新型直线超声波电动机的研究进展
2016-12-20陈建毅林星陵
陈建毅,林星陵
(厦门城市职业学院,厦门 361008)
新型直线超声波电动机的研究进展
陈建毅,林星陵
(厦门城市职业学院,厦门 361008)
直线超声波电动机因其具有结构简单、可直接驱动、定位精度高等优点而受到广泛关注。综述了直线超声波电动机的研究概况和进展,分析不同类型直线超声波电动机的结构及驱动机理。
直线超声波电动机;V型定子;H型定子;U型定子;塔型定子;面内模态;纵弯模态
0 引 言
超声波电动机是一种全新驱动原理的微特电机,具有定位精度高、响应快、可直接驱动负载、结构简单且易于微小型化、无电磁干扰等一些独特优点。因此,在精密仪器、微机电系统以及航空航天等领域里有着良好的应用前景。三十多年来,国内外研究学者开展了大量的研究工作[1-30],成功研制了多种不同类型的超声波电动机。
直线超声波电动机是超声波电动机一种很重要的类型和分支,其工作原理是利用压电陶瓷的逆压电效应激发出定子的超声振动(微米级),并借助定子、动子之间的摩擦作用来直接驱动动子做直线运动以及直接驱动负载输出,从而实现将输入的电能转换为输出的机械能[1]。近年来,直线超声波电动机发展迅速,应用日益显著。例如,以色列Nanomotion公司已经成功将直线超声波电动机应用在精密驱动领域,并实现产品的产业化。德国、日本、美国等国家也已将这种新型驱动电机应用在一些高、精、尖的领域里[31]。
近年来,直线超声波电动机的研究工作取得了不小的进展,已研制出V型结构、H型结构、U型结构等多种不同类型。本文综述了近年来直线超声波电动机的研究成果,对不同类型直线超声波电动机的结构及运行机理进行归类和分析。
1 V型直线超声波电动机
1.1 电机定子的结构及运行机理[5-6]
V型直线超声波电动机利用其定子激发出的2个正交工作模态(对称振动模态和反对称振动模态)或者纵、弯复合振动模态,实现在驱动足处产生具有驱动作用的椭圆运动轨迹,从而推动动子(导轨)做直线运动。图1为V型定子结构的示意图[5],主要由两个兰杰文振子(夹心式换能器结构)组成,呈左右对称的V型结构。其中,兰杰文振子通过预应力螺栓将前端盖(含驱动足)、压电陶瓷片以及后端盖等部件紧固在一起,同时给压电陶瓷片施加一定的预紧力。
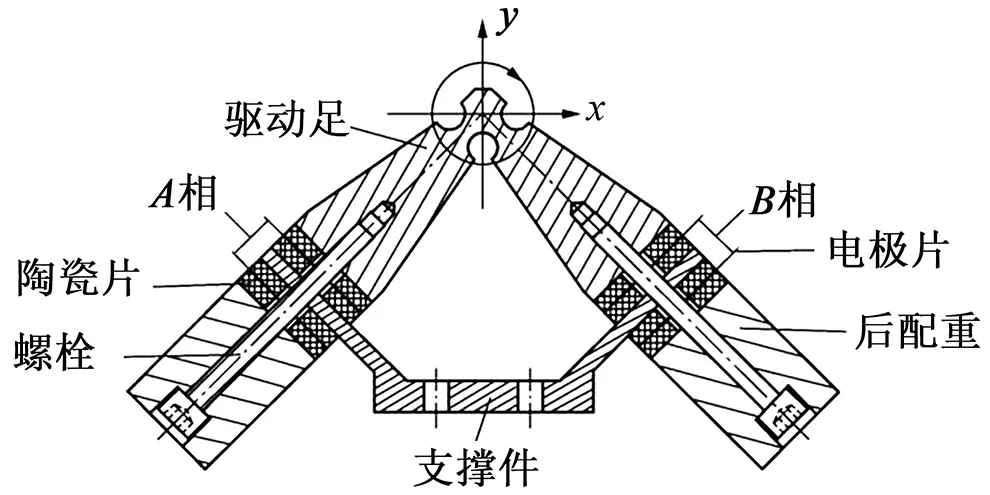
图1 V型定子的结构图
