基于SRUKF的汽车毫米波雷达目标跟踪方法
2016-12-20梁波郭剑鹰
梁波,郭剑鹰
(华域汽车系统股份有限公司,上海 200041)
基于SRUKF的汽车毫米波雷达目标跟踪方法
梁波,郭剑鹰
(华域汽车系统股份有限公司,上海 200041)
SRUKF滤波器能够解决滤波过程非线性问题,以及在更新步骤中误差协方差矩阵奇异导致的发散问题,在目标跟踪算法中得到了广泛应用。同时,针对汽车毫米波雷达目标跟踪时状态方程线性和测量方程非线性的特点,提出了一种改进的快速SRUKF算法。相对于常规SRUKF,该方法减少了计算量,且滤波精度没有下降,适用于嵌入式汽车雷达模块的实时信号处理。
SRUKF滤波器;汽车雷达;目标跟踪;雷达数据处理
随着人们对汽车舒适性和安全性要求越来越高,能够实现危险预警和主动控制的先进驾驶辅助系统正成为众多主机厂和一级供应商研究的焦点。汽车用毫米波雷达传感器因其具备测速准确、测量距离远、环境适应能力强的优点,而被广泛研究和应用。国外众多一级供应商如德国博世、德国海拉等已经有成熟的77GHz/24GHz汽车雷达产品面世。近年来,国内的一些高校和企业,针对汽车毫米波雷达的天线设计和算法设计展开研究,取得了较大的进展。
常用的基于LMCW的汽车雷达利用多普勒现象进行测速和测距,信号处理后可直接得到目标的径向速度、径向距离和方位角,后续的数据处理算法是在笛卡尔坐标系下进行,从而需要通过非线性转换实现状态向量到观测向量的变换。因此,汽车毫米波雷达的目标跟踪大多采用非线性滤波器。常用的滤波方法有α-β滤波器、卡尔曼滤波器(KF)、扩展卡尔曼滤波器(EKF)、无迹卡尔曼滤波器(UKF)、容积卡尔曼滤波器(CKF)等[1]。扩展卡尔曼滤波(EKF)[2]通过将非线性函数一阶泰勒近似并忽略高阶项,将非线性问题线性化,这种方法会导致系统产生较大的误差,甚至不稳定。无迹卡尔曼滤波(UKF)[2]采用确定性采样的形式来逼近状态的后验分布,从而对系统状态的均值和协方差的估计更为准确。UKF在更新步骤执行的状态误差协方差矩阵的Cholesky分解,导致滤波器在协方差矩阵非正定时无法分解。SRUKF[3-4]通过将协方差矩阵在算法迭代执行之前进行Cholesky分解,获得平方根矩阵,进而在算法迭代过程中,将平方根矩阵进行非线性迭代,自动更新,大幅度降低了矩阵非正定的风险。
本文提出一种SRUKF的改进算法,在滤波器预测阶段,利用目标运动线性方程和Kalman滤波器进行状态和误差协方差预测;在更新阶段,利用预测值构造Sigma点,并以SRUKF滤波器方程更新目标状态和误差协方差,降低了计算量[5]。
1 系统模型
由于车辆运行的非突变性,可假设目标车相对于本车作常加速运动,对于观测采样周期为d t的离散时间动态系统,其线性运动状态方程和非线性观测方程分别为
假设过程噪声和观测噪声为加性零均值高斯白噪声。目标车辆运动状态可以用一个6维向量表示,Xk=其中,x是目标的横向距离,vx=是横向速度,ax=是横向加速度,y是纵向距离,vy=是纵向速度,ay=是纵向加速度。
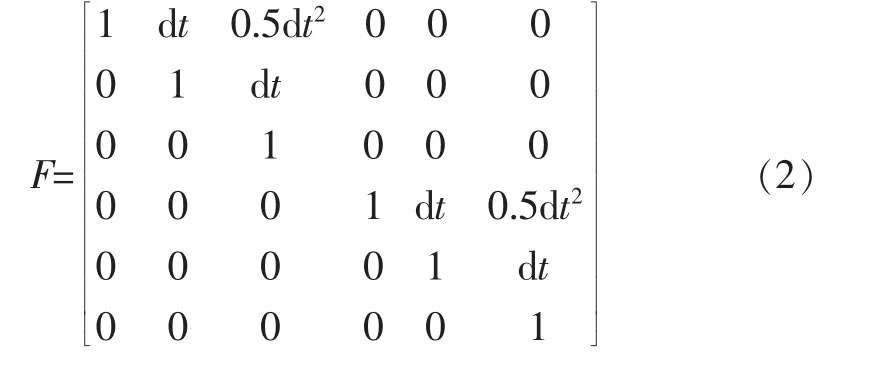
运动模型采用常加速(CA)模型[6],过程函数使用F矩阵表示,两次测量的时间间隔d t作为运动方程的唯一参数,目标运动方程如下[5]
过程噪声协方差矩阵Q为对角阵

