基于Multi⁃agent协商的多干扰机资源管理
2016-12-20刘玲,徐旺
刘 玲,徐 旺
(1.成都大学信息科学与工程学院,四川成都 610106;2.电子信息控制重点实验室,四川成都 610036)
基于Multi⁃agent协商的多干扰机资源管理
刘 玲1,徐 旺2
(1.成都大学信息科学与工程学院,四川成都 610106;2.电子信息控制重点实验室,四川成都 610036)
多干扰机协同是组网雷达对抗的一种重要方法。针对多干扰机协同中面临的数据传输率、时效性等因素所引起的干扰资源管理问题,建立了基于中心控制协商和公约协商的干扰资源管理模型,并给出了相应的协同算法与仿真。仿真结果表明:两种方法在组网雷达对抗中均能取得良好的干扰效果及较低的漏威胁目标信号脉冲比例。其中,基于公约的Multi⁃agent协商在组网干扰资源管理方面具有更好的可行性,其效果优于基于中心控制协商的方法。
干扰资源管理;Multi⁃agent协商;协同对抗;组网雷达
随着组网雷达系统在世界范围内的广泛研发与部署,如何有效对抗组网雷达系统已成为一个日益棘手的问题,由此提出了利用干扰机进行对抗的方法。由于干扰资源的有限性,如何利用多干扰机联网协同对抗组网雷达系统成为研究的热点。
由于数据传输和时效性等方面因素,目前公开的干扰资源管理方法,主要集中在干扰资源如何分配方面,如以干信比为目标函数,采用优化算法进行干扰资源分配等[1⁃5],而在干扰资源分配后,关于干扰机间如何深入协同的文献较少[6]。
面对组网雷达系统,干扰机间须协同地完成对抗任务,因此组网干扰机构成了一个智能系统。在此启示下,本文将多干扰机对抗组网雷达的过程,构建为具备某种目标的Multi⁃agent协商过程,并采用了基于中心控制和基于公约的Multi⁃agent协商方法对该过程进行了建模。本文分析了组网干扰机对抗组网雷达的过程,指出了该过程中面临的问题与挑战。并基于这两种Multi⁃agent协商的方法,对组网干扰过程中的资源管理问题进行了建模,通过一组仿真实例,对相关模型算法进行了验证。
1 组网对抗
如图1所示,为执行某些特定任务,我方空中兵力平台需要突破敌方组网雷达系统。然而,由于敌方组网雷达的数量优势,以及干扰机时间资源的有限性,一部干扰机难以应付多部雷达。这种情况下,需要多部干扰机进行协同对抗,一种较直接的协同方法如下:
1)一部干扰机扮演“观察者”与“协调者”身份,将其记为中心干扰机,其余记为从干扰机;
2)当威胁信号到达时,中心干扰机将相应地干扰任务,如威胁雷达参数与干扰方法等,分配给其他的干扰机。具体的分配方法很多,可以采用基于遗传算法[2]、基于动态规划[4]、基于神经网络[9]等方法的干扰资源分配。

图1 组网对抗场景示意图
3)当一个任务到达时,相应地从干扰机执行相应干扰任务,并对中心干扰机进行反馈。
中心干扰机发送的干扰任务中,包含的雷达信号参数有频率、脉宽、重频、…、极化方式等,干扰参数有干扰方式、干扰时长等,这些参数定义如表1和表2所示。

表1 雷达信号参数描述
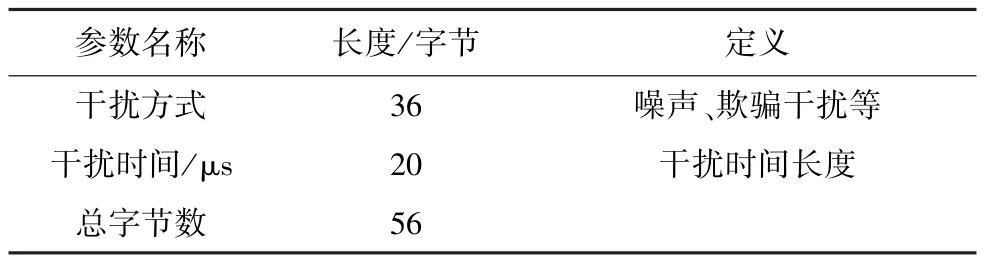
表2 干扰参数描述
若时间与传输速率允许,该协同方法可以有效地解决干扰机间的资源管理问题。然而,若每秒有几千甚至几百万的威胁脉冲信号,则需要MB/s甚至GB/s量级以上的传输率,这其中还不包含消息报文头、从干扰机的反馈消息等。另外,中心干扰机下发任务到从干扰机需要ms量级以上的信号传输与处理时间。再者,当两个雷达的信号到达时间间隔较短时,中心干扰机不能快速进行处理与任务下发,如图2所示。