如图2所示[11],当V型定子的左右两个兰杰文振子的压电陶瓷片分别施加两路相同频率、相位差90°的激励信号(A相和B相)时,定子的2个正交工作模态同时被激发出,即对称振动模态和反对称振动模态。如图2(a)所示为对称模态,当输入的两路激励信号(A相和B相)同相时,定子工作在对称振动模态,左右两个振子做相同的伸缩运动,并在定子的顶点(驱动足处)合成为垂直方向的往复运动。如图2(b)所示为反对称模态,当输入的两路激励信号(A相和B相)反相时,定子工作在反对称振动模态,左右两个振子做相反的伸缩运动,并在定子的顶点(驱动足处)合成为水平方向的往复运动。在这2个正交工作模态的共同作用下,定子的顶点(驱动足处)合成了椭圆运动轨迹,并借助定子与动子之间摩擦力,实现推动动子(导轨)做直线运动。
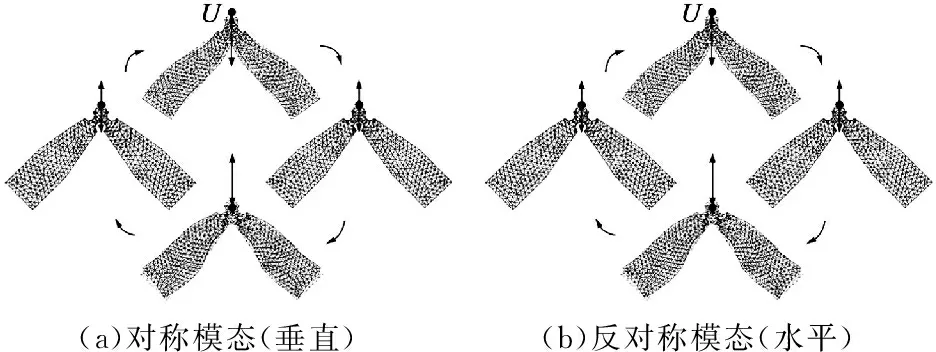
(a)对称模态(垂直)(b)反对称模态(水平)
图2 V型定子的2个工作模态
1.2 V型直线超声波电动机的研究情况
2009年,杨东、姚志远等人设计制作一种具有连续变截面超声变幅杆的V型直线超声波电动机[5-6]。该电机利用超声变幅杆原理来放大驱动足的振幅,从而获得更大的输出转速和输出推力。在50 N的预压力和300 V(峰峰值)的驱动电压的条件下,样机的最高空载速度为235 mm/s,最大输出推力达21.4 N。2012年,乔木等人设计制作一种双阶梯型超声变幅杆的V型直线超声波电动机[7]。该样机的最高空载速度为206 mm/s,最大输出推力为10.5 N。2012年,于会民等人提出了一种基于三滚子结构的夹持方案的V型直线超声波电动机[8]。实验表明,该夹持结构能够有效地提高电机运行的稳定性以及提高电机的输出机械性能。样机的输出推力最大值从原先的20 N提高到26.8 N,提高了34%。2012年,胡宁等人设计了一种柔性铰链夹持的V型直线超声波电动机[9]。如图3所示为所设计的圆弧柔性铰链夹持元件的结构(材料为65 Mn),主要包括了臂尾(厚度为2 mm)、支持臂(厚度为2 mm)以及3个柔性圆弧段(厚度为0.7 mm)等几个部分。其中,两边2个圆弧柔性铰链起弹簧作用,用于替代预压力弹簧给定子与动子之间施加预压力;中间1个圆弧柔性铰链可以起到消除装配应力的作用,同时减小对定子振动模态的影响。实验表明,该柔性铰链夹持元件可以直接作为线性弹簧,同时可以提高电机运行的稳定性以及改善电机的振动特性。2015年,简月等人在圆弧式柔性铰链夹持方式的基础上,提出了一种大切向刚度的梁式夹持方式[10],如图4所示。通过实验对比了梁式夹持方式的电机与圆弧式夹持方式的电机的输出特性。结果表明:梁式夹持方式的电机的输出速度最大值达1 400 mm/s,比圆弧式夹持方式的电机增大了4.6倍;梁式夹持方式的电机的输出推力最大值达37 N,比圆弧式夹持方式的电机增大了1.7倍。2015年,陈乾伟等人设计制作了一种单模态驱动双向运动(正反向)的新型V型直线超声波电动机[11],如图5所示。