居于世界首位[9]。据国家林业局统计,我国的油茶产量已经从2008年的20多万吨增加到了2012年的45万吨,产值由110亿元增加到了390亿元[10]。随着油茶种植的面积增长,传统的人工采收方式由于存在劳动量需求大,成本高,作业效率低等缺陷[11],已经无法满足其规模化和产业化需求。油茶果采收机械化与自动化成为人们关注的热点问题[12-14]。针对这一现状,设计了油茶果采摘机器人。
本文论述了油茶果采摘机器人采摘头的结构设计[15-17],并利用Inventor软件对采摘头进行了力学仿真和关键零件有限元分析[18-19]。
1 采摘头结构设计
如图1所示,油茶果采摘机器人采摘头由夹紧组件和振动组件构成,其工作方式为振动采摘。
夹紧组件包括小锥齿轮、大锥齿轮、丝杠花键轴、夹紧螺母、夹紧拉杆和夹爪。夹紧机构由伺服电机提供动力,通过锥齿轮传动换向后,由大锥齿轮内花键孔与丝杠花键轴形成的花键副驱动丝杠花键轴转动,再通过丝杠花键轴末端的梯形丝杠副带动夹紧螺母前后移动[20]。夹紧螺母与夹紧拉杆、夹爪构成以滑块为主动件的曲柄滑块机构[21],从而驱动夹爪张开或夹紧,达到夹持枝干的目的。
振动组件为振动曲柄、振动连杆和与振动导轨固连的夹紧组件构成的曲柄滑块机构,其工作动力由伺服电机提供。为了便于调节振幅大小,振动曲柄添加了振幅调节机构;考虑到加工误差影响和安装、维护的便捷,本文论述的采摘头振动连杆由长连杆和短连杆组成。采摘头三维模型如图2所示,技术参数如表1所示。
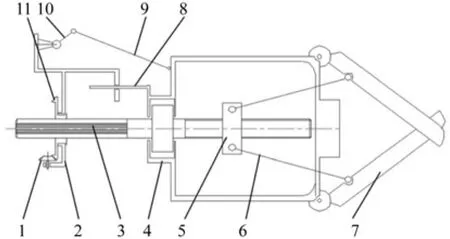
