一种适用于小型水轮机调速器的电液随动系统
2016-12-20王印松宋凯兵
王印松,宋凯兵
(华北电力大学河北省发电过程仿真与优化控制工程技术研究中心,河北保定071003)
一种适用于小型水轮机调速器的电液随动系统
王印松,宋凯兵
(华北电力大学河北省发电过程仿真与优化控制工程技术研究中心,河北保定071003)
针对水轮机调速器电液随动系统存在着结构复杂、体积大、标准化程度不高、可靠性较低和抗污染能力差等问题,提出了一种适用于小型水轮机调速器的电液随动系统。该系统主要由液压标准元件组成,具有结构简单、工作可靠、价格便宜、抗污染能力强等特点;采用Bang-Bang控制和脉宽调制(PWM)控制构成的双模控制算法,算法简单,易于在PLC上实现。实验证明了系统具有良好的动态、稳态性能。
水轮机调速器;电液随动系统;Bang-Bang控制;PWM控制;PLC
0 引 言
水轮机调速器是水轮发电机组重要的自动控制设备之一,其调节品质的优劣和运行的可靠性直接关系到水轮发电机组的安全、稳定运行和电能质量。因此,对品质优良、可靠性高的水轮机调速器的研究一直是一个非常重要课题。
电液随动系统作为水轮机调速器的执行机构,长期以来存在着系统结构复杂、体积大、标准化程度不高、可靠性低和抗污染能力差等现象[1]。其研究算法大多集中在包括模糊PID、自适应控制、人工神经网络和遗传算法等在内的复杂控制算法。因此造成了水轮机调速器电液随动系统“大脑发达,四肢不灵”的现状。近年来,随着液压标准元件在水轮机调速器领域中的使用,其标准化程度大大提高,结束了调速器长期游离于现代液压技术之外,制约液压新技术在水轮机调速器中应用的尴尬局面[2- 3]。针对于此,本文提出了一种适用于小型水轮机调速器的电液随动系统。该系统主要由液压标准元件组成,取消了主配压阀结构,具有结构简单、工作可靠、价格便宜、抗污染能力强等特点,而且控制算法简单,易于在PLC上编程实现。
本电液随动系统采用电磁换向阀控制替代传统的伺服阀或者比例阀控制。电磁换向阀功耗较小,价格便宜,控制简单,有效降低了系统的成本和简化系统的结构。电磁换向阀工作在全开或者全关的状态,与控制器之间连接为开关量连接,因此具有很强的抗污染能力和抗干扰能力,系统的环境适应性强。
可编程控制器(PLC)采用德国西门子公司的SIMATIC S7- 200,它具有功能强大,编程简单,可靠性高,通用性强,扩展灵活等特点。本电液随动系统的控制算法采用将Bang-Bang控制和脉宽调制(PWM)控制相结合的双模控制算法。该控制算法复合了Bang-Bang控制的快速性和脉宽调制(PWM)控制精度高的优点,而且控制算法简单,容易在PLC上编程实现。最后通过实验验证,证明了本电液随动系统具有良好的动、稳态性能,具有一定的工程应用推广价值。
1 电液随动系统的组成及工作原理
电液随动系统的主要功能是控制活塞的左右移动,达到位置控制的目的。本系统的结构组成如图1所示。当活塞左移时,压力油进入接力器油缸的右腔室,左腔室回油,当活塞右移时,压力油进入接力器油缸的左腔室,右腔室回油;当油液压力低于压力设定值下限时,电机启动,油泵开始加压,油液压力增大,当油液压力达到压力设定值上限时,电机停止工作,油泵加压结束,其能量储存在蓄能器中,用于驱动活塞左右移动。接力器油缸的活塞与水轮机的接力器相连,而接力器的转动就会改变水轮机导叶的开度。