该样机主要由V型定子、动子(导轨)和预压力装置等组成。其中,动子相对于V型定子倾斜安装,倾斜角度为35°。在预压力为65 N和激励电压为600 V(峰峰值)的条件下,当工作在对称振动模态(激励频率为35.4 kHz)时,电机动子正向直线运动,最高空载速度和最大输出推力分别为180 mm/s和14 N;当工作在反对称振动模态(激励频率为38.4 kHz)时,电机动子反向直线运动,最大空载速度和最大输出推力分别为125 mm/s和24 N。2015年,汪红兵等人设计制作了一种压电叠堆非共振V型直线超声波电动机[12],该电机采用了尺寸为10 mm×5 mm×3 mm的压电叠堆作为定子。实验结果表明,该样机在93.5~96.7 kHz的频率范围内能够稳定运行;在激励频率96.7 kHz和驱动电压5 V的条件下,电机最大输出速度和最大输出力分别为25.78 mm/s和2.14 N。2016年,Zhang Yanhu等人对V型直线超声波电动机在Al2O3/Y-TZP、Al2O3/SiC、Al2O3/Si3N4和Al2O3/AlSiCp等四种不同摩擦副下的摩擦特性和输出性能进行研究[13]。2014年,Yang Lin等人对V型直线超声波电动机在不同温度下的输出特性进行研究[14],温度变化从-40°C到80°C。实验结果发现,电机的输出速度和输出推力随着温度的升高而增大。
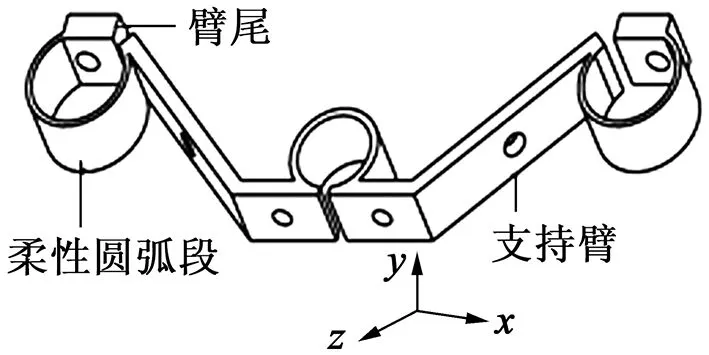
图3 圆弧式柔性夹持元件
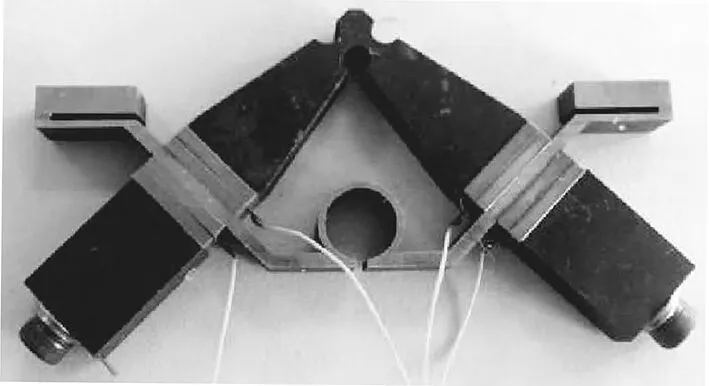
图4 梁式柔性夹持元件
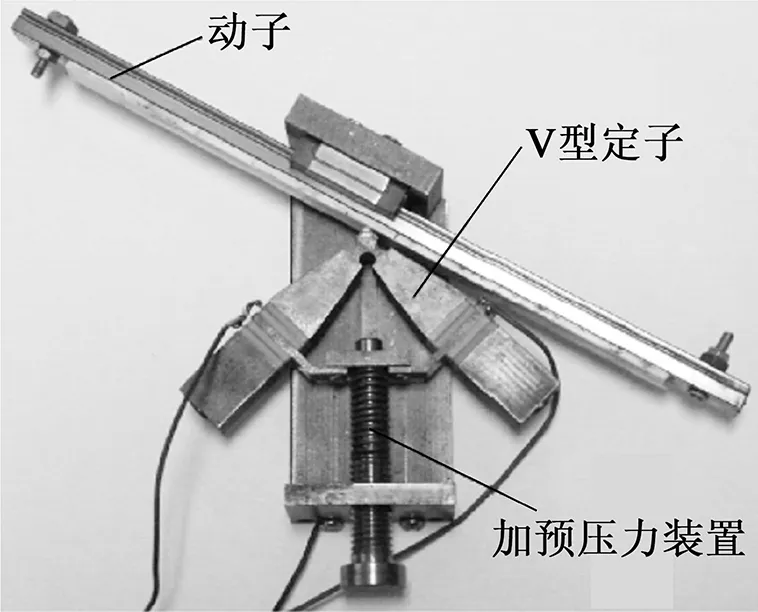
图5 斜动子V型直线超声波电动机的结构
2 H型直线超声波电动机
2.1 电机定子的结构及运行机理[16]
H型直线超声波电动机利用H型振子(夹心换能器结构形式[16]或者压电陶瓷片粘贴式[15])的纵弯复合振动模态在其两个驱动足形成椭圆运动轨迹,从而驱动动子做直线运动。图6为夹芯换能器结构形式H型定子的示意图[16],左、右两驱动杆(夹心换能器)分别通过预应力螺柱将定子的前盖板、两组压电陶瓷(纵振和弯振)以及后盖板等部件紧固为一体,并给压电陶瓷施加一定预紧力;两驱动杆前端部分通过横杆连接在一起,形成H型结构。
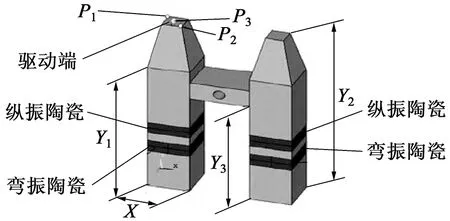
图6 H型定子的结构图
