光纤陀螺在车载惯性平台稳定回路中的仿真
2016-12-20吴彦林蒿俊晓
刘 义,吴彦林,蒿俊晓
(1.中国北方车辆研究所,北京 100072;2.白城兵器试验中心,吉林白城 137001;3.乌兰察布广播电视大学,内蒙古乌兰察布 012000)
光纤陀螺在车载惯性平台稳定回路中的仿真
刘 义1,吴彦林2,蒿俊晓3
(1.中国北方车辆研究所,北京 100072;2.白城兵器试验中心,吉林白城 137001;3.乌兰察布广播电视大学,内蒙古乌兰察布 012000)
为了延长车载惯性平台的使用寿命并提高其稳定精度,在原有平台机械结构的基础上,提出采用光纤陀螺代替原有的挠性陀螺作为惯性平台的敏感元件,并重新建立了平台系统稳定回路的数学模型。仿真研究表明该数字稳定回路具有较好的动态和稳态性能,能够满足系统的设计要求。经实验验证,该光纤陀螺惯性平台系统已实现功能要求。
光纤陀螺;惯性稳定平台;PID;控制回路
惯性平台系统是战车火控系统的主要部件之一,惯性稳定平台系统的性能直接关系到火控系统瞄准精度。现有的车载惯性稳定平台系统采用静压气浮(或静压液浮)单自由度陀螺仪或二自由度挠性陀螺作为敏感元件,但是这种惯性仪表工作寿命短,价格昂贵,维修费用高[1]。光纤陀螺是全固态光学陀螺,与传统的机电陀螺相比,具有显著特点:结构简单、零部件少、仪器牢固稳定,具有较强的耐冲击和抗加速度的能力;无运动部件、不存在支撑系统,因而不存在磨损问题,具有较长的使用寿命;尺寸小、质量轻、功耗低、价格便宜。1990年美国学者A Matthews提出光纤陀螺已经具备应用在惯性测量单元的条件[2],2015年国内学者母兴涛对由光纤陀螺构成的惯性稳定回路进行关键技术分析并建立了仿真模型[3]。目前光纤陀螺在国外已经发展成为惯性导航的主流仪表之一,我国也将其列为惯性技术领域重点发展的技术之一,而且已经成功应用在捷联惯导系统中。因此光纤陀螺应用到车载惯性稳定回路中也将成为必然的趋势。
1 光纤陀螺惯性平台稳定回路的组成与建模
车载上反射镜惯性平台稳定回路的主要功能是为了稳定瞄准线不受车体运动的干扰使瞄准线始终稳定且精确地瞄准目标。惯性平台稳定回路主要是由陀螺、功率放大器、直流电机和负载组成的一个闭环回路。以垂直(水平)向稳定为例,当惯稳平台发生垂直(水平)向摆动即有干扰力矩Mf输入时,陀螺相对惯性空间产生一个角度差信号E,此信号经过陀螺固有环节T(s)输出给回路校正环节G(s),经PWM功率放大后驱动直流电机D(s)转动而使瞄准线保持稳定。当回路瞄准目标时,即有输入信号R时,陀螺相对惯性空间也会产生一个角度差信号E,同样,此信号也得经过上述环节以使瞄准线精确跟随瞄准信号。惯性稳平台稳定回路闭环控制框图如图1[4]所示。
由直流力矩电机的工作原理可得其控制图如图2所示,其中:J为折算到电机转子上的转动惯量;Tm为电机的机械时间常数;Te为电机的电气时间常数;Cm是电机力矩系数;Ce是电机反电势系数;Ra是电机电枢的电阻[5]。

图1 惯性稳平台稳定回路闭环控制框图

图2 直流电机控制方框图
本文以垂直向的惯性平台稳定回路为例进行研究,垂直向直流电机参数如下:

所以可知:
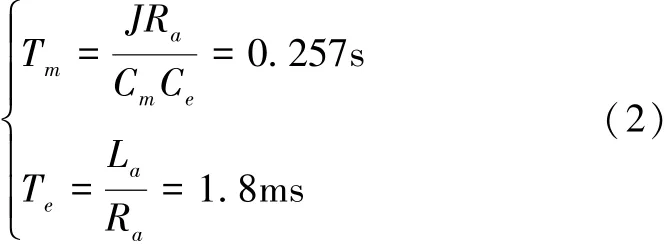
因此带负载的垂直向直流电机的数学模型为:

光纤陀螺的传递函数如下:

由于光纤陀螺输出的信号是速率信号,所以应将其输出信号进行积分以变成角度值给PID校正网络处理。由此可得到如图3所示的垂直向惯性平台稳定回路的数学模型[6]。
此外,在垂直向稳定回路中,二分之一减速机构[7]也会产生一个比较小的干扰力矩(低频时可以忽略),其数学模型如图3中所示。图3中R为惯性稳定回路输入信号,Y为电机带动负载转过的角度,Mf为回路的干扰力矩。

图3 垂直向惯性平台稳定回路的数学模型
2 光纤陀螺惯性平台稳定回路的仿真
为了在应用前得到采用光纤陀螺的可行性,本文对采用光纤陀螺建立的惯性平台稳定回路进行仿真研究,根据垂直向惯性平台稳定回路的数学模型可建立Simulink仿真框图[8],如图4所示。