图1 采摘头结构简图Fig.1 The structure diagram of picking monomers
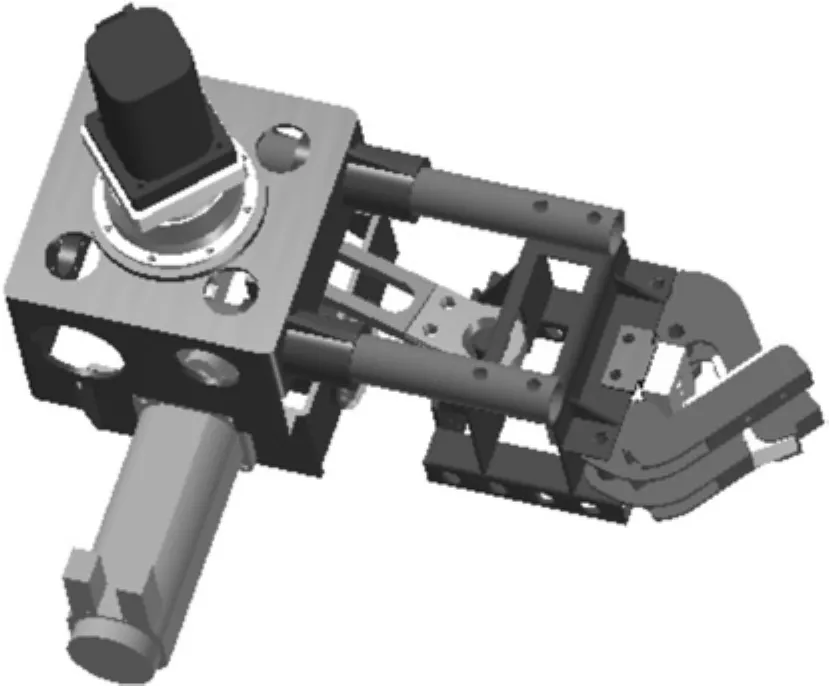
图2 采摘头3D模型Fig.2 The 3D Model of picking monomers
2 试验方法与结果
通过多次实地考察与实验,发现挂果较好的油茶树树干直径分布在25 mm~45 mm,振动树干所需推力约为150 N~510 N。本次试验目的为通过模拟实地振动采摘作业过程,分析采摘头关键零件在作业时所受的最大应力值,故本次试验取最大推力值510 N。
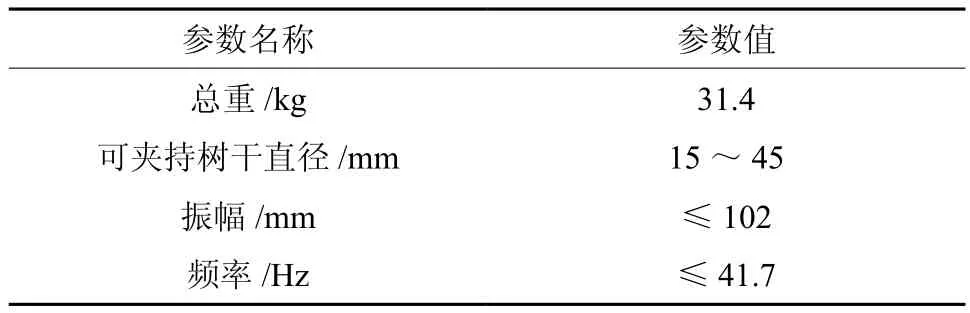
表1 采摘头技术参数表Table 1 The technical parameter table of picking monomers
2.1 试验方法
本次力学试验利用Inventor软件自带的仿真模块和有限元分析模块进行。首先进行采摘头力学仿真,得出与采摘头关键零件有关的铰链受力变化曲线图[22],如图3所示。
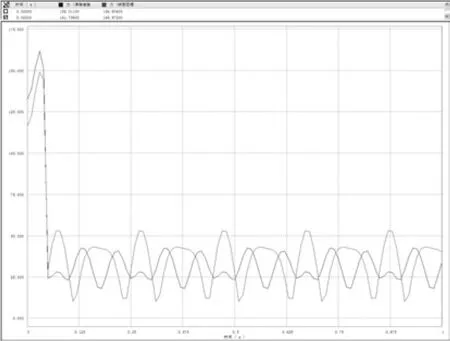
图3 第N次试验铰链受力变化曲线图Fig.3 The change curve of hinge stress in the Nth test
通过Inventor软件可搜索铰链受力最大的时间点,代入有限元分析模块,分析关键零件应力值[23],如图4所示为第N次试验短连杆应力分析图。
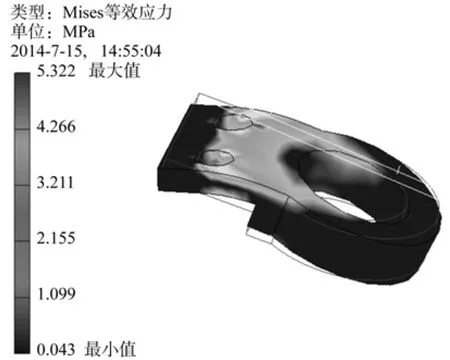