图7给出了电机定子对动子在一个振动周期内驱动的完整过程[16],当电机左、右两驱动杆的压电陶瓷片上施加两路相同频率、相位差90°的激励信号时,H型定子的一阶纵振L1和二阶弯曲振动B2同时被激发出,左、右两杆产生了交替的伸缩运动与弯曲运动,并在其驱动端质点合成椭圆轨迹运动,再借助定子与动子之间摩擦力,驱动动子(导轨)做直线运动。若要实现动子(导轨)做反向的直线运动,可通过改变输入的两路激励信号的相位关系,从而使驱动端质点做逆向的椭圆轨迹运动。
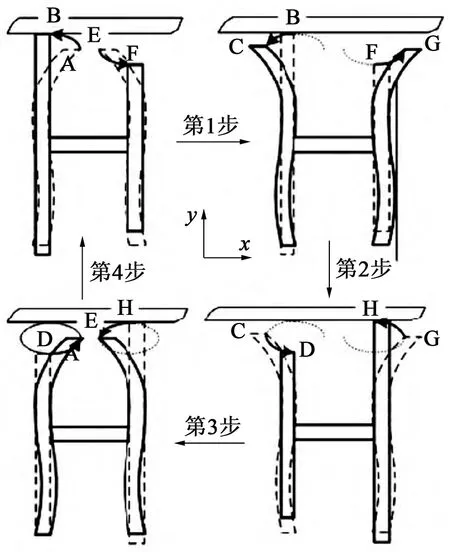
图7 H型定子的驱动过程
2.2 H型直线超声波电动机的研究情况
2013年,贺红林等人提出一种压电陶瓷片粘贴式H型振子的直线超声波电动机[15]。采用有限元对H型振子的振动模态和谐响应进行仿真和分析,获得H振子的工作模态和振幅大小。利用激光测振仪测得样机定子的纵振的振幅幅值为1.2 μm,以及弯振的振幅幅值为1.4 nμm。2015年,贺红林等人提出一种夹心换能器结构形式的H型振子的直线超声波电动机[16]。利用有限元法建立了定子机电耦合的有限元模型,在200 V电压激励下,其纵振的谐振频率为48.995 kHz,振幅幅值为8 μm;弯振的谐振频率为48.840 kHz,振幅幅值为6 μm。
3 U型直线超声波电动机
3.1 电机定子的结构及运行机理[17,32-33]
U型直线超声波电动机利用U型定子的纵弯复合振动模态或者2个正交工作模态(对称模态和反对称模态)进行驱动,并以U型定子的顶点作为驱动足推动动子做直线运动。图8为U型定子结构的示意图[17],该定子主要由U型结构的金属弹性体以及压电陶瓷片构成。其驱动原理如图9所示[17,32-33],当U型定子两个振动杆的压电陶瓷片上施加两路相同频率、相位差90°的激励信号时,定子同时被激发出对称振动模态和反对称振动模态,在这两个正交工作模态的共同作用下,U型定子的顶点(驱动足)形成椭圆轨迹运动,并借助定子与动子之间的摩擦力,推动动子做直线运动。
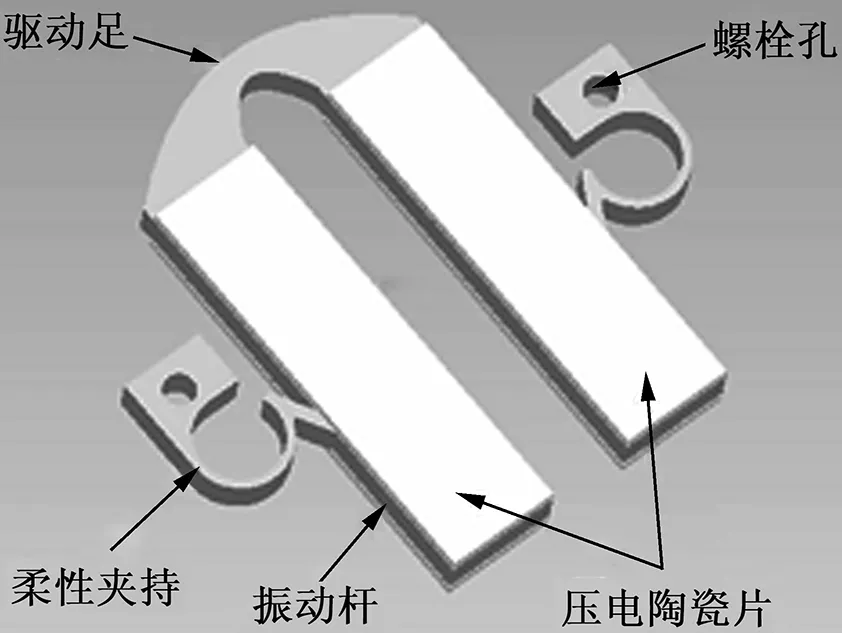
图8 U型定子的结构
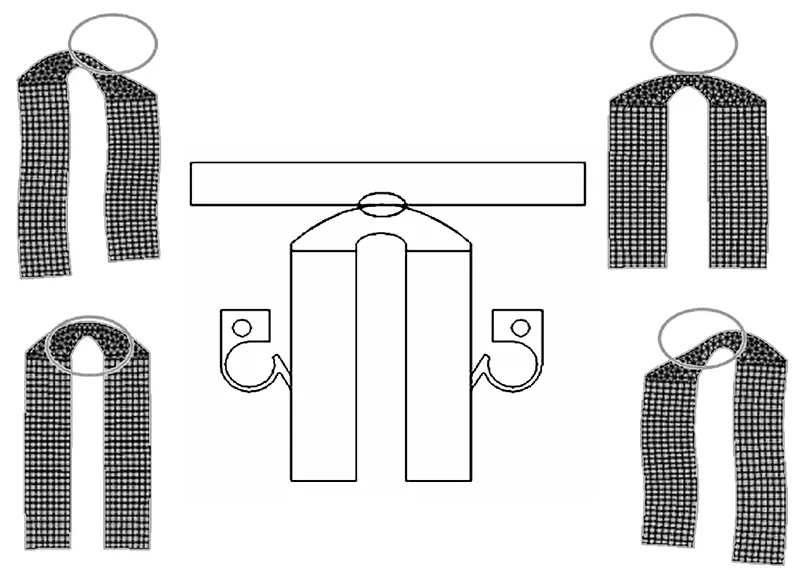
图9 U型电机的工作原理
3.2 U型直线超声波电动机的研究情况
2012年,苏松飞等人设计制作了一种基于柔性夹持的新型U型直线超声波电动机[17]。该电机样机的谐振频率为71.40 kHz,在预压力25 N和驱动电压400 V(峰峰值)的条件下,其最大输出速度和最大输出推力分别为470 mm/s和9 N。2014年,贺红林等人在H型直线超声波电动机的基础上,提出一种U型变截面的直线超声波电动机[18]。该电机样机的谐振频率为78.11 kHz,在驱动电压240 V(峰峰值)的条件下,输出速度最大值为125.6 mm/s。
