基于C8051F061的太阳跟踪控制器设计
2016-12-19沙春芳
沙春芳
(盐城师范学院 新能源与电子工程学院,江苏 盐城 224002)
基于C8051F061的太阳跟踪控制器设计
沙春芳
(盐城师范学院 新能源与电子工程学院,江苏 盐城 224002)
针对目前采用的太阳跟踪控制器跟踪精度不高的问题,设计了一种基于C8051F061的双模式太阳跟踪控制器。该控制器将视日运动轨迹跟踪与采用四象限光电传感器的高精度光电跟踪相结合,精确计算、测量出太阳的方位角和高度角,通过方位控制步进电机和高度控制步进电机使电池板始终垂直于太阳光线,提高了跟踪精度,从而有效地提高太阳能利用率。实验结果表明,该控制器具有较高的跟踪精度。
太阳跟踪;四象限光电探测器;C8051F061;CAN总线
太阳能是一种绿色、可再生能源,在能源紧张、环境问题日益突出的今天,越来越受到人们的重视。光伏发电是利用太阳能的主要途径之一,在光伏发电系统中,当电池板垂直于太阳光时发电效率最高,因此要提高光伏发电效率,就应使电池板随太阳而动且始终保持与太阳光的垂直[1-2],太阳自动跟踪控制系统即为此而设计。
常用的太阳能跟踪控制主要有3种方法:(1)基于地球匀速自转的匀速控制法;(2)利用光敏电阻的光强控制法;(3)基于当前时间及地点经纬度的视日运动轨迹跟踪。这3种控制方法都存在一些问题,不能实现太阳的高精度跟踪。文中利用四象限探测器对光强控制法进行改进,同时结合视日运动轨迹跟踪设计了一种高精度太阳自动跟踪控制器。
1 系统总体方案设计
太阳跟踪控制器主要由单片机C8051F061、四象限探测器、信号调理电路、GPS模块、风速传感器、步进电机驱动及隔离、CAN总线接口电路等构成。系统框图如图1所示。
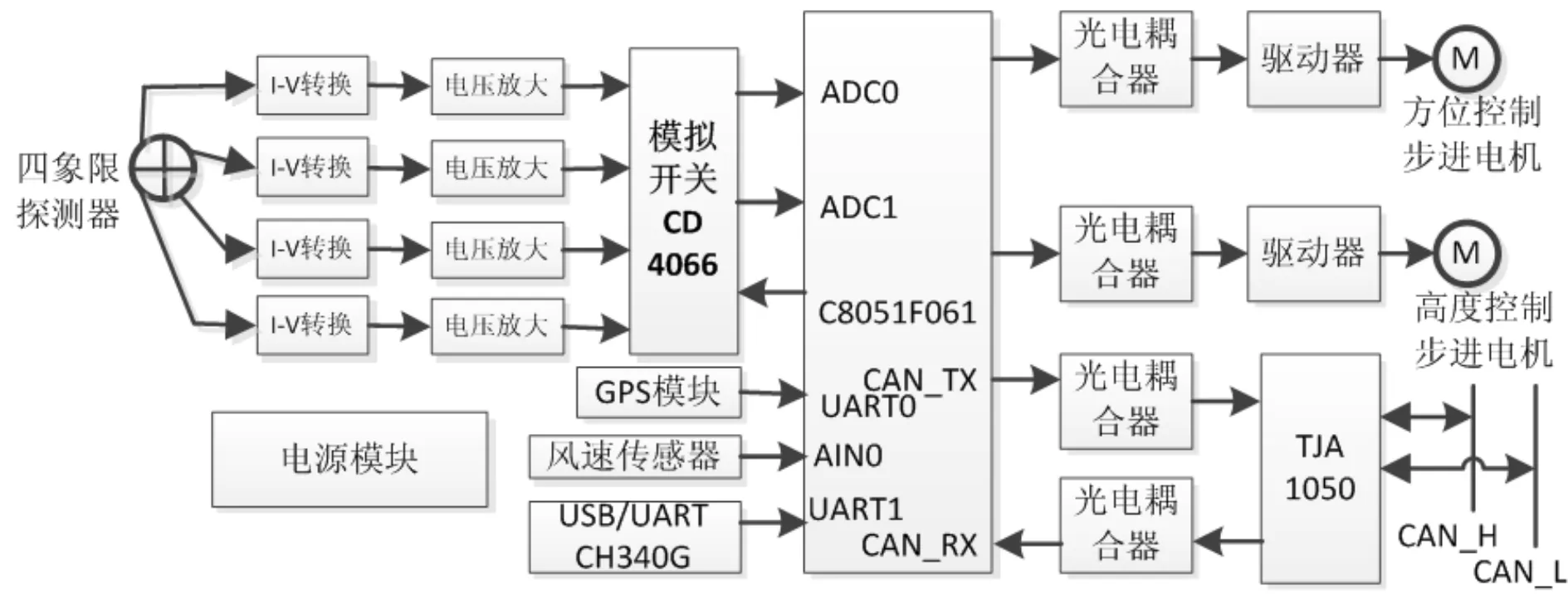
图1 太阳跟踪控制器系统框图
GPS模块提供时间及经纬度数据,计算出太阳的方位角和高度角,四象限探测器的四路输出信号经I/V转换、电压放大后,经模拟开关选择送入C8051F061的两路16位高速ADC中进行A/D转换,根据得到的转换结果计算出当前太阳跟踪偏差,经隔离后驱动两个步进电机调整电池板的方位角和高度角,使电池板垂直于太阳光。风速传感器测量当前的风速,当风速过大时,控制电池板旋转至利于抗风的角度。为方便构成现场总线控制系统,控制器设计有CAN总线接口,通过CAN总线向其他节点提供当前时间、风速、太阳方位角、高度角等信息,在其他节点配合下实现太阳能电池阵列的控制。
2 硬件电路设计
2.1 四象限光强探测及信号调理电路
2.1.1 四象限光强探测定位原理