图4 第N次试验短连杆应力分析图Fig.4 The stress analysis diagram of short connecting rod in the Nth test
2.2 试验因素与指标
振动采摘作业时,振动频率与振幅都会对关键零件应力值产生影响。因此,本次试验试验因素取为振动频率和振幅。
通过初步验证,振幅小于18 mm,振动频率小于5 Hz时,落果率过小;振动频率大于20 Hz时,落花率和落叶率较大,影响第二年产量。故取曲柄长度9 mm~51 mm,振动频率5 Hz~20 Hz,因素水平如表2所示。
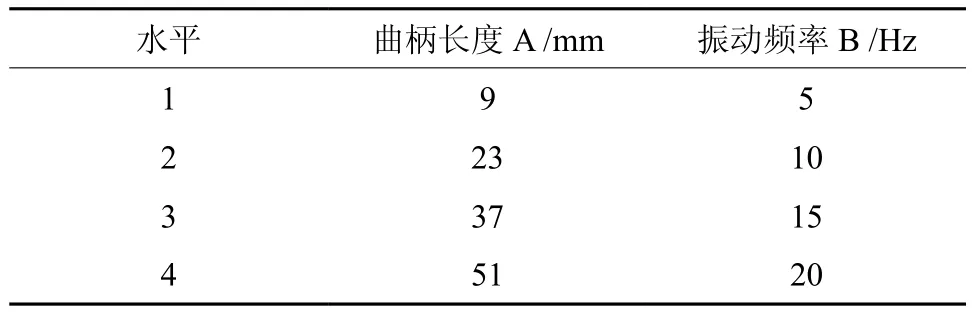
表2 因素水平Table 2 Factor levels
本次试验取长连杆、短连杆、振动曲柄和曲柄调节芯轴的最大应力值为试验指标进行正交试验,其表示符号分别为σ1,σ2,σ3,σ4。
2.3 试验方案与结果
确定试验因素与试验结果后设计正交试验方案并作出正交表[24]。试验方案与试验结果如表3所示。

表3 正交试验方案与结果Table 3 The orthogonal test plan and the results
3 试验结果分析
3.1 极差分析
对试验结果做极差分析,其结果如表4所示。为了便于直观地表示因素对指标变化的影响,做因素效应直观图如图5所示。
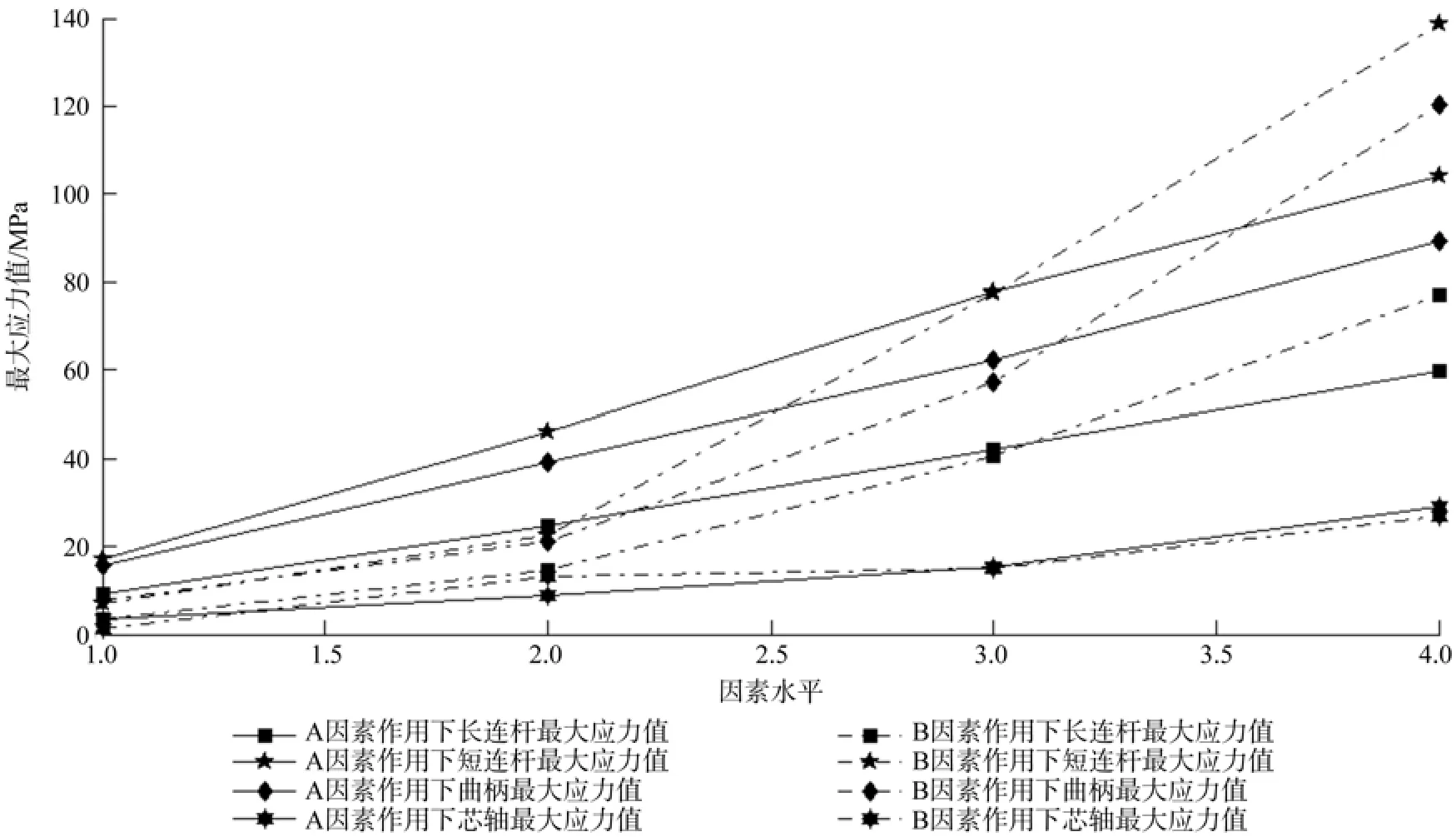
图5 因素效应直观图Fig.5 Pictorial diagram of factor effect