图2 两个雷达信号在较短时间间隔内相继到达的示意图
图3是一个预警雷达的扫描示意图,其中,虚线部分为干扰设备能截获雷达信号的部分。若中心干扰机下发雷达参数和干扰参数至从干扰机的时间过长,从干扰机很可能漏掉对当前截获到雷达信号的干扰。

图3 预警雷达扫描示意图
除时间和数据传输外,由于干扰资源的有限性,还需要对任务分配的机制进行优化。因此,本文基于Multi⁃agent的协商,提出了一种解决上述问题的优化模型。
2 基于Multi⁃agent协商的干扰资源管理
将组网对抗中的干扰机视为具有共同任务的Agent,干扰资源管理问题等价于Multi⁃agent联合任务规划问题。如前所述,由于时间、数据传输率等因素的限制,Agent间不能进行实时动态交互与控制。为了节约资源,观察者干扰机还需要扮演规划角色。记扮演“观察者”与“规划者”的干扰机为Center⁃agent,其余干扰机为Sub⁃agent,则在联合任务规划中,agent间需要遵从如下规则:
·鉴于时效性和数据传输率的限制,Agent间不能实时信息交换;
·由于干扰资源的有限性和敌方组网雷达的数量优势,Agent之间应高度协同。
上述规则表明,Center⁃agent应观察、识别和记录威胁信号,制定相应对抗策略,并动态地将策略下发给相应Sub⁃agent。但这种策略下发行为不能过于频繁,以至于超过了数据传输的限制,即策略的制定与下发不能是实时的。与此同时,Sub⁃agent之间应以尽量少地传输信息为前提,进行协同。
基于中心控制协商和基于公约协商是Multi⁃agent任务资源管理中常用的两种办法,在Multi⁃agent任务规划中有广泛应用[7]。为了实现多干扰机间对抗组网雷达系统的协同,本文采用了这两种协商方式对干扰资源进行管理。
2.1 基于中心控制协商的干扰资源管理
基于中心控制协商的协同干扰基本处理框架如图3所示。其中,Center⁃agent负责观察环境,分选、识别威胁信号,并将威胁信号存入数据库(Data Base,DB)中。然而,由于时间和数据传输率的限制,仅当威胁信号发生重大变化或距离上次干扰策略制定时间太久时,Center⁃agent才进行依据自身知识库(Knowledge Base,KB)进行干扰策略的制定与下发。与此同时,当新的干扰策略达到时,Sub⁃agent立即更新其数据库中相关干扰参数,如干扰目标和干扰样式等。当辐射源信号到达时,结合自身知识库中的某种规则,Sub⁃agent进行识别威胁,并对威胁辐射源作出相应干扰。
基于中心控制协商的干扰资源管理,包含以下三个步骤:
Step1(初始化):添加威胁信号数据库,设置威胁评估、策略下发的相关参数如下:
K表示需要干扰的信号目标数量;
CurJamObj表示当前干扰的信号目标集;
MinThD表示干扰信号目标的最小威胁度;
Dec-Tim表示最近一次干扰决策时间;
Dec-Tim-Interl表示进行两次干扰策略制定的最大时间间隔;
Deta-time表示Sub⁃agent进行干扰目标切换的最小时间间隔;
Maxchg-Num表示进行干扰策略制定时,所容许的威胁辐射源改变的最大数量。当辐射源改变数量小于Maxchg-Num,Center⁃agent不需要重新进行策略制定。
N表示Sub⁃agent的数量,即从干扰机数量。

图4 基于中心控制协商的协同干扰基本处理框架图
Step2(Center⁃agent干扰策略制定):Center⁃agent干扰策略制定的过程可以分为:观察、识别威胁信号,策略制定,策略下发。该过程可以描述为Algorithm 1.