4 塔形直线超声波电动机
为了解决当前直线超声波电动机没办法实现相互独立控制法向振动以及切向振动的问题,陈乾伟等人设计制作了一种能够实现工作模态独立控制的塔形直线超声波电动机[19]。图10为塔形定子结构的示意图[19],主要由塔形的金属弹性体(包含两个正方形截面的柱状振动杆)以及6片压电陶瓷片构成。该电机定子设计有2个非共面的正交工作模态,即x-z面内的对称振动模态(由A相信号单独激励)以及y-z面内的弯振模态(由B相信号单独激励)。通过控制A相信号和B相信号就可以实现独立控制2个非共面的正交工作模态,从而实现独立控制法向振动以及切向振动。通过实验测试,电机在解耦控制的条件下,当固定A相信号的驱动电压值时,样机的输出速度与B相信号的电压成正比关系;当固定B相信号的驱动电压值时,样机的输出速度与A相信号的电压成非线性关系。当A相信号和B相信号的驱动电压都为400 V(峰峰值)时,样机的输出速度最大值为420 mm/s。
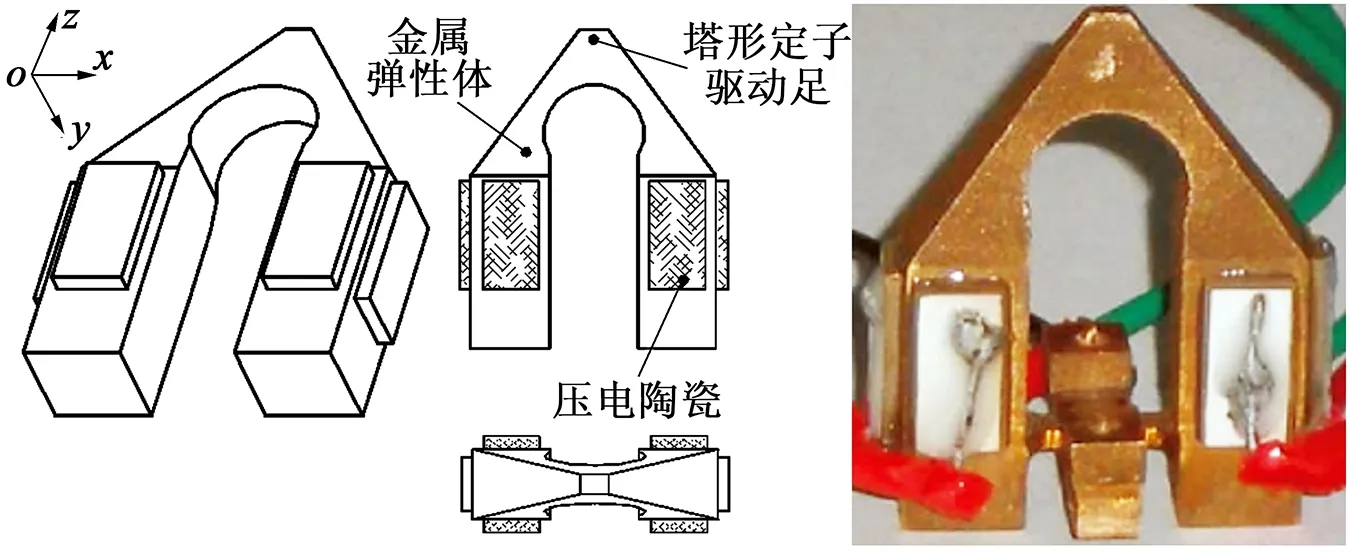
图10 塔形定子的结构
5 面内纵弯型直线超声波电动机
5.1 电机的结构及运行机理[20]
面内纵弯型直线超声波电动机利用矩形板定子激发出的纵振、弯振振动模态实现驱动动子的直线运动。如图11为单驱动足的面内纵弯型直线超声波电动机工作原理示意图[20],该电机定子是由一块含有单驱动足的矩形金属板(如磷青铜材料)以及8片压电陶瓷片构成。矩形金属弹性体的上面和下面均粘贴有4片PZT压电陶瓷片,并且上面4片压电陶瓷片的极化方向和下面4片压电陶瓷片的极化方向是成对称的。当矩形振子的压电陶瓷片施加两路相同频率、相位差90°的激励信号时,定子的一阶纵振L1和二阶弯曲振动B2同时被激发,在定子的单驱动足处合成了椭圆运动轨迹,借助定子与动子之间摩擦力,驱动动子(导轨)向右或者向左做直线运动。

图11 面内纵弯模态直线超声波电动机的工作原理
5.2 面内纵弯型直线超声波电动机的研究情况
2010年,胡丹等人设计制作了一台单驱动足的面内纵弯模式的直线超声波电动机[21]。该电机样机的谐振频率为43.68 kHz,在预压力8.5 N的条件下,样机的输出速度最大值为28.6 mm/s,输出推力最大值为2 N。2012年,万志坚设计一种开有4个双圆头长孔的双驱动足矩形压电振子的直线超声波电动机[22]。通过有限元仿真和分析,该开孔的矩形压电振子的振幅明显比没有开孔的振幅增大。2014年,万志坚等人设计制作了一台开有4个双圆头长孔的单驱动足矩形压电振子的直线超声波电动机[23]。通过实验对比了有开孔与没有开孔电机样机的输出特性。