由表3、表4与图5可知,随着曲柄长度和振动频率的增加,各零件的最大应力值均呈增大趋势,并在最大振幅和最大频率处达到最大值;相对于振幅对最大应力值的影响,振动频率对最大应力值的影响较大;短连杆于各种工作状态下所受应力均为最大;关键零件材料选择为45钢调质处理,故各零件均安全。
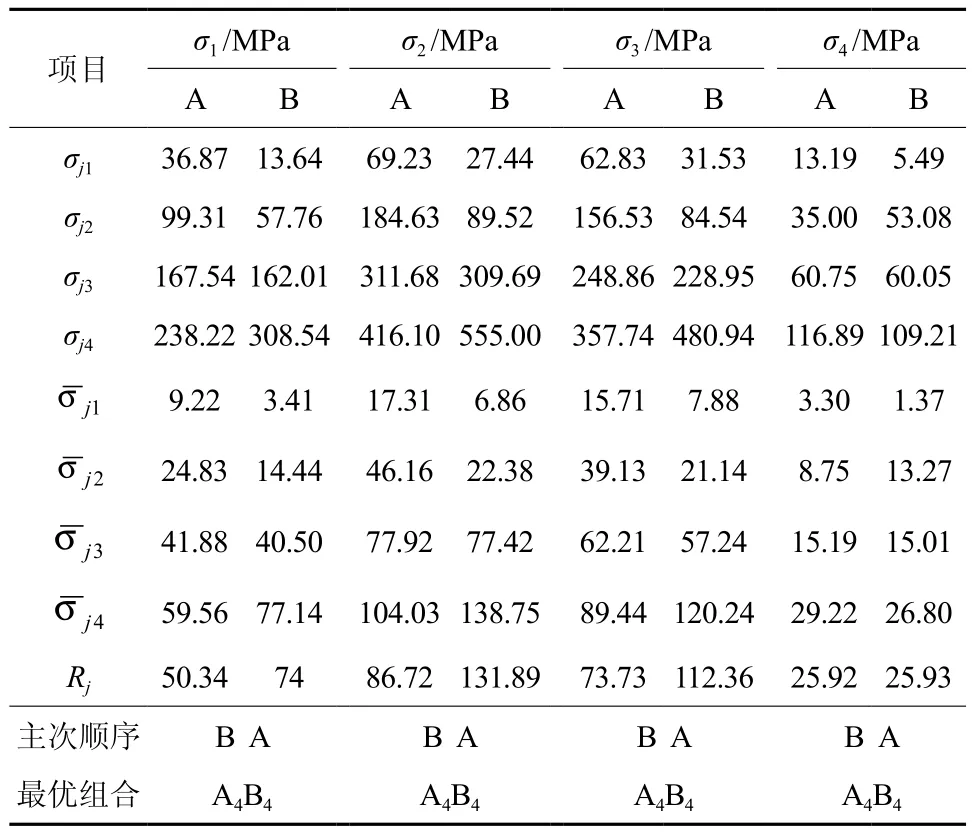
表4 试验结果极差分析表Table 4 The range analysis table of test results

表5 F检验结果Table 5 The results of F test
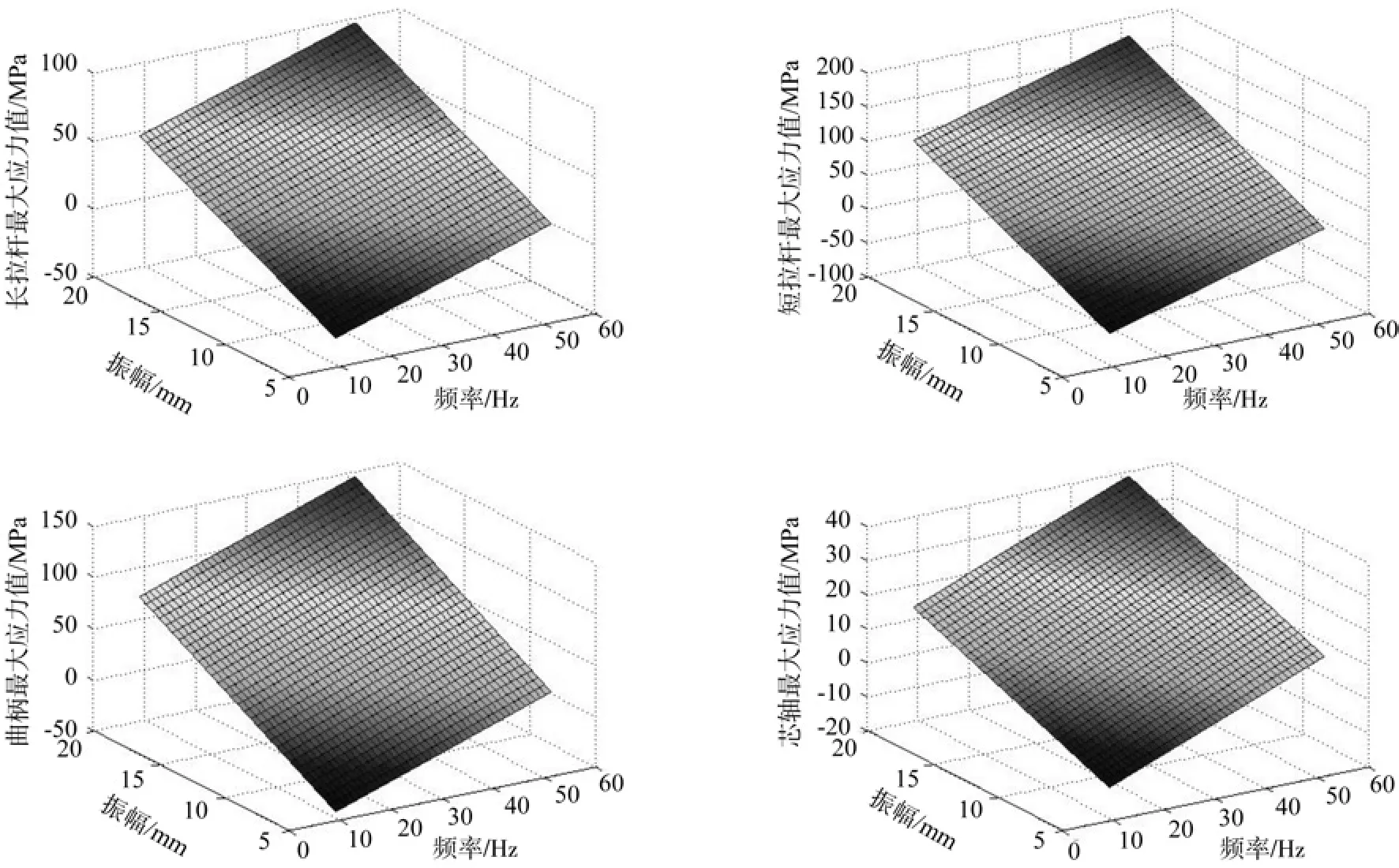
图6 试验因素对各零件最大应力值的影响Fig.6 The effect of tese factors on the maximum stress value of each parts
3.2 回归分析
利用Matlab软件regress函数对数据做多元线性回归分析[25],得出回归方程如下:
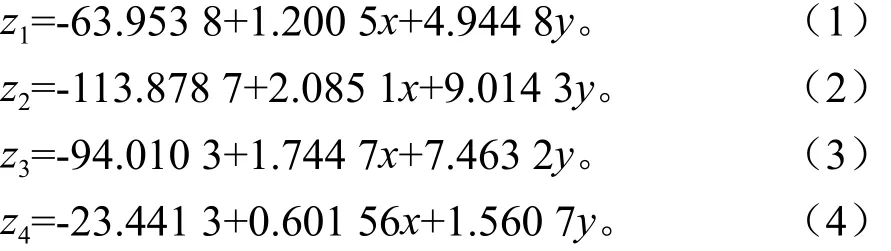
式中,x为曲柄长度,y为振动频率,z1~z4分别代表长连杆、短连杆、曲柄及曲柄调节芯轴最大应力值。
为验证回归方程及偏回归系数的显著性[26-28],以式(1)为例对其进行F检验,计算过程与结果列于表5中。
由表5可以看出,式(1)中x与y的系数和回归方程的F值均在显著性水平0.01之上,故回归方程及其系数均高度显著。
同理,可检验回归方程(2)~(4)及其系数均高度显著。