Algorithm 1中plan(JamObj,N)是干扰资源分配函数,可以是基于遗传算法[2,5]、动态规划[4]、贴近度[8]、神经网络[9]等方法的干扰资源分配。
Step3(Sub⁃agent干扰响应):当干扰策略到达时,Sub⁃agent立即进行干扰策略的更新。当辐射源信号到达时,Sub⁃agent依据干扰策略进行响应。该过程可以描述为Algorithm 2.
与基于公约协商的方法相比,基于中心控制协商的干扰资源管理没有那么实时,具备了可行性。但是,在Center⁃agent进行干扰策略制定与下发后,Sub⁃agent仅能对自己负责的干扰目标进行干扰响应。资源管理协调能力随环境的变化较大,因此,对Center⁃agent处理的频率要求较高。

2.2 基于公约协商的干扰资源管理
与基于中心控制协商的干扰资源管理相比,基于公约协商的干扰资源管理下,通过事先对Sub⁃agent设计了某种默契,即所有Sub⁃agent必须遵守的一些公约。考虑到数据传输率和时间的限制,基于公约协商的干扰资源管理进行了如下处理。
1)Center⁃agent通过广播的方式,向每个Sub⁃agent发送所有Sub⁃agent的干扰策略和目标信号表。目标信号对象如表3所示,其中Sij的定义见表1。
当辐射源信号到达时,各个Sub⁃agent进行威胁识别,搜索目标信号表格(表3),确认它属于哪个Sub⁃agent的目标信号。与基于中心控制协商(Algorithm 1和Algorithm 2)不同,如果相应的Sub⁃agent在干扰其他威胁对象,其他的处于空闲状态的Sub⁃agent将替之进行干扰。记t时刻收到威胁信号为Sij,即Sub⁃agent i的第j个干扰目标信号,Sub⁃agent间将采用以下的公约进行协同。

表3 目标信号表
2)每个Sub⁃agent记录所有Sub⁃agent的干扰状态,如表4所示。其中,jk表示Sub⁃agent k正在干扰的目标,其取值为表3中目标信号的下标;ik为Sjk原本所属Sub⁃agent的编号;tk表示Sub⁃agent k开始对信号Sjk进行干扰的时间,若Sub⁃agent ik处于空闲状态,则对应行取值全为零。

表4 Sub⁃agent状态记录表
当信号Sij到达时,各个Sub⁃agent按如下的公约进行干扰响应。
①若Sub⁃agent i处于空闲状态,则Sub⁃agent i直接对Sij进行干扰响应,并广播其干扰的目标和时间如表5所示。各Sub⁃agent收到消息后,更新各自存储的状态记录表:第i行的三个取值分别为i、j和t。

表5 传输参数
②若Sub⁃agent i处于干扰状态,并且某些其他Sub⁃agent处于空闲状态,则
·按mod(i+1,N),mod(i+2,N),…,mod(i+N-1,N)的顺序对状态记录表进行搜索,直到某个Sub⁃agent mod(i+k,N)处于空闲状态,则Sub⁃agent mod(i+k,N)对Sij进行干扰响应,并广播表5所示的参数。其中mod(x,y)表示x除以y取余。
·其他Sub⁃agent收到消息后,更新相应的状态记录表格:第mod(i+k,N)行的三个取值分别为i、j和t。
③若所有Sub⁃agent均处于干扰状态,则
·若某些Sub⁃agent将在时间阈值ΔT内完成当前正在进行的干扰,则按mod(i+1,N),mod(i+2,N),…,mod(i+N-1,N)对干扰状态记录表进行顺序搜索,具有最早完成时间的Sub⁃agent对Sij进行干扰响应,并广播其干扰参数,各Sub⁃agent进行状态记录表更新。
·否则,忽略Sij。
值得注意的是,当前时间超过某个Sub⁃agent的干扰结束时间时,所有Sub⁃agent将自动地将其状态记录表中相应Sub⁃agent的状态更新为空闲状态。利用这种方式,那些处于空闲的或不那么忙的Sub⁃agent将以较少的消息传递代价,实现对繁忙的Sub⁃agent进行帮助,从而实现了干扰资源再次协同与调度。
较之于基于中心控制的干扰资源管理,基于公约的情况下,增加了一定的通信代价,通信代价的大小与威胁信号的持续时间有关。
3 数据仿真及分析
为了验证基于两种协商方法的干扰资源管理的原理,本文设置了一个包含4部干扰机与8部雷达进行对抗的仿真场景,相关参数设置如表6和表7所示,其中各部雷达起始扫描方位均匀分布在[0,2π]内。