结果表明:有开孔的电机样机的输出推力和输出速度明显变大。2011年,时运来等人设计了一种具有振幅放大结构的基于面内纵弯型直线超声波电动机[24]。该电机在矩形压电振子设计了一个三角形结构,该三角形结构可以将振子的振幅放大。通过对比不同夹角的三角形结构电机样机的输出性能,得到夹角为20°的电机样机的最大输出速度以及最大输出推力分别能达到98 mm/s和3.2 N。2015年,孙士平等人在时运来设计的电机的基础上,设计了一种双足反向型的面内纵弯模式的直线超声波电动机[25]。该电机在矩形板振子设计了两个三角形结构,用于放大振幅以及驱动两导轨实现反向直线输出。通过建立的有限元模型仿真电机的输出性能,仿真得到电机的最大空载速度能够达到120 mm/s,最大输出推力达到30 N。
6 夹心式纵弯型直线超声波电动机
2010年,石胜君等人研制了一种单驱动足的大功率纵弯复合型直线超声波电动机[26]。图12为定子结构的示意图,主要由2个夹心式换能器和2个指数型变幅杆组成,中间部分设计有一个驱动足。该电机通过定子激发出的纵振和弯振在其驱动足形成一个具有驱动功能的椭圆轨迹,从而实现驱动动子作直线运动。通过实验测试,该样机的输出速度最大值达1 280 mm/s,输出推力的最大值达45 N。2010年,刘英想等人研制了一种T型单驱动足的大功率直线超声波电动机[27]。如图13所示,该电机定子主要由3个夹心式换能器和3个指数型变幅杆组成,并布置成T型,单驱动足设在3个变幅杆结合处。通过实验测试,电机样机的输出速度最大值为1 160 mm/s,输出推力最大值为20 N。2012年,刘英想等人研制了一种双驱动足的纵振复合直线超声波电动机[28]。如图14所示,该电机定子由2个竖直放置的夹心式换能器以及1个水平放置的夹心式换能器组成。其中,水平放置的换能器两端的指数型变幅杆小端与2个竖直换能器的变幅杆大端侧面连接,两个驱动足设在2个竖直换能器的指数型变幅杆小端面处。通过实验测试,样机的最大输出速度和最大输出推力分别为602 mm/s和32 N。同年,对该双驱动足的纵振复合直线超声波电动机的定子进一步改进,水平换能器的两端指数型变幅杆的小端与两个竖直换能器变幅杆的结合处设计在指数型变幅杆的小端面位置[29]。实验测试,改进样机的输出速度最大值提高到854 mm/s,输出推力最大值增大到40 N,分别增加了42%和25%。2013年,Yang Xiaohui等人[30]设计制作了一种双足的纵弯复合型直线超声波电动机。该电机定子采用夹心式换能器结构,采用2组弯振的压电陶瓷。该电机样机的最高输出速度为560 mm/s,最大输出推力达55 N。

图12 夹心式纵弯复合直线超声波电动机定子的结构图