图1 电液随动系统组成示意
该系统分自动控制和手动控制两种模式。自动控制时:3DT失电,1DT和2DT互锁,能且只能一个带电控制活塞左右移动,控制指令来自主控制器;手动控制时:3DT带电,1DT和2DT失电,通过手动控制杆控制活塞左右移动。
当系统处于自动控制模式下时,根据电磁铁通断电情况,分析活塞左移、右移和停止3种工作状态。
左移工作状态,电磁铁2DT通电,1DT和3DT断电,三位四通电磁换向阀12处于右位,压力油通过电磁换向阀10和12进入接力器油缸右腔室,活塞向左移动。
右移工作状态,电磁铁1DT通电,2DT和3DT断电,三位四通电磁换向阀12处于左位,压力油通过电磁换向阀10和12进入接力器油缸左腔室,活塞向右移动。
停止工作状态,电磁铁1DT、2DT和3DT断电,三位四通电磁换向阀12处于中位,压力油被截止,活塞保持于当前位置。
2 PLC控制系统的硬件构成
该电液随动系统采用SIMATIC S7- 200可编程控制器(PLC)作为主控制器,组成一个闭环控制系统,对被控参数进行实时测量,通过控制电磁换向阀的电磁铁通断电情况,来控制活塞左右移动,达到位置控制的目的。
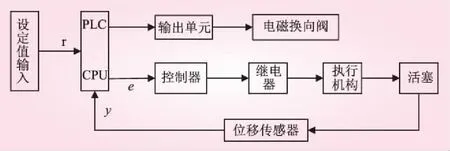
图2 PLC硬件组成示意
PLC控制系统的硬件组成如图2所示,其具体组成如下:CPU选用CPU 224XP CN,具有14个数字量输入点和10个数字量输出点;模拟量输入模块选用EM231,具有4个模拟量输入点,本系统输入为4~20 mA直流电流信号;电源选用西门子S7- 200专用电源PS 207,最大输出电流为2.5 A;位移传感器选用LEC150拉线位移传感器,输出为4~20 mA直流电流信号,继电器选用JZX- 22F/4Z,继电器底座选用CZY14A。
PLC控制系统通过CPU、继电器、执行机构及位移传感器组成一个带反馈的闭环控制系统。该闭环控制系统在人机界面输入活塞位置设定值后,经过PLC综合计算处理给出相应的控制指令,控制压力油进入接力器油缸的方向,进而控制活塞的左右移动,达到位置控制的目的。
3 控制算法的实现
本文提出的电液随动系统采用将Bang-Bang控制和PWM控制相结合的双模控制算法,该控制算法复合了Bang-Bang控制的快速性和PWM控制的精度高的优点,而且算法简单,容易在PLC上编程实现。该双模控制的主要思想是:系统设置位置误差阈值ξ,当位置误差e大于位置误差阈值ξ时,为保证尽快减小位置误差采用Bang-Bang控制算法;当位置误差e小于位置误差阈值ξ时,为保证控制精度采用PWM控制算法;其控制算法的流程如图3所示。

图3 Bang-Bang+PWM控制流程
3.1 Bang-Bang控制算法
在电液随动系统的位置控制中,为实现系统的时间最优控制,首先考虑Bang-Bang控制。Bang-Bang控制的思想是在控制域内,以最快的速度接近控制目标,实现时间最优或时间次优,具有控制结构简单,响应时间短以及可靠性高等优点。
Bang-Bang控制也称为开关控制或最小时间控制。设非线性时变系统的状态方程可由下列微分方程描述

(1)
初始条件为X(t0)=X0
(2)
目标集条件为S(t),X(t)∈S(t)
(3)
(4)
控制u(t)是受限的,即
(5)

(6)
对象的状态方程(1)满足一定条件时,受限控制uj(t)的最优解为
(7)
式中,Δ表示不确定;qj(t)为开关函数,若qj(t)只在独立的瞬间取零值,则称这种时间最优控制为平凡的,这就是Bang-Bang控制。
本电液随动系统中,采用的Bang-Bang控制策略为

