新型超环面电机爪式转子磁场的解析计算
2016-12-20刘欣,黄凯
刘 欣,黄 凯
(天津工业大学,天津 300387)
新型超环面电机爪式转子磁场的解析计算
刘 欣,黄 凯
(天津工业大学,天津 300387)
爪式转子是新型超环面电机的中间传动机构,也是该电机的动力输出机构。针对该转子的特殊结构特点,利用等效电流法对其行星轮磁齿进行了等效建模,通过有限元磁场仿真验证了该模型的正确性;由齐次坐标变换原理推导了行星轮坐标系和该电机系统坐标系下磁场强度的计算公式,对爪式转子与内外定子气隙圆周磁场分布进行了解析计算,得到了其分布规律,验证了该解析方法的可行性。该研究为进一步对内外定子与转子间电磁力的计算提供了理论依据。
爪式转子;超环面电机;等效电流法;齐次坐标
0 引 言
随着科学技术的发展,由各种学科与技术相互渗透与交叉发展起来的多种驱动介质构成的系统,具有十分重要的现实意义[1-2],各种驱动形式的复合推动着当前电力拖动技术的发展。同时,工业控制领域对电力需求越来越大,这对电机提出了性能优良、运行可靠、重量轻和体积小等方面的要求,这就需要在电机的新原理、新结构和新的运行方式方面不断进行探索和研究。
超环面电机是将行星蜗杆传动和电磁驱动有机结合而形成的一种新型空间电机,它集控制、驱动和传动为一体,实现了微型化的机电、控制和驱动的结构集成,它还简化了中间传动机构,使其驱动系统更加紧凑,无需减速机构可以直接驱动负载,提高其驱动系统的响应速度及效率。除了在航空航天、军事和车辆等要求结构紧凑的领域外,尚可用于机器人控制和飞行器制导等控制精度要求较高的技术领域,具有更为广阔的应用前景[3-5]。
1 超环面电机结构原理
新型超环面电机主要有蜗杆内定子、环面外定子以及爪式转子组成,其结构原理图如图1所示。蜗杆内定子铁心由硅钢片叠压而成,表面切有螺旋电枢槽,槽内绕有电枢线圈;环面外定子由若干永磁体制成的螺旋梁组成,其中螺旋梁均匀地嵌在固定的支架上;爪式转子固联一定个数的行星轮,行星轮圆周上嵌有N极和S极相间的永磁齿,爪式转子作为输出轴,是由行星轮磁齿与内外定子磁场间的电磁啮合作用来驱动的。