图6为试验因素对零件最大应力值的影响效果图。由回归方程(1)~(4)及图6可以看出,最大应力值z随振幅x和频率y的增大而增大,且于振幅x和频率y最大处达到最大值;频率y的系数均较大,即z在x=m(9≤m≤51)处投影所得直线的斜率k1均比z在y=n(5≤n≤20)处投影所得直线的斜率k2大,则频率y对最大应力值z的影响较大。
4 结 论
本文论述了油茶果采摘机器人采摘头的机构设计,利用Inventor软件对采摘头进行了力学仿真和关键零件的有限元分析试验,并对试验结果进行了极差分析和回归分析,分析结果一致。再结合油茶果采摘机器人实地采摘作业工作情况,得出以下结论:
(1)油茶果采摘机器人采摘头关键零件在不同工况下的最大应力值随振幅和频率的增大而增大;
(2)振动频率对最大应力值的影响效果较大,故在满足工作要求的条件下,应尽量减小振动频率;
(3)各关键零件的最大应力值远远低于45钢调质处理后的屈服极限,均能保证安全工作;
(4)短连杆的最大应力值较大,为保证工作过程的不产生较大变形,应适当加强;
(5)通过油茶果采摘机器人实地采摘试验,采摘头工作正常,采摘效果良好。
[1]马小焕. 油茶油的研究现状及其应用前景[J].绿色科技,2013, (12):116-117.
[2]王文杰, 陈长庚, 程 剑. 茶油在医药保健方面的积极作用[J].中国食物与营养, 2007, (9): 48-51.
[3]陈梅芳,顾景范,等.茶油延缓动脉粥样硬化形成及其机理的探讨[J].营养学报,1996,18(1):13-19.
[4]张规富,谢深喜,薛 华.油茶营养成分的分析测定[J].甘肃科学学报,2011,23(3):48-51.