表6 雷达参数设置

表7 干扰机参数
假设所有雷达的3dB主瓣波束宽度为2.5°,主瓣天线增益为30dB,副瓣天线增益为-2dB。策略制定相关参数如表8所示,在设置如表2所示的干扰参数基础上后,获得了Center⁃agent对Sub⁃agent 1分配目标信号序列如图5所示。为了区分相邻两次目标信号,使用“----”和“——”相间表示相邻的两次目标信号。Sub⁃agent 2与Sub⁃agent 3的目标信号序列与Sub⁃agent 1类似。
[1],本文采用了基于遗传算法的干扰资源分配,其目标是使得雷达网对被掩护目标的定位精度最差,目标函数定义如下式所示。分配的频率为每秒一次。

表8 策略制定参数设置
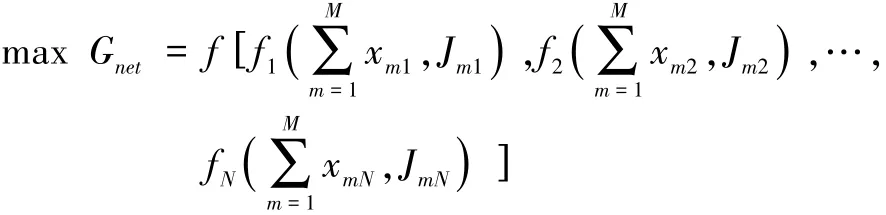
式中,f是指单站测量误差到雷达网GDOP的映射;GDOP为雷达网目标的定位精度,取值为东北天坐标误差的均方根,其详细计算见文献[1];f1,f2,…,fN是单部雷达接收干扰功率到测量误差映射;Jmn(n=1,2,…,N)为各干扰机到达雷达接收机的发射功率。
如图5所示,Center⁃agent更新所有Sub⁃agent的干扰目标信号的频率为1次/s,基于中心控制协商和基于公约协商的干扰资源管理效果,如图6所示。

图5 Sub⁃agent1的目标信号序列
图6表明,基于中心控制协商的干扰资源管理下,每个Sub⁃agent都可能有时很“忙”,有时却很“闲”。同时,某些Sub⁃agent在很忙的时候,其他Sub⁃agent却由于其负责的威胁目标信号没有到达而“无所事事”。与之相反,基于公约协商过程中,所有Sub⁃agent的干扰过程中时间上是均匀的,并且不可能出现某些Sub⁃agent很“忙”,而某些Sub⁃agent却无事可做的现象。最后,为了说明两种协商方法在干扰资源管理方面的效果,除了上述表6和表7所描述场景(记为场景1)外,本文还通过随机设置类似表7中RF、PRI、PW、扫描周期等相关参数,选择了其他3个场景(分别记为场景2、3、4),并与随机分配(分配的频率仍为1次/s,4部干扰机不区分成center⁃agent和Sub⁃agent,每部均分配两个目标信号)相比较,以检验两种方法在干扰资源管理中,漏干扰目标信号脉冲的比例,其结果如表9所示。
本文设置的场景均为飞机编队自卫干扰,漏干扰目标信号的比例即为没有完全覆盖到真实的飞机回波的脉冲比例,如图6所示。