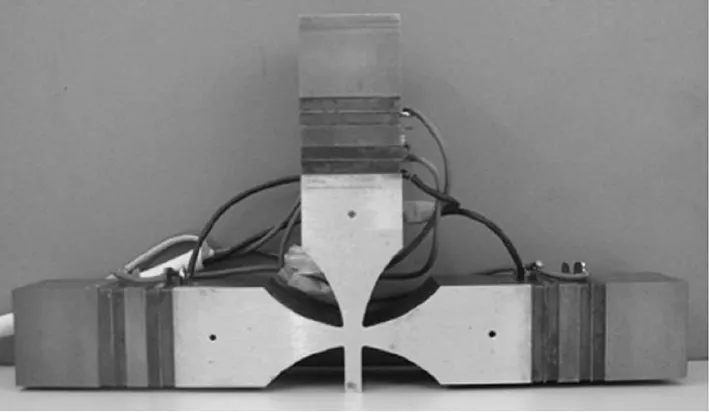
图13 T型单足直线超声波电动机定子的结构图
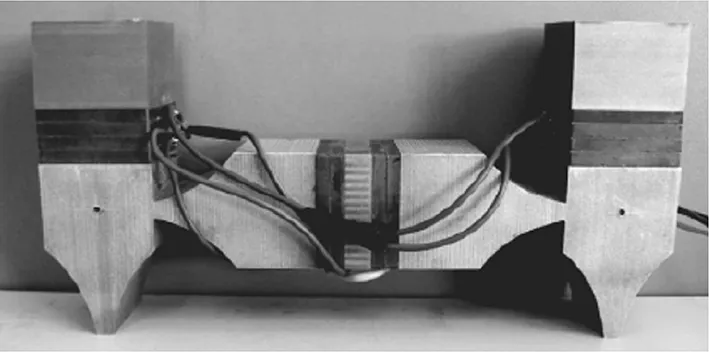
图14 纵振复合双足直线超声波电动机定子的结构图
7 结 语
直线超声波电动机是利用压电陶瓷的逆效应实现从电能到机械能转换,直接驱动动子做直线运动和直接输出动力,具有定位精度高、易于实现微小型化和轻量化等优点,在小型精密驱动的应用领域里具有明显的优势,成为近年来的一个研究热点。本文重点综述了近年来多种新型直线超声波电动机的研究进展和取得的成果。相信随着这些新型直线超声波电动机的性能以及稳定性的深入研究、开发和产业化,将使得直线超声波电动机在小型精密驱动以及更多的工程应用领域中发挥作用。
[1] 赵淳生.超声波电机技术与应用[M].北京:科学出版社,2007.
[2] 陈建毅,郑祝堂,陈方辉.模态转换型超声波电机的驱动机理与研究进展[J].微电机,2013, 46(6):76-82.
[3] TOMOAKI M.Micro ultrasonic motor using a one cubic millimeter stator[J].Sensors and Actuators A,2014,213:102-107.
[4] QU Wenchu,YANG Ming,MENG Fan,et al.Continuous high-performance drive of rotary traveling-wave ultrasonic motor with water cooling[J].Sensors and Actuators A,2015,222:220-227.
[5] 杨东,姚志远.双变幅杆V形直线超声波电动机研究[J].压电与声光,2009,31(5):685-687.
[6] 姚志远,杨东,赵淳生.杆结构直线超声波电动机的结构设计和功率流分析[J].中国电机工程学报,2009,29(24):56-60.
[7] 乔木,洪尚任.双兰杰文振子V型直线超声波电动机的设计与实验[J].微特电机,2012,40(5):40-42.
[8] 于会民,王寅,陈乾伟,等.三滚子结构夹持的直线型超声波电动机[J].机械科学与技术,2012,31(1):250-254.
[9] 胡宁,姚志远,赵文涛.直线超声波电动机柔性夹持元件的设计[J].中国机械工程,2012,23(9):1089-1091.
[10] 简月,姚志远,杨模尖,等.V型直线超声波电动机梁式夹持的结构设计[J].光学精密工程,2015,23(5):1358-1364.