四象限探测器是一种光电探测器,其感光面分割为4个相同的部分,对应于直角坐标系的四象限,光束照在感光面上形成圆形的光斑,探测器的4个部分分别产生电流,电流大小与光斑面积成正比,因此可根据电流大小计算出光斑中心的坐标(x,y)。将4个象限的光斑面积分别记为Sa,Sb,Sc和Sd,各象限的光电流转换成电压后分别为Va,Vb,Vc和Vd,当圆形光斑中心与探测器重合时,如图2(a)所示,光斑中心坐标为(0,0),否则,如图2(b)所示,可根据式(1)~式(2)计算出光斑的中心坐标,其中k为待标定的常数[3-4]。
(1)
(2)
设计中采用的光强跟踪四象限光阑筒如图2(c)所示。四象限探测器QP50-6安装在光阑筒底部的中心,顶部小孔的中心与QP50-6的中心共轴,太阳光经过顶部小孔经消杂光光阑后在四象限探测器光敏面上形成圆形光斑。由于光斑直径与四象限探测器半径相等时,探测灵敏度最高,根据太阳张角(0.533°)选择光阑筒高度h为200 mm,顶部小孔直径为3 mm,此时太阳光斑的直径约等于Q50-6光敏面半径,可实现最高精度跟踪[5-6]。

图2 四象限光强探测原理
太阳方位角β、入射角θ分别为[7]
(3)
(4)
根据式(3)~式(4)求得太阳方位角和入射角后,根据所用步进电机及其驱动细分情况,计算出两个步进电机相应的步数,控制电机调整电池板角度,使之与太阳光垂直。
2.1.2 信号调理电路
信号调理电路如图3所示,图中OPA129是一种高输入阻抗、超低偏置电流、低漂移的精密运算放大器,适合处理光电传感器输出的光电流信号;传感器a象限输出的光电流经OPA129处理后得到电压信号,在精密运算放大器OP37放大后经模拟开关CD4066送C8051F061进行A/D转换。

图3 信号调理电路(a象限)
2.2 CAN总线接口电路
CAN总线接口电路如图4所示。采用TJA1050作为CAN总线驱动器,C8051F061的CAN控制器收/发信号经高速光耦6N137隔离后与TJA1050相连。光电耦合器的使用,实现了总线上各节点的电气隔离,增强了系统抗干扰能力。
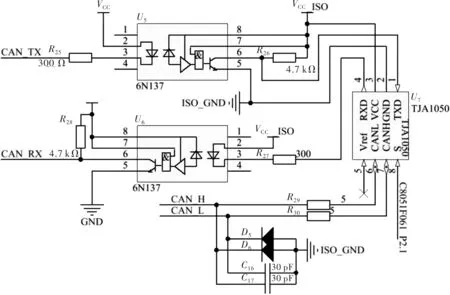
图4 CAN总线接口电路
2.3 风速监测电路及GPS模块接口
考虑到强风可能会造成太阳能电池板的损坏,系统中采用5 V供电的电压输出型(0~5 V)YGC-FS风速传感器设计了风速监测电路,当风速超过设定值时,控制电池板旋转到风压较小的角度。
GPS模块与C8051F061的UART接口相连,获取当前地点的经、纬度及时间、日期信息。根据这些信息利用公式求得当地、当时的太阳高度角α及方位角γ[8]
sinα=sinδ·sinφ+cosδ·cosφ·cosω
(5)
δ=23.45sin[360×(248+n)/365]
(6)
tanγ=sinω·cosδ/cosα
(7)