(8)
式中,U为数字量输出,e为位置误差值,ξ为位置误差阈值。
但是单一的Bang-Bang控制虽然控制时间最优,但是系统往往会在期望值的附近产生极限振荡的现场,影响系统的稳定性,稳态误差也较大,因此Bang-Bang控制一般不单独使用,常和其他控制算法结合使用,以期望达到良好的控制效果和控制精度。本文将Bang-Bang控制算法和PWM控制算法综合使用,经过多次试验,系统的位置误差阈值设为ξ=1.7 mm。
3.2 PWM控制算法
当系统活塞的位置误差e小于位置误差阈值ξ时,为保证控制精度采用PWM控制算法,现分析双模控制中的PWM控制算法。
设脉宽信号的周期为T,T1为电磁换向阀的通电时间,T2为电磁换向阀的断电时间,则T1+T2=T,定义τ=T1/T定义为脉宽信号的占空比[10]。电磁换向阀在脉宽信号的控制下做开关动作,在一个脉宽信号周期内,PWM控制策略可表示为
(9)
式中,U表示数字量输出。
由式(9)可得,通过控制电磁换向阀通电时间T1的大小,即调节脉宽信号的占空比,可以实现活塞位置的微调,进而满足电液随动系统对控制精度要求,同时也在一定程度上减少了系统在期望值附近的剧烈的抖动,提高了系统的稳定性。
4 实验验证
本系统采用STEP7-Micro/WIN对PLC S7—200进行编程。本电液随动系统活塞的最大行程为170 mm,根据系统控制精度的要求,活塞位置的最大允许误差为δ=±0.2 mm。设系统活塞的位置设定值为r,位置测量值为y,则位置误差的计算公式为
e=y-r
(10)

采用上述参数,对PLC S7—200进行编程,下载并运行程序,实时监控PLC内重要参数和活塞位置变化过程。通过数据采集,得到电液随动系统活塞位置的实际响应曲线如图4所示。测得其中4个时间点对应的位置设定值、测量值和偏差值如表1所示。从图4和表1中可以看出,在自动运行模式下,输入活塞位置的设定值后,活塞能快速到达指定位置并保持位置不变,同时也满足电液随动系统控制精度的要求,控制误差在最大允许误差范围之内,系统具有良好的动态性能和稳态性能。该电液随动系统的位置误差最大值为±0.12%,再配上其他合理的装置,完全能够满足小型水轮机调速器的国家标准。