[11] 陈乾伟,时运来,黄卫清.单模态驱动双向运动的斜动子V形直线超声电机[J].南京航空航天大学学报,2015,47(1):139-144.
[12] 汪红兵,李志荣,孙春华.一种压电叠堆非共振V形直线超声波电动机研究[J].微特电机,2015,43(10):12-14.
[13] ZHANG Yanhu,QU Jianjun,LI Jinbang.Friction and wear behavior of linear standing-wave ultrasonic motors with V-shape transducers[J].Tribology International,2016,95:95-108.
[14] YANG Lin,JIANG Chao,YAO Zhiyuan.The research on the performance of linear ultrasonic motor under different temperature[J].Journal of Vibroengineering,2014,16(2):792-799.
[15] 贺红林,武冬梅,何文丛,等.H-结构薄板纵弯复合模态驱动的压电直线电机[J].振动与冲击,2013,32(5):1-5.
[16] 贺红林,肖煜涵.准H超声换能结构驱动的直线电机动力学特性分析[J].南昌航空大学学报(自然科学版),2015,29(1):20-26.
[17] 苏松飞,姚志远,耿冉冉,等.U形直线超声波电动机结构设计[J].哈尔滨工程大学学报,2012,33(6):759-763.
[18] 贺红林,何文丛,刘文光.U型变截面薄板面内复合模态驱动的直线超声波电动机[J].振动与冲击,2014,33(18):65-71.
[19] 陈乾伟,鞠全勇,黄卫清,等.工作模态控制解耦的塔形直线超声波电动机[J].振动、测试与诊断,2015,35(1):107-111.
[20] 万志坚,胡泓.面内弯纵型直线超声波电动机的驱动与摩擦分析[J].振动、测试与诊断,2014,34(2):20-22.
[21] 胡丹,洪尚任,林华,等.基于面内振动的纵弯模式超声波直线电机的设计与实验[J].微电机,2010,43(9):20-22.
[22] 万志坚.基于面内模态的直线超声微电机研究[J].微电机,2012,45(2):30-33.
[23] WAN Zhijian,HU Hong.Modeling and experimental analysis of the linear ultrasonic motor with in-plane bending and longitudinal mode[J].Ultrasonics,2014,54:921-928.
[24]SHIYunlai,ZHAOChunsheng.Anewstanding-wave-typelinearultrasonicmotorbasedonin-planemodes[J].Ultrasonics,2011,51(4):397-404.
[25] 孙士平,胡政.双足反向型直线超声波电动机的优化设计及性能仿真[J].中国机械工程,2015,26(13):1783-1788.
[26] 石胜君,陈维山,刘军考,等.大推力推挽纵振弯纵复合直线超声波电动机[J].中国电机工程学报,2010,30(9):55-22.
[27]LIUYingxiang,CHENWeishan,LIUJunkao,etal.Ahigh-powerlinearultrasonicmotorusinglongitudinalvibrationtransducerswithsinglefoot[J].IEEETransactionsonUltrasonics,FerroelectricsandFrequencyControl,2010,57(8):1860-1867.
[28] 刘英想,姚郁,陈维山,等.纵振复合双足直线超声波电动机[J].西安交通大学学报,2012,46(8):111-115.
[29]LIUYingxiang,LIUJunkao,CHENWeishan,etal.AU-shapedlinearultrasonicmotorusinglongitudinalvibrationtransducerswithdoublefeet[J].IEEETransactionsonUltrasonics,FerroelectricsandFrequencyControl,2012,59(5):981-989.
[30]YANGXiaohui,LiIUYingxiang,CHENWeishan,etal.LongitudinalandbendinghybridlinearultrasonicmotorusingbendingPZTelements[J].CeramicsInternational,2013,39:S691-S694.
[31] 时运来.新型直线超声波电动机的研究及其在运动平台中的应用[D].南京:南京航空航天大学,2011.
[32] 苏松飞.U形直线超声波电动机设计和实验及其并联性能研究[D].南京:南京航空航天大学,2012.
[33] 赵雷.基于柔性铰链设计的直线超声波电动机运动平台动力学研究[D].南京:南京航空航天大学,2012.
Recent Development on the Linear Ultrasonic Motor
CHENJian-yi,LINXing-ling
(Xiamen City University,Xiamen 361008,China)
The linear ultrasonic motor is widely attractive for its characteristics, such as a simple structure, a direct and straight drive, a high precision, etc.In this paper, the recent developments of the linear ultrasonic motor were summarized.The structure and driving mechanism of different linear ultrasonic motors were analyzed.
linear ultrasonic motor; V-shaped stator; H-shaped stator; U-shaped stator; a tower-type stator; mode in-plane; longitudinal and bending modes
2016-02-05
2014年福建省高校杰出青年科研人才培育计划(JA-14424)
TM359.9
A
1004-7018(2016)09-0097-05
陈建毅(1979-),男,博士,副教授,主要从事超声波电动机开发研究。