图6 干扰效果示意
该结果表明,两种基于Multi⁃agent协商的干扰资源管理效果明显好于随机分配的效果,且基于公约协商的干扰资源管理漏干扰目标信号脉冲的比例明显小于其他两种方法。
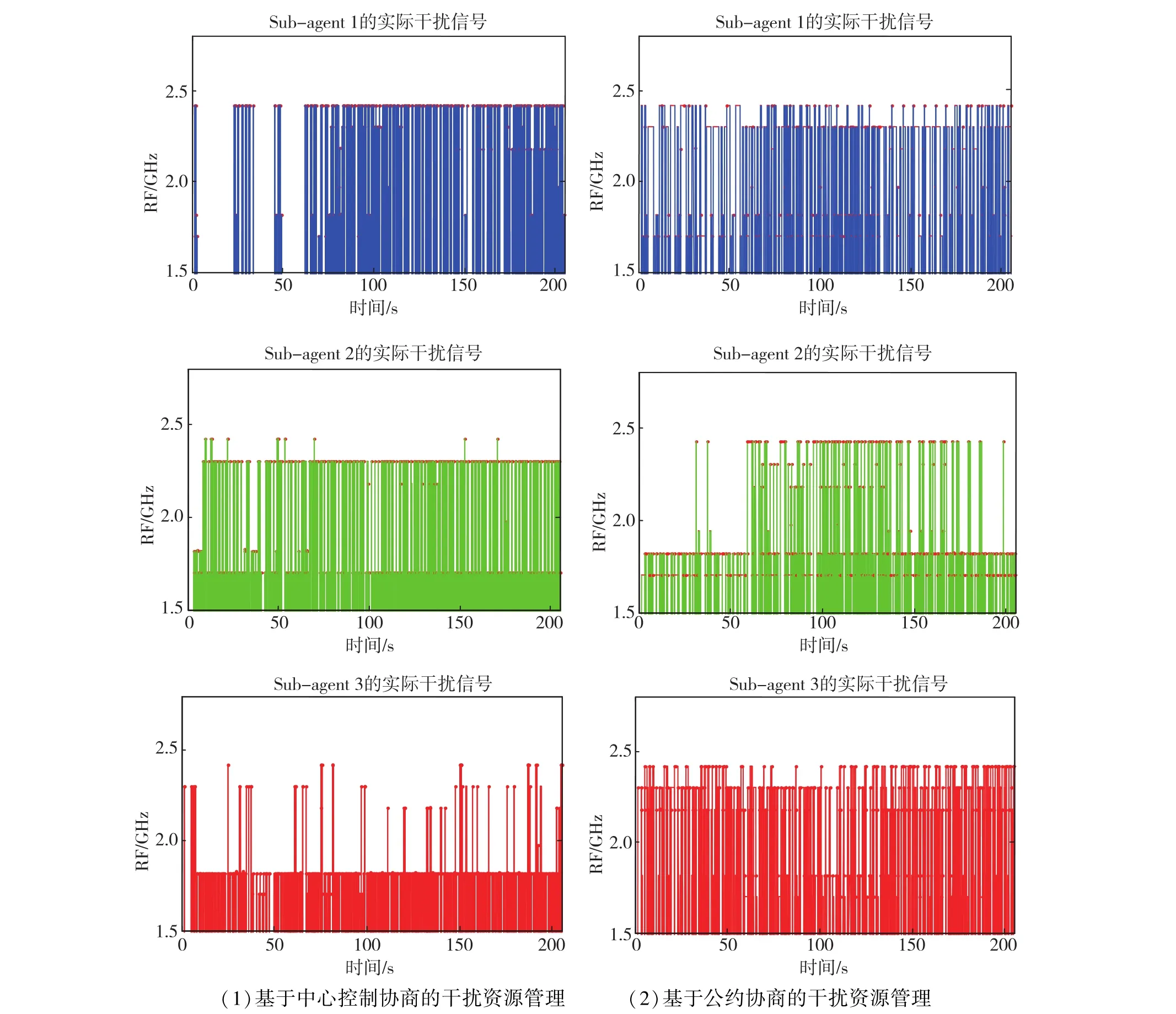
图7 Sub⁃agent的实际干扰信号
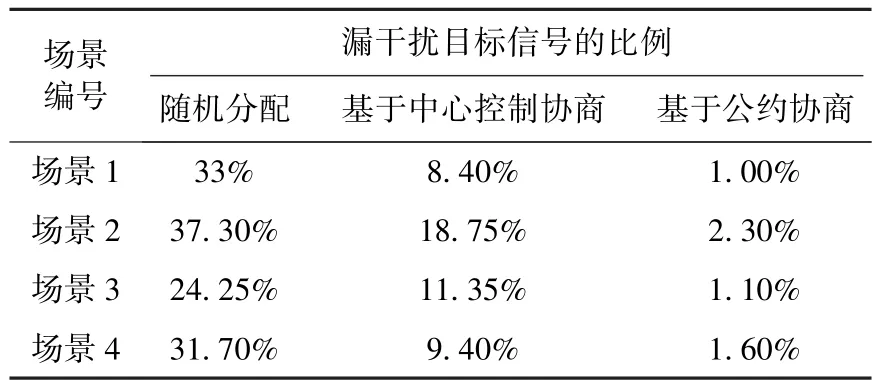
表9 漏干扰目标信号脉冲的比例
此外,以SinC函数为雷达方向图,根据雷达扫描周期、接收机灵敏度等参数,可以计算得到,较之于基于中心控制的协商方法,基于公约协商的干扰资源管理在场景中通信代价至多为83次/s,即705.5Byte/s的传输率,而这个代价是较易接受的。
4 结束语
本文在分析组网干扰资源管理问题的基础上,利用基于中心控制协商和基于公约协商等两种Multi⁃agent协商方法对组网干扰资源管理进行了建模,提出了相应的资源管理算法,并通过一组对抗场景验证了两种方法的原理有效性。下一步研究中,我们将进一步考虑个体特征,如干扰机1对雷达1的最好干扰方式是噪声干扰,而干扰机2的最好干扰方式是欺骗干扰,并且两者有不同的成功概率等,综合给出干扰机2帮助干扰机1时的条件与方式等。
参考文献:
[1] 张养瑞,李云杰,高梅国.协同干扰资源优化分配模型及算法[J].系统工程与电子技术,2014,36(9):1744⁃1749.
[2] XUE Yu,ZHANG Yi,ZHU Hao,et al.Efficiently ImmuneGeneticAlgorithmforSolvingCooperative Jamming Problem[J].Journal of University of Electronic Science and Technology of China,2013,42(3):453⁃458.
[3] 邱卫军,黎明也.多样式协同干扰的目标分配研究[J].中国电子科学研究院学报,2012,7(6):586⁃589.
[4] 姜宁,胡维礼,王基组,等.雷达干扰资源分配的模糊多属性动态规划模型[J].南京理工大学学报(自然科学版),2003,27(3):314⁃317.
[5] 郭小一,袁卫卫,黄金才.雷达干扰资源一对多分配方法[J].火力与指挥控制,2008,33(12):22⁃25.
[6] XU Wang,CHANG Jin⁃dan,SHI Xiao⁃wei,et al.Multi⁃agent Coordination for Resource Management of Netted Jamming[C].Guang Zhou:Lecture Notes in Computer Science,2014:446⁃456.
[7] 蔡自兴,徐光佑.人工智能及其应用[M].北京:清华大学出版社,2010:332⁃333.
[8] 吕永胜,王树宗,王向伟,等.基于贴近度的雷达干扰资源分配策略研究[J].系统工程与电子技术,2005,27(11):1893⁃1894.
[9] 房明星,王杰贵,朱宇.基于Hopfield神经网络算法的雷达干扰资源分配[J].火力与指挥控制,2014,39(2):76⁃80.