根据式(5)计算太阳高度角,根据式(7)计算太阳方位角。其中,φ为当地地理纬度;ω为太阳时角,其数值等于离正午的时间乘以15°,其中上午为负,下午为正;δ是太阳赤纬角,由Cooper方程,即式(6),近似求得。式(6)中n是一年中日期序号,元旦时n=1。
3 软件设计
单片机程序主要任务为:与GPS模块通信、四象限传感器的数据采集、CAN总线通信、对步进电机进行决策及控制。
主程序流程图如图5所示。系统上电初始化之后,读取GPS信息,若GPS数据有效提取经纬度、时间、日期信息,若当前处于系统工作时间,则每6 min采集一次四象限光电传感器数据,太阳刚升起时照度低,自动进入视日运动轨迹跟踪模式,亮度足够高后自动进入精度更高的四象限光强定位跟踪模式;非工作时间自动回到初始位置。

图5 主程序流程图
4 实验测试
2016年1月10日在盐城(东经120.21°,北纬33.38°)对所设计的太阳跟踪系统进行测试,测试数据通过C8051F061的UART1上传到PC机中,PC机上自编的LabVIEW程序接收数据并存储为Excel表格形式。其中,太阳高度角以当前地点地平线为0°,头顶为90°;太阳方位角以当前地点正午为0°,上午为负,下午为正。测试时间8:00~16:00,每6分钟输出一组数据,总共获得80组数据。太阳高度角和方位角的跟踪结果与各自的理论值比较分别如图6和图7所示。从实验数据可知系统跟踪误差<±0.5°,光照度越大跟踪误差越小。
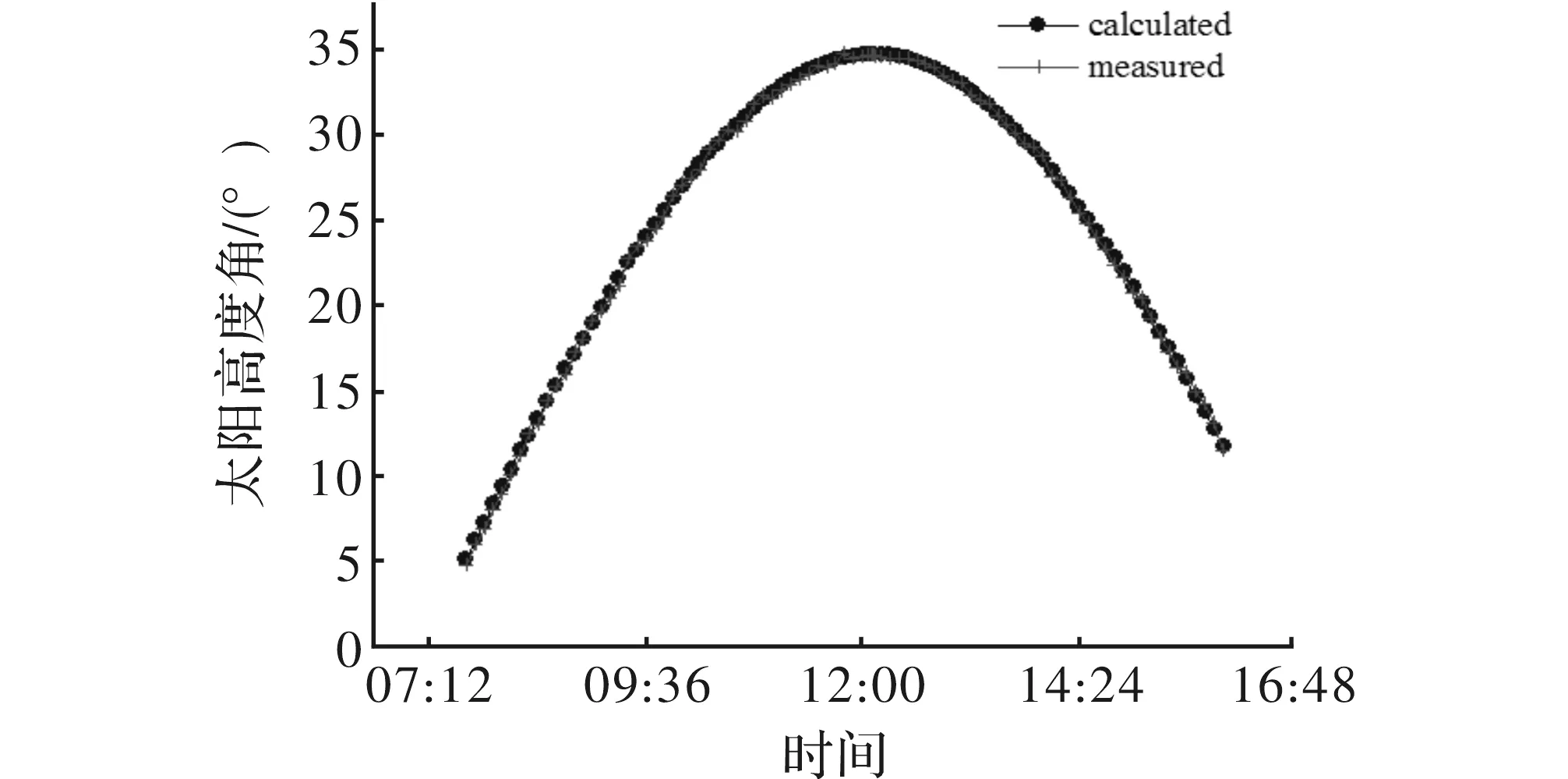
图6 太阳高度角跟踪测试结果
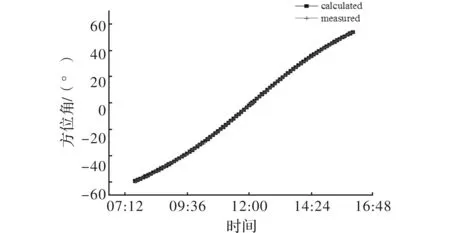
图7 太阳方位角跟踪测试结果
5 结束语
介绍了一种两个自由度的高精度太阳跟踪系统,该系统将视日运动轨迹的粗略跟踪和基于四象限光电探测的精密跟踪结合起来,相对于传统的单一太阳跟踪控制,大幅提高了跟踪精度。
[1] Lee D Y,Noh H J,Hyunds D S. An improved MPPT converter using current compensation method for small scaled PV2 applications[C].Berlin:Applied Power Electronics Conferenceand Expositi,2003.
[2] 杨培环.高精度太阳跟踪传感器与控制器的研究[D].武汉:武汉理工大学,2010.
[3] 司栋森,李增智,王晓旭.采用四象限探测器的智能跟踪定位算法[J].西安交通大学学报,2012,46(4):13-17.
[4] 高紫俊,董丽丽,孟丽艳,等.四象限探测器高精度定位算法研究[J].光电子·激光,2013,24(12):2314-2321.