而汽车毫米波雷达单个周期可测得的目标信息是zk=[r,α,v]T,包含目标距离r,目标角度α,目标径向速度v。测量模型是一个非线性函数,无法用矩阵形式表示,状态空间到测量值空间的映射表示如下

测量噪声协方差矩阵R为对角阵

2 SRUKF算法的改进
UKF滤波器的核心是UT变换,其主要作用是对均值为u,误差协方差矩阵为P的服从高斯分布的随机变量x,生成若干固定采样sigma点,经过非线性变换后,可以得到变换后逼近高斯分布的随机变量均值和误差协方差矩阵,且变换函数线性度越强,则变换后的分布越接近高斯分布,其逼近的均值和方差越接近实际分布函数的参数。
传统UKF滤波器、SRUKF滤波器一般在时间更新和测量更新阶段都是用了UT变换。由于汽车毫米波雷达目标跟踪中运动方程的线性,改进的快速SRUKF滤波器基本思想是[5]:在预测阶段使用线性卡尔曼滤波器的预测方程,在更新阶段采用SRUKF滤波器的更新方程计算增益、更新状态和误差协方差矩阵。改进的快速SRUKF滤波器算法步骤如下[3]。
1)初始化
式中:X0均值为,平方根方差为SX,0。
2)状态及误差平方根一步预测
3)产生Sigma点并计算权值

4)量测值及协方差预测

由步骤3)中得到的Wm和测量值预测值σy,k+1可得到测量值的预测值
5)计算卡尔曼增益
卡尔曼增益Kk+1的计算是卡尔曼滤波器的核心步骤,它决定了状态预测值与传感器测量值的可信度大小。

6)状态及协方差更新

3 仿真、试验及数据分析
仿真在MATLAB下进行,雷达模块处于静止状态,单个目标车辆相对于雷达的运动轨迹如图1所示,比较了常规SRUKF与改进SRUKF的滤波精度和运算耗时。仿真时,2种方法采用添加相同高斯白噪声的测量误差数据,根据实际使用的24GHz雷达前端性能,所添加的测量距离误差均方根为1.0m,角度均方根值为1°,速度均方根值为0.05m/s,刷新周期50ms。
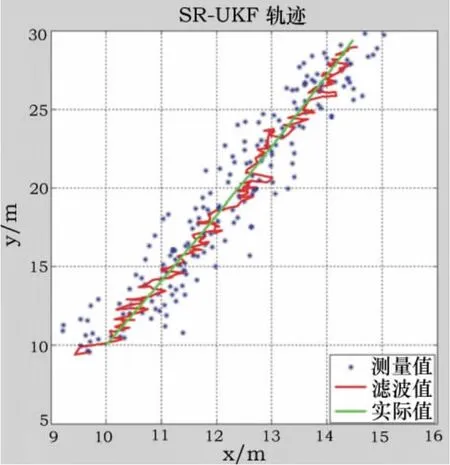
图1 仿真场景
进行了10 000次蒙特卡罗试验。试验分析了单次滤波前后的误差分布,统计SRUKF和改进SRUKF 2种滤波器在滤波前后的误差均值和误差均方根值,并统计了2种滤波算法的平均耗时。
图2中蓝色标识为测量误差分布曲线,红色标识为滤波后误差分布曲线。由误差分布曲线可见,滤波收敛速度较快,且误差分布比较均匀,基本保持在零均值附近,符合高斯分布的特点。试验统计了SRUKF和改进SRUKF 2种滤波器10 000次蒙特卡罗试验的滤波误差值,统计结果如表1所示。从表1中可见,2种方法误差统计值一致。试验表明,状态和误差协方差矩阵预测部分采用线性方程,与采用SRUKF的预测方程具有同等效果。
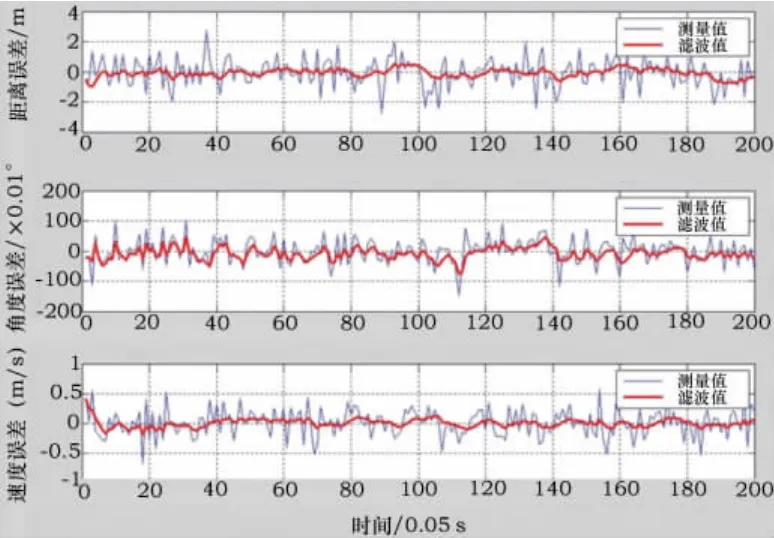
图2 滤波误差分布曲线