Resource Management of Multi⁃jammer Based on Multi⁃agent Coordination
LIU Ling1,XU Wang2
(1.School of Information Science and Engineering,Chengdu University,Chengdu 610106;2.Science and Technology on Electronic Information Laboratory,Chengdu 610036,China)
Multi⁃jammer cooperative confrontation is an important method for enemy netted radar countermeasures system. According to the jamming resource management problem,which is caused by the data transfer rate and time limitation in multi⁃jammer cooperative confrontation,two jamming resource cooperative models based on Center Control Coordination and Commitments and Conventions are built.In addition,corresponding cooperative algorithms are proposed and simulations are considered.The results show that the two methods could get a good performance in netted radar countermeasures,and both have lower missing rate of threat pulses.Besides,the simulation results validate that the cooperative based on Commitments and Conventions has better feasibility in netted jamming resource management,which has a better performance than the method based on Center Control Coordination.
jamming resource management;Multi⁃agent coordination;cooperative confrontation;netted radar
TN959;E917
A
10.3969/j.issn.1673⁃3819.2016.06.012
1673⁃3819(2016)06⁃0057⁃07
2016⁃09⁃27
2016⁃10⁃20
刘 玲(1988⁃),女,四川内江人,硕士,助教,研究方向为模式识别与智能系统。
徐 旺(1987⁃),男,硕士,工程师。