图4 位置响应曲线
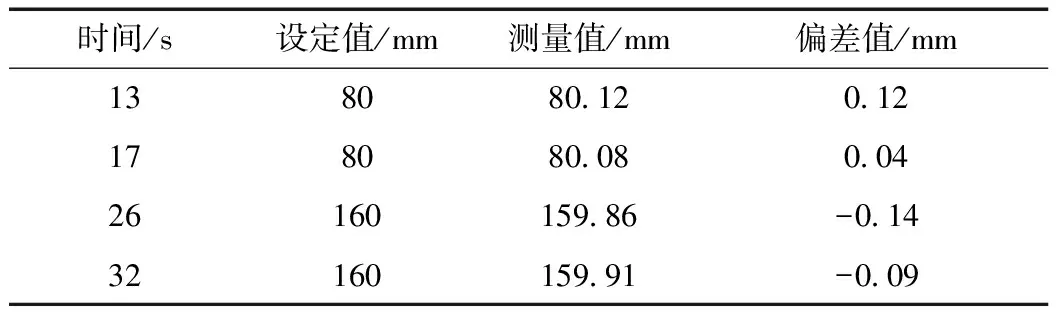
时间/s设定值/mm测量值/mm偏差值/mm13808012012178080080042616015986-0143216015991-009
5 结 语
本文对电液随动系统的结构组成及工作原理和PLC的硬件构成进行了介绍,系统具有结构简单、工作可靠、价格便宜、抗污染能力强等特点。分析了电液随动系统的Bang-Bang+PWM双模控制算法,给出了控制算法的流程图,算法简单,易于在PLC上编程实现,最后通过实验验证了控制算法的有效性和可行性。实验表明,该电液随动系统能够快速跟踪位置设定值,具有良好的动态性能和稳态性能,再配上其他合理的装置,完全能够满足小型水轮机调速器的国家标准,具有一定的工程应用推广价值。
[1]张晓英, 雷践仁, 杨新华, 等. 水轮机调速器新型电液随动系统的研究[J]. 水力发电, 2002(5): 36- 37, 76.
[2]潘熙和, 王丽娟. 我国水轮机调速技术创新回顾与学科前景展望[J]. 长江科学院院报, 2011(10): 221- 226.
[3]潘熙和, 王爱生, 黄业华. 中小型水电机组调速设备设计与选型探讨[J]. 水电自动化与大坝监测, 2011(4): 26- 30.
[4]程玉婷, 涂丽琴, 王爱生, 等. 高油压调速器机械液压系统的优化设计[J]. 长江科学院院报, 2013(12): 122- 125.
[5]刘惠娟, 邹木春, 余朝晖. 水轮机调速器电液随动系统H_∞鲁棒控制研究[J]. 液压与气动, 2006(8): 36- 39.
[6]张忠南, 林义忠, 吉慧丹, 等. PWM方式控制的水轮机电液调速器研究[J]. 机床与液压, 2010(5): 35- 37.
[7]徐凯. 一种时间最优参数自调整模糊矢量控制方法的研究[J]. 控制与决策, 2010(1): 153- 156, 160.
[8]禹见达, 陈政清, 王修勇, 等. 改进的Bang-Bang控制算法的理论与试验研究[J]. 振动与冲击, 2010(2): 60- 63, 88, 221.
[9]韩家威, 刘白雁, 莫文锋. 微型液压动力系统的PWM控制研究[J]. 中国机械工程, 2011(23): 2849- 2852.
[10]ANAVI-ISAKOW S, GOLANY B. Managing multi-project environments through constant work-in-process[J]. International Journal of Project Management, 2003, 21(1): 9- 18.
[11]王占林. 近代液压控制[M]. 北京: 机械工业出版社, 1997.
[12]高安邦, 石磊, 张晓辉. 西门子S7- 200/300/400系列PLC自学手册[M]. 北京: 中国电力出版社, 2013.
[13]廖常初. 西门子人机界面(触摸屏)组态与应用技术[M]. 北京: 机械工业出版社, 2008.
(责任编辑 高 瑜)
Study of Electro-hydraulic Servo System Suitable for Small Hydro Turbine Governor
WANG Yinsong, SONG Kaibing
(Hebei Engineering Research Center of Simulation & Optimized Control for Power Generation, North China Electric Power University, Baoding 071003, Hebei, China)
In view of the complicated structure, large size, low standardization, low reliability and poor anti-pollution of electro-hydraulic servo system of hydro turbine governor, a kind of electro-hydraulic servo system suitable for small turbine governor servo system is put forward. The system is mainly consisted by standardizated hydraulic components, and has the characteristics of simple structure, reliable operation, low price and strong anti-pollution ability. The system uses a dual mode control algorithm of Bang-Bang control and Pulse Width Modulation (PWM) control, which is simple and easy to be realized in PLC. The experiments demonstrate that the system has good dynamic and steady performance.
hydro turbine governor; electro-hydraulic servo system; Bang-Bang control; PWM control; PLC
2016- 04- 06
国家电网公司科技项目资助(DWJS500060)
王印松(1967—),男,河北河间人,教授,博士,主要从事清洁能源发电控制技术的研究.
TM312
A
0559- 9342(2016)09- 0079- 04