电动助力转向系统主动回正控制方法的研究
2016-12-17德州学院汽车工程学院朱恒伟
德州学院汽车工程学院 朱恒伟
电动助力转向系统主动回正控制方法的研究
德州学院汽车工程学院朱恒伟
本文对电动助力转向系统的控制策略进行研究,针对主动回正控制提出了一种基于方向盘转角的闭环PID控制策略。并利用MATLAB/Simulink软件建立了电动助力转向系统动力学模型和整车模型,着重对系统回正控制模型进行搭建,通过对不同输入力矩运行EPS系统的回正控制仿真,验证加入回正控制后的汽车回正控制效果。
主动回正;PID;MATLAB/Simulink;仿真分析
电动助力转向系统是近些年在国内迅速发展并大量应用的助力转向系统,国内很多企业和高校都对EPS系统的控制策略进行了相关的论证和研究。但是国内的EPS厂家对拥有主动回正控制功能的汽车投入还不多。当今社会汽车电子控制技术在汽车转向控制方面的应用越来越多,主动回正控制这一对汽车操纵稳定性和安全性带来极大优势的技术也成了我们需要关注的重点。
1 EPS系统动力学模型
EPS系统的轮胎回正力矩需要转向器齿轮的动力传递,要对整个EPS系统建立基于整车三自由度的系统动力学模型,分别对转向轴、齿轮齿条、助力电机和轮胎模型进行分析,现建立系统模型如下:

式中,Js为方向盘转动惯量;Bs为转向上轴阻尼;θs为方向盘转角;θe为转向下轴转角;Th为方向盘转矩;Ks为扭杆刚度;θm为电动机转角;Jm为电机转动惯量;Km为电动机刚度;G为减速器传动比;Xr为齿条位移;MR为转向器质量;BR为齿条阻尼;Xr为齿条位移;TR为齿条克服轮胎转动的阻力;rp为齿轮基圆半径。
2 回正控制
2.1基于转角闭环的回正控制
通过对EPS系统控制策略进行研究,助力控制始终贯穿于汽车转向的整个过程,只有当汽车方向盘转角绝对值呈递减状态时,系统才处于主动回正控制状态,否则,主动回正将不起作用[1]。
综上所述,现提出一种基于方向盘转角传感器测得的方向盘转角的PID闭环控制,如图1所示。
反馈到电动机提供的回正力矩为:

式中,TRD为电机主动回正力矩;为方向盘转角;KP、KI、KD分别为比例系数、积分系数、微分系数[2]。

图1基于方向盘转角闭环PID控制的主动回正控制框图
汽车在运行过程中可以根据车速的不同选取不同的系数,从而达到不同的控制效果。例如,可令KD为0,这样可以得到大的电动机回正力矩,适合于汽车在中低速时的转向回正。如果令KI为0,这样可以得到大的电动机阻尼力矩,适合于汽车在高速行驶时的转向回正。其公式如下:

3 EPS系统回正控制模型的建立
3.1主动回正控制模型

图2 主动回正控制模型
由图2所示,输入信号为方向盘转角,输出信号为电动机的电压信号。
3.2EPS系统回正控制模型
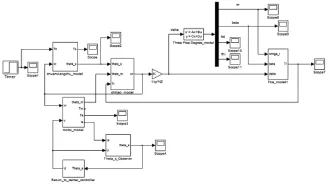
图3 EPS系统回正控制模型
如图3所示,整车三自由度模型简化为状态方程的形式,结合电动助力转向系统动力学模型和回正控制模型,可得出不同车速、不同转矩情况下的方向盘转角、横摆角速度、齿条位移等参数的回正控制效果。
4 EPS系统回正控制仿真分析
为验证回正控制效果,现通过回正控制模型对其进行仿真实验,根据GB/T6223.2-1994的回正实验,取一阶阶跃力矩作为方向盘转矩,首先保持70km/h的汽车行驶速度,驾驶员转动方向盘直到汽车的侧向加速度达到2m/s2,保持4s后迅速撒手,观察记录横摆角速度和齿条位移的响应情况。

图4 Th=5N·m时的齿条位移Xr响应

图5 Th=10N·m时的齿条位移Xr响应
图4和图5分别为输入转矩Th为5N·m和10N·m时齿条位移Xr的响应效果。从图中可以看出,没有加入回正控制的齿条位移需很长时间才达到稳定状态,稳态响应时间接近1s,且出现过多回正现象,齿条位移出现负向偏移引起方向盘发抖,且随着输入转矩的增加,偏离和方向盘抖动现象愈加明显。虚线部分表示在加入主动回正控制以后,齿条位移能够很快回到中间位置,且稳态响应时间可缩短到0.4s,回正效果良好。
图6和图7表示的是分别为输入转矩Th为5N·m和10N·m时横摆角速度ω的响应情况。从图中可以看出,没有加入回正控制的横摆角速度需很长时间才能达到稳定状态,稳态响应时间接近1s,且出现过多回正现象,齿条位移出现负向偏移引起方向盘发抖。
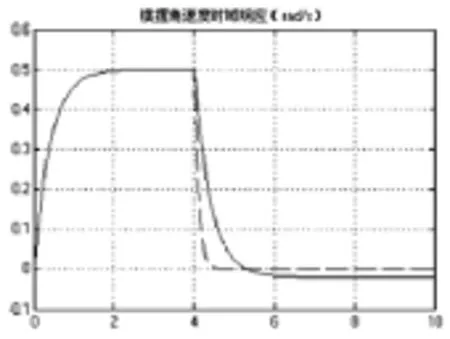
图6 Th=5N·m时的横摆角速度响应

图7 Th=10N·m时的横摆角速度响应
虚线部分表示在加入主动回正控制以后,横摆角速度能够很快回到0位,且稳态响应时间可缩短到0.4s,回正效果良好,很好地解决了负向偏移和方向盘抖动现象。
5 结论
本文通过对EPS的主动回正控制方法进行了探讨,提出了一种适合电动助力转向系统的主动回正控制方法。通过建立电动助力转向系统动力学模型和回正控制模型,得出了汽车在不同输入力矩下回正控制效果。通过仿真实验可以看到采用主动回正控制后,方向盘和车轮响应较为迅速且精准,进一步优化了汽车的回正特性和操纵稳定性。
[1]谢刚,孟广耀.基于状态反馈的电动助力转向系统主动回正控制研究[J].机械,2010,37(4):16-20
[2]申永,赵国勇,安红静.数控机床位置控制中非线性PID控制器的设计[J].机械工程与自动化,2012.8.
[3]黄正丹.电动助力转向系统回正及阻尼控制策略研究与实现[D].重庆:重庆大学,2011.
[4]毕大宁.汽车电动转向的基本概念[J].汽车零部件,2012.