[5]周 杨,徐 俐.油茶的营养价值及开发利用[J].贵州林业科技,2011,39(1):40-45.
[6]马 力.油茶籽的综合开发[J].粮食与食品工业, 2007, 14(3):10-12,16.
[7]周金沙,刘红梅.油茶籽的综合利用现状及前景分析[J].农产品加工.学刊,2006,(7):58-60,78.
[8]岳 臻.我国油茶市场需求研究[D].中南林业科技大学,2012.
[9]陈永忠,罗 健,王 瑞,等.中国油茶产业发展的现状与前景[J].粮食科技与经济,2013,138(1):10-12.
[10]柳维河,焦玉海.全国油茶产业发展现场会在湖北咸宁举行[J].中国林业产业,2013(3):10.
[11]高 伟,何小三,孙 颖,等.不同采收方式对油茶油脂含量的影响[J].经济林研究,2013,31(4):177-181.
[12]方建军.移动式采摘机器人研究现状与进展[J].农业工程学报,2004,20(2):273-278.
[13]姬 伟,罗大伟,李俊乐,等.果蔬采摘机器人末端执行器的柔顺抓取力控制[J].农业工程学报,2014,30(9):19-26.
[14]散鋆龙,牛长河,乔圆圆,等.林果机械化收获研究现状、进展与发展方向[J].新疆农业科学,2013,50(3):499-508
[15]Re fi k Polat, Ibrahim Gezer, Metin Guner,et al. Mechanical harvesting of pistachio nuts[J]. Journal of food engineering,2007, 79: 1131-1135.