图4 采用光纤陀螺的垂直向惯性平台稳定回路仿真框
1)输入阶跃信号时的仿真结果,如图5、图6
该光纤陀螺误差0.02mil,设PID控制器参数kp=0.5,ki=0.05,kd=30。其中输入的阶跃信号R=0.05rad。
由仿真结果可知系统阶跃响应的超调量Sigma=25.483%,上升时间Tr=0.019s,进入终值误差范围为±5%的稳态调节时间Ts005=0.08s,进入终值误差范围为±2%的稳态调节时间Ts002=0.0935s,终值误差e<0.025mil。
2)垂直向惯稳回路的抗干扰性能仿真
为了验证PID校正的垂直向惯稳回路的抗干扰能力,在电机的输出力矩处即电机转子上(如图3中干扰所加位置)加一正弦干扰力矩,其幅值为150g·cm,频率为2Hz。同时,令输入R=0,PID参数同1)中所设的一样,则回路输出响应曲线如图7所示。

图5 垂直向惯稳回路的阶跃响应曲线
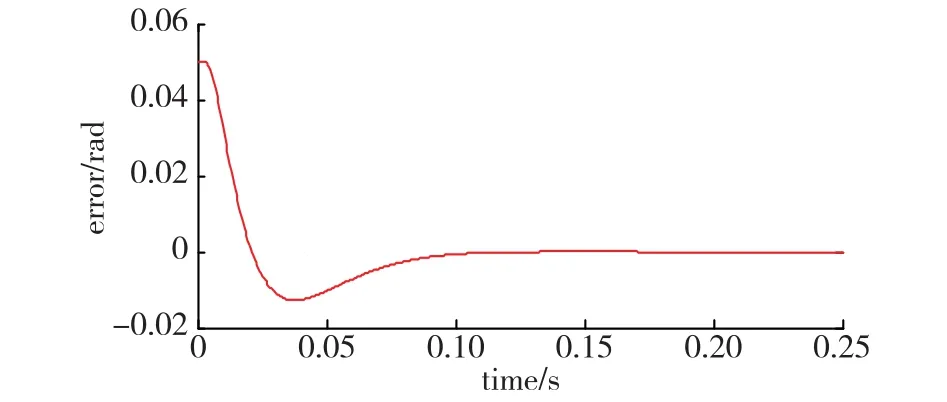
图6 垂直向惯稳回路的阶跃响应误差曲
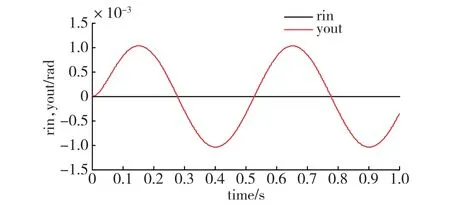
图7 加正弦干扰力矩时的垂直向惯稳回路响应曲线
3 结束语
本文建立了光纤陀螺惯性平台稳定回路模型,并采用经典的PID控制算法仿真验证了光纤陀螺的可行性。仿真研究表明,采用光纤陀螺的车载惯性稳定平台稳定回路在超调量、响应速度以及稳态误差方面满足要求,在抗干扰能力方面也表现良好,由于本文只是对光纤陀螺做了可行性研究,并没有针对实际应用采用更合适的控制算法,所以采用光纤陀螺的惯性平台的稳定精度还有很大的提升空间。目前,经过相关的应用试验,也已证明光纤陀螺不仅可靠性高,在提升惯性平台稳定精度方面也表现突出。下一步的主要工作是进一步提高其鲁棒性和动态性能。
[1] 周璇.陀螺稳定平台数字控制系统设计[D].哈尔滨:哈尔滨工程大学,2008.
[2] A Mathews.Utilization of Fiber Optic Gyros in Inertial Measurement Units[J].Navigation,1990,37(1):17⁃38.
[3] 毋兴涛,潘军,裴态,等.光纤陀螺稳定平台控制回路设计分析[A]∥中国惯性技术学会学术年会[C],2015.
[4] 傅建纲.惯性平台稳定回路的设计研究[D].哈尔滨:哈尔滨工程大学,2005.
[5] 刘义,郭建都,梅林.基于离散滑模变结构的惯稳回路控制研究[J].指挥控制与仿真,2010,32(6):113⁃115.
[6] 刘义,郭建都,金倩.模糊PID控制的惯性稳定回路[J].火力与指挥控制,2012,37(2):105⁃106.
[7] 韩兆福.车载观瞄系统[M].北京:装甲兵工程学院,2006.
[8] 刘金琨.先进PID控制Matlab仿真[M].第2版.北京:电子工业出版社,2004.
Simulation of FOG Used in Stabilization Loop of Vehicle⁃borne Inertial Stabilization Platform
LIU Yi1,WU Yan⁃lin2,HAO Jun⁃xiao3
(1.China North Vehicle Research Institute,Beijing 100072;2.Baicheng Weapon Test Center,Baicheng 137001;3.Ulanqab Radio and Television University,Ulanqab 012000,China)
In order to prolong the service life of vehicle⁃borne inertial stabilization platform and improve it’s stabilization ac⁃curacy,an improved method of using fiber optic gyroscope(FOG)instead of flexible gyroscope on the basis of the mechanical structure of the original platform,the mathematical model is established after that.Simulation results show that the digital stabi⁃lization loop of the platform have good dynamic and steady performance to meet design requirement.By primary proving experi⁃mentation,the inertial stabilization platform used FOG can meet requirement.The design has been used in a project.
fiber optic gyroscope;inertial stabilization platform;PID;control loop
TJ811;E917
A
10.3969/j.issn.1673⁃3819.2016.06.019
1673⁃3819(2016)06⁃0093⁃03
2016⁃05⁃28
2016⁃10⁃13
刘 义(1982⁃),男,内蒙古察哈尔人,硕士,工程师,研究方向为坦克火控系统。
吴彦林(1979⁃),男,工程师。
蒿俊晓(1977⁃),女,讲师。