图1 超环面电机结构原理图
蜗杆内定子电枢绕组通入交流电后,在其外环面产生螺旋的旋转磁场,该磁场与外定子永磁梁的固定磁场共同作用,驱动以永磁体为轮齿的多个行星轮在自转的同时绕蜗杆内定子公转,行星轮的公转带动固联的爪式转子旋转,转子的输出转速符合行星传动减速关系,从而使得超环面电机实现了内部减速功能[6]。由于行星轮节距和内外定子螺旋角之间满足充分啮合关系,在转子的运转过程中行星轮磁齿与内外定子间始终保持N极、S极相互吸引产生电磁力,从而实现力矩的输出。
新型超环面电机各个部件间的电磁力是通过与爪式转子上行星轮磁齿的电磁啮合来实现的,爪式转子磁场的分布情况直接影响着该种电机的运行性能。为此,本文基于等效电流法,对行星轮磁齿在超环面电机系统中产生磁场进行解析计算,得到其产生磁场在空间的分布规律。
2 磁齿等效电流模型
2.1 电流模型
行星轮永磁齿是由钕铁硼材料制成,根据等效电流法[7],可以把永磁齿等效为如图2所示的电流模型,其线圈内通有电流I,螺旋线圈的半径为a,长为2L。
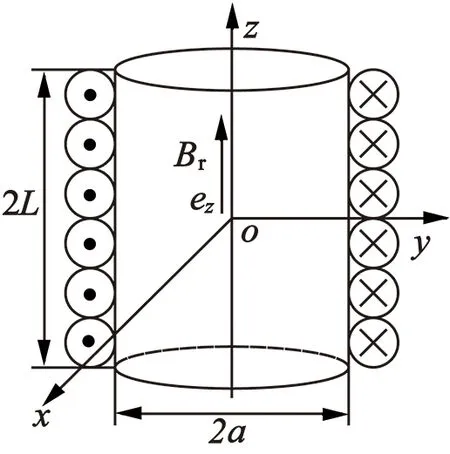
图2 等效电流模型
单匝线圈在中心轴线上产生的磁感应强度Bz0=μIez/2a,可得等效螺线圈中心轴线上的磁场强度:
式中:d为通螺线圈导线的直径,N为螺线圈匝数,N=2L/d。由于螺旋圈内电流是有螺旋升角的,d越大,升角就越大,产生磁场方向与z轴方向的夹角就越大,与磁齿的等效精度就越低,合理选择导线直径才能使它在外部产生磁场与行星轮磁齿等效。
2.2 磁齿产生磁场
在图2所示行星轮永磁齿坐标系o-xyz内,计算磁齿等效螺旋线圈在空间一点产生的磁场。螺旋导线l的方程:
式中:θ为导线上一点绕z轴旋转过的角度,-φ≤θ≤φ,φ=2Lπ/d。由毕奥-沙伐尔定律可得,导线上的任意一微元段在空间任一点(x,y,z)处产生的磁场的磁感应强度:
式中:r为微元到空间点的矢量。将式(3)改写为矩阵形式:
式中:rx=x-xl,ry=y-yl,rz=z-zl,由式(1)得:
将式(2)和式(5)代入式(4)并积分得:
由各轴方向上的磁感应强度分量可得与行星轮磁齿等效的螺旋线圈在行星轮磁齿坐标系下任意空间点处产生的磁场强度:
2.3 磁齿等效模型验证
为了验证行星轮磁齿等效模型对其磁场数值解析的正确性,由Ansoft有限元仿真软件,建立高10 mm×Φ10 mm圆柱形磁齿的三维有限元模型,对该模型进行网格剖分并计算,后处理得到距离该磁齿上端面0.3 mm平面处的磁场强度分布如图3所示。
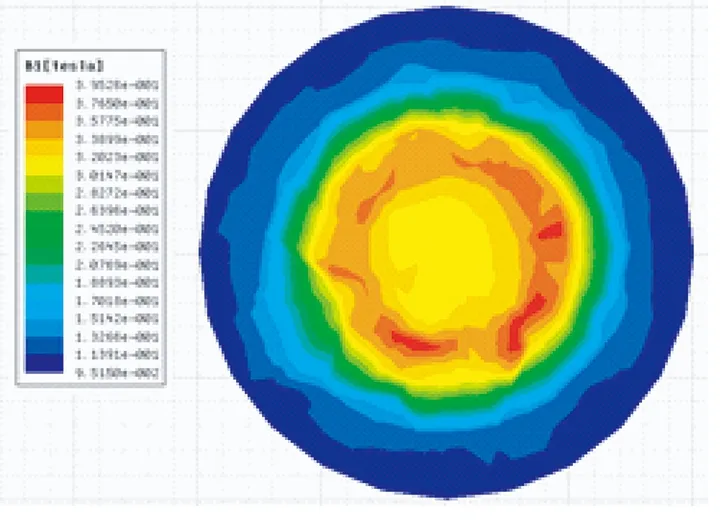
图3 有限元仿真结果
为了便于与仿真结果进行对比,由静态磁场计算器求得指定该平面直径路径上的磁密,与式(7)计算得到的磁场强度解析解进行对比如图4所示。由图4可以看出,由磁齿等效电流模型解析计算得到的结果与三维磁场仿真结果规律性一致,在磁齿直径区域内磁密较大;但解析计算结果较精确的仿真结果有一定的差别,这是由于解析计算方法没有考虑漏磁引起的。通过对比表明建立的等效电流模型是合理的,而且由它求得任意空间点的磁场强度时解析关系明确。

图4 磁齿模型解析与仿真结果对比
3 行星轮磁场计算
行星轮磁场分布是其上各磁齿产生磁场的叠加。以行星轮的中心为坐标原点,其轴线方向为X1轴,建立行星轮坐标系O1-X1Y1Z1,以及行星轮上各磁齿的坐标系oi-xiyizi,i=1,2,…,n,如图5所示,其中n为行星轮磁齿数。

图5 行星轮坐标系与磁齿坐标系间关系
空间任意一点在某一小磁齿坐标系中的坐标为(xi,yi,zi)和其在行星轮坐标系下的坐标(X1,Y1,Z1)间的关系可以通过变换得到,即:
式中:H1i为各个小磁齿坐标系与行星轮坐标系的变换矩阵。由图5坐标系间关系可得:
其中:θi为各小磁齿坐标系相对于行星轮坐标系转过的角度,θi=2π(i-1)/n,r为小磁齿坐标系原点到行星轮坐标系原点的距离。
由于空间任意一点处磁场强度不会随着坐标系的设定不同而随之改变。根据坐标系的变换关系得出行星轮坐标下磁场的对应变换关系。