[16]吕继东,赵德安,姬 伟,等.苹果采摘机器人对振荡果实的快速定位采摘方法[J].农业工程学报,2012,28(13):48-53.
[17]杨庆华,王 燕,高 峰,等. 基于摆线运动的黄瓜采摘机器人终端滑模轨迹跟踪控制[J]. 农业工程学报,2009,25(5):94-99.
[18]崔 鹏, 陈 志, 张小超. 苹果采摘机器人仿生机械手静力学分析与仿真[J]. 农业机械学报,2011, 42(2):149-153.
[19]刘继展, 李萍萍, 李智国. 番茄采摘机器人末端执行器的硬件设计[J]. 农业机械学报, 2008,39(3):109-112.
[20]苑庆泽,徐凤翔,王禹林,等.梯形丝杠副扭矩-轴向力测量方法及装置设计[J].机械工程师,2013(5):19-20.
[21]袁含晨,吴文逸,吴耀权.曲柄滑块机构运动学特性分析[J].电子制作,2013, (21):29.
[22]Monta M,Kondo N,Ting K C.End-effectors for tomato harvesting robot[J].Arti fi cial Intelligence Review,1998,12(1~3):11-25.
[23]李秦川,胡 挺,武传宇,等.果蔬采摘机器人末端执行器研究综述[J].农业机械学报, 2008,39(3):175-179.
[24]王 岩,隋思涟.试验设计与Matlab数据分析[M].北京:清华大学出版社, 2012.4.
[25]陈杰平,陈无畏,祝 辉,等.基于Matlab/Simulink的随机路面建模与不平度仿真[J].农业机械学报,2010,41(3):11-15.
[26]Geng Changxing, Zhang Kai, Zhang Erpeng,et al. Assessment on spraying effect of intelligent spraying robot by experiment[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2012,28(26): 114-117
[27]王新峰,钱东海.基于Open Inventor的机器人三维环境运动学仿真研究[J].机械工程师,2007(11):68-70.
[28]高自成,李立君,王勇桦,等. 基于Inventor的油茶果采摘机器人机械臂力学分析[J]. 中南林业科技大学学报, 2015,35(7): 121-124.
The design and analysis of Camellia fruit picking robots’ picking monomers
GAO Zi-cheng, LI Li-jun, WANG Peng-hui, ZHU Qiang, LUO Yu-kun
(Mechanical and Electrical Engineering Institute, Central South University of Forestry and Technology, Changsha 410004, Hunan, China)
Camellia is a kind of important oil tree species.Tea oil, which is of great value on nutritional and medicinal and has huge market demand, is extracted from the tea seed.With the increase of camellia’s cultivated area, the traditional manual harvesting have been unable to meet the demand of its scale and industrialization.Realizing the camellia fruit harvesting mechanized and roboticized has been the focus.Aimed at the status quo, camellia fruit picking robot is designed. Firstly, this paper discusses the working principle of camellia fruit picking robots’ picking monomers, and carries on the 3D structure design. Secondly, this paper proceeds mechanics simulation and fi nite element analysis text for the the picking monomers and its key parts of the robot used the software of Inventor.The test results show that the maximum stress value of key parts increase along with the increase of amplitude and frequency;vibration frequency of picking monomers has greater in fl uence on the maximum stress value of key parts;the maximum stress value of short connecting rod and crank is highest, but it is still less than the yield strength of material;veri fi ng the picking monomers of camellia fruit picking robot is feasible and security combined with fi eld work picking monomers test.
picking monomers,structural design,mechanical analysis, picking robots, camellia fruit
S776.22+2
A
1673-923X(2016)02-0114-05
10.14067/j.cnki.1673-923x.2016.02.022
http: //qks.csuft.edu.cn
2014-09-11
湖南省教育厅一般项目(12C0453)油茶果采摘机器人执行机构分析与优化设计 公益性行业科研专项(201104090)湖南省高校科技创新团队支持计划资助
高自成,博士研究生,副教授
李立君,教授,博导,博士后;E-mail:junlili1122@163.com
高自成,李立君,王朋辉,等. 油茶果采摘机器人采摘头设计与分析[J].中南林业科技大学学报,2016, 36(2): 114-118.
[本文编校:吴 彬]