[5] 刘恩超,吴浩宇,邹鹏.基于四象限探测器进行太阳跟踪的偏差分析[J].大气与环境光学学报,2012(2):139-146.
[6] 周子云,高云国,邵帅,等.采用四象限探测器的光斑中心定位算法[J].计算机测量与控制,2014,22(7):2154-2156.
[7] 王俊,王昊,应鹏,等.四象限差动式模拟太阳敏感器设计[J].传感技术学报,2012,25(12):1660-1668.
[8] 王成,钟登翔,高峻晓.两自由度太阳能跟踪系统设计[J].机床与液压,2012,40(13):124-128.
Design of Solar Tracking Controller Based on C8051F061
SHA Chunfang
(School of New Energy and Electronic Engineering, Yancheng Teachers University,Yancheng 224002,China)
The paper presents a dual-mode solar tracking controller based on C8051f061 for better accuracy. The system combines the visual solar movement trajectory with the high accuracy tracking of four quadrant photoelectric detector. After the solar azimuth and altitude angle are calculated, the cell panel is adjusted vertical to the sunlight by driving the step motors that controls the azimuth and altitude to achieve high tracking precision, thus a higher utilization of solar energy. The experiment results show that the solar tracking controller can achieve high tracking accuracy.
solar tracking; four quadrant photoelectric detector; C8051F061;CAN bus
2016- 01- 24
沙春芳(1973-),女,硕士,讲师。研究方向:光电技术应用。
10.16180/j.cnki.issn1007-7820.2016.11.004
TN209;TP
A