4 系统坐标系下磁场强度计算
超环面电机系统是以蜗杆内定子为中心的,为了便于研究内外定子产生磁场与行星轮磁齿间的相互作用,还需要将各磁齿在行星轮系下产生磁场变换到该电机系统坐标系下。以内定子中心为系统坐标原点,蜗杆轴线方向为Z轴,建立系统坐标系O-XYZ,如图6所示,其中爪式转子轴线与Z轴重合,其上各行星轮的坐标系为Oj-XjYjZj,j=1,2,…,m,m为转子上的行星轮个数。
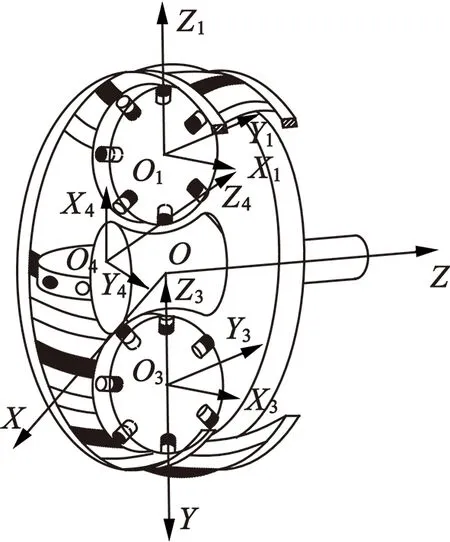
图6 系统坐标系与行星轮坐标系间关系
由图6可以看出,系统坐标系O-XYZ与各行星轮坐标系O-XjYjZj的坐标变换关系可齐次坐标变换得到。其中点(X1,Y1,Z1)与点(X,Y,Z)的变换关系:
式中:Rot(X, 90°)为绕X轴转动的旋转算子;Trans(0,-R,0)为齐次坐标变换的平移算子。R为行星轮坐标系原点到系统坐标系原点的距离。
对各行星轮坐标系的坐标进行齐次坐标变换后,在系统坐标系下对其产生各磁场分量进行叠加,可以得到爪式转子磁场强度:

选取超环面电机的主要结构参数r=39.5 mm,R=90 mm,n=8,m=4,Br=1 T,由式(12)对爪式转子与内外定子间电磁啮合处的气隙圆周磁场强度进行求解,得到蜗杆内定子喉部圆周截面上内外气隙圆周上的磁场强度,如图7所示。
由图7可以看出,爪式转子与内外定子电磁啮合的气隙圆周上磁场强度分布与行星轮个数有关;由于NS极是成对均布在行星轮圆周上的,所以内外气隙电磁啮合处磁场在圆周方向上是相同的;沿内外气隙圆周方向的规律性也验证了由磁齿坐标系到超环面电机系统坐标系间坐标变换的正确性。基于此,可以对超环面电机系统坐标系下任意空间点处的磁场分布进行解析计算。
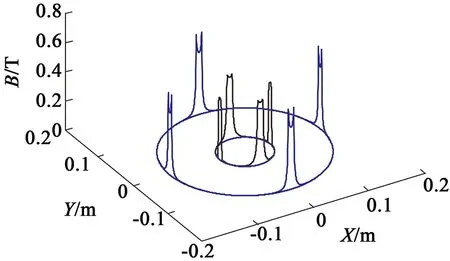
图7 内外气隙圆周磁场强度
5 结 语
爪式转子是新型超环面电机的核心部件,本文在对该种电机结构原理分析的基础上,建立了其上磁齿的等效电流模型,利用齐次坐标变化原理推导了该电机系统各坐标系下磁场强度的表达式,对爪式转子的磁场分布进行了解析计算,得到了爪式转子与内外定子间气隙磁场的分布规律,该结果为后续分析计算超环面电机的转子与内外定子间的电磁力奠定了基础。
[1] 郑德林,李华敏.端面谐波步进电机的研究[J].机械工程学报,1993,29(5):96-98.
[2] ZHOU H,CHEUNG E H M.Analysis and optimal synthesis of hybrid five-bar linkages[J].Mechatronics,2001,11(3):283-300.
[3] KUEHNLE M R,PEEKEN H,TROEDER C,et al.The toroidal drive[J].Mechanical Engineering,1981,32(2):32-39.
[4] XU Lizhong,FAN Sunhou.Design and torque control for electromechanical integrating toroidal drive[J].Mechanism and Machine Theory,2006,41(2):230-245.
[5] YAO Ligang,DAI J S,WEI Guowu,et al.Comparative analysis of meshing characteristics with respect to different meshing rollers of the toroidal drive[J].Mechanism and Machine Theory,200,41(7):863-881.
[6] 周守勇,刘欣,隋修武,等.混合励磁超环面电机结构分析与设计[J].微特电机,2014,42(7):8-11.
[7] 汤双清,陈习坤,唐波.永磁体空间磁场的分析计算及其在永磁磁力轴承中的应用[J].大学物理,2005,24(3):32-36.
Magnetic Field Analytical Calculation of the Claw Rotor for a New Type Toroidal Motor
LIUXin,HUANGKai
(Tianjin Polytechnic University,Tianjin 300387,China)
The claw rotor is the intermediate drive mechanism of the new type toroidal motor, and also the power output mechanism of the motor.Considering the special structure of the rotor, the equivalent model of the magnetic teeth was built based on the equivalent current method, and the model was verified by the finite element magnetic field simulation.The calculation formulas of the magnetic field in planet wheel coordinate and toroidal motor system coordinate were derived from the homogeneous coordinate transformation principle, the magnetic field distribution of the inner and outer air gap was calculated and the distribution was obtained, and the feasibility of the analytic method was verified.This study provides theoretical basis for the calculation of electromagnetic force of the novel motor.
claw rotor; toroidal motor; equivalent current method; homogeneous coordinates
2015-08-23
山西省科技攻关项目(2011032102602)
TM35
A
1004-7018(2016)09-0042-04
刘欣(1981-),女,博士,讲师,主要从事超环面电机系统研究。