表1 SRUKF与改进SRUKF试验误差统计表
在MATLAB运行环境下对SRUKF和改进SRUKF 2种滤波器进行了10000次蒙特卡罗的试验,统计了2种滤波器的平均单次运算时间开销,在SRUKF算法下平均耗时0.0553s,应用改进SRUKF算法平均耗时0.0431s。由统计试验可见,改进算法的效率提高了20%左右。
将改进的SRUKF算法移植应用到DSP雷达信号处理平台上,结合雷达前端模块进行了行人的检测和跟踪试验,结果如图3所示。试验结果表明,改进的SRUKF算法对毫米波雷达实测数据具有较强的适应能力和较好的随机误差抑制效果。
4 结论
本文描述了SRUKF滤波器在汽车毫米波雷达目标跟踪上的应用,同时,为了降低计算量和提高系统实时性,提出了一种改进的快速SRUKF滤波器。该滤波器在预测阶段,利用Kalman滤波器方程进行状态和误

图3 雷达实测数据滤波效果图
差协方差预测,在更新阶段,利用预测值构造Sigma点,并以SRUKF滤波器方程更新目标状态和误差协方差,减少了1次UT变换。MATLAB的算法仿真和数据统计表明,该算法运算效率得到了提高,同时保持原有的滤波精度。算法移植到DSP平台上后,实测中有较好的跟踪效果和适应能力。
[1]Michael Sachse,HAF Radar development,IAV,2014.
[2]Gustafsson F,Hendeby G.Some relations between extended and unscented Kalman filters[J].IEEE Transactions on Signal Processing,2012,60(2):545-555.
[3]Merwe R V D,Wan E A.The square-root unscented Kalman filter for state and parameter-estimation[C]. Icassp.2001:3 461-3 464.
[4]Heuer M,Al-Hamadi A,Rain A,et al.Pedestrian tracking with occlusion using a 24 GHz automotive radar[C].International Radar Symposium.2014:1-4.
[5]刘华军,赖少发.汽车毫米波雷达目标跟踪的快速平方根CKF算法[J].南京理工大学学报,2016,40(1):56-60.
[6]肖雷,刘高峰,魏建仁.几种动目标运动模型的跟踪性能对比[J].火力与指挥控制,2005,32(5):106-109.
(编辑 陈程)
Target Tracking of Automotive M illimeter-W ave Radar Using SRUKF Filter
LIANG Bo,GUO Jian-ying
(Huayu Automotive Systems Co.,Ltd.,Shanghai 200041,China)
Square root unscented kalman filter(SRUKF)could solve the nonlinear estimation problem in filtering,and guarantees state covariance to be positive semi-definite during update process,thus is widely used in target tracking algorithm.This paper proposes a faster SRUKF algorithm which reduces computation than regular SRUKF without accuracy sacrifice,which is suitable for real-time signal processing on built-in vehicle radar module.
SRUKF filter;automotive radar;target tracking;radar data processing
463.675
A
1003-8639(2016)08-0042-03
2016-06-02;
2016-07-03
梁波(1982-),男,安徽巢湖人,硕士,长期从事汽车电子产品开发、嵌入式软件设计和数字信号处理;郭剑鹰(1973-),男,江苏张家港人,工学博士,长期从事计算机辅助制造、机器人及自动化、汽车电子产品开发、规划及管理。