智能灭火防爆机器人控制技术的研究
2016-12-16西安思源学院屈晓昱
西安思源学院 杨 燕 晏 成 屈晓昱
智能灭火防爆机器人控制技术的研究
西安思源学院 杨 燕 晏 成 屈晓昱
随着机器人在各领域的发展,灭火防爆机器人在消防领域应用优势也逐渐显现。本文对灭火防爆机器人的工作原理进行了研究,提出了使用热成像仪精确定位对火源点。并采用步进电机、齿轮传动、履带等实现机器人的避障和越障功能。提出了对燃烧物取样和分析的解决方案。
机器人;灭火;防爆
二十一世纪以来,随着智能化在国民经济各领域的发展,智能机器人的发展也随之取得了长足的进步。其发展趋势主要显现在两个方面,一方面机器人在制造业应用的范围越来越广阔,其标准化、模块化、网络化和智能化的程度越来越高,功能也越来越强,并向着技术和装备成套化的方向发展;另一方面,机器人向着非制造业应用以及微小型方向发展,如表演型机器人,服务型机器人,机器人玩具等。国内外研究机构正试图将机器人应用于人类活动的各个领域。
在我国机器人主要应用于工业制造领域,我国工业机器人现在的总装机量约为12万台,其中国产机器人占有量约为 1/3,即4万多台。与世界机器人总装机台数7500万台相比,中国总装机量仅占万分之十六。对中国这样一个拥有13亿人口的大国来说,仅在机器人数量上就和发达国家有着很明显的差距。因此大力发展我国的机器人事业刻不容缓。
灭火防爆机器人作为特种机器人的一种,随着社会经济的迅猛发展而出现的。目前主要用于化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故现场。这些现场一旦发生灾害事故,消防员面对高温、黑暗、有毒和浓烟等危害环境时,若没有相应的设备贸然冲进现场,不仅不能完成任务,还会徒增人员伤亡。灭火防爆机器人能代替消防救援人员进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场进行数据采集、处理、反馈。灭火防爆机器人的出现无疑可以辅助消防员及时获得现场信息,甚至实现自动灭火。其在灭火和抢险救援中发挥了举足轻重的作用。
一、灭火防爆机器人的总体设计方案
灭火防爆机器人由七大部分构成,包括热成像仪、红外摄像仪、3D激光扫描仪、燃烧物分析仪、传动机构、主控机构和GPS定位系统。实物见图1。

图1 灭火防爆机器人
灭火防爆机器人,采用多参数分析系统。利用热成像仪对火灾现场进行分析,确定火源位置,发送指令控制给灭火机器人,机器人选择相应的灭火工具进行灭火。红外摄像仪还可以实时传输现场图像,3D空间扫描仪能够及时查看火灾现场的空间地形情况。由于火灾现场情况复杂,机器人还配备了气体、固体、液体的取样设备,可以及时进行燃烧物的取样和分析。该系统可以实时反馈现场的数据,对现场的数据进行采集、处理和响应,现场指挥人员可以根据其反馈结果,及时对火灾作出科学判断,并对火灾事故现场工作做出正确、合理的决策。机器人配备了液体灭火装置,可以进行高压和水雾的多种灭火方式。
二、机器人各部分功能介绍
红外热成像仪是一门使用光电设备来检测和测量辐射并在辐射与表面温度之间建立相互联系的科学。辐射是指辐射能(电磁波)在没有直接传导媒体的情况下移动时发生的热量移动。通过热成像图分析,可以判断出物体的物体等情况,从而确定出,火灾现场的火势情况,确定出火源位置,灭火机器人对指定方位进行灭火。
红外摄像仪实时传输现场图像,3D激光扫描仪采用三维数据,提供火灾现场的地形,使得消防员更好的了解现场情况。
热成像仪,红外摄像仪,3D激光扫描仪的结合更好的成为机器人的眼睛,取得火灾现场的实时情况。设备将安装在电动云台上,远程可以控制其转动以及移动的方向。
燃烧物分析仪可以对气态、液态和固态燃烧物进行分析,在复杂的火灾现场,确定燃烧物类型,以及了解燃烧物情况,才能更好的采取灭火措施,并有针对性的选择灭火材料和灭火方式。灭火方式有高压和水雾等多种选择方式。
传动机构采用步进电机、齿轮传动、履带、液压等实现机器人的工作。机器人具有蔽障和越障功能。配有机械臂实现简单清理障碍。运动方式使用履带,具备良好的通过性。运动方式使用履带可以实现上楼梯,越障等功能,更好的适应在复杂情况下的使用。
主控机构采用人机合作实现半智能(自主运行)/操控(远程图传遥控)的功能。
机器人的信息传输使用2.4G、GPS定位。现场进行数据采集、处理、反馈,有效地解决消防人员在上述场所面临的人身安全、数据信息采集不足等问题。现场指挥人员可以根据其反馈结果,及时对灾情作出科学判断,并对灾害事故现场工作作出正确、合理的决策。
三、硬件设计方案
系统采用STC89C52单片机作为核心控制单元用于系统的控制,小车车头装有2个红外光电传感器用来避障。热成像仪将火源转化成电信号,用于寻找火源。系统总体的设计方框图如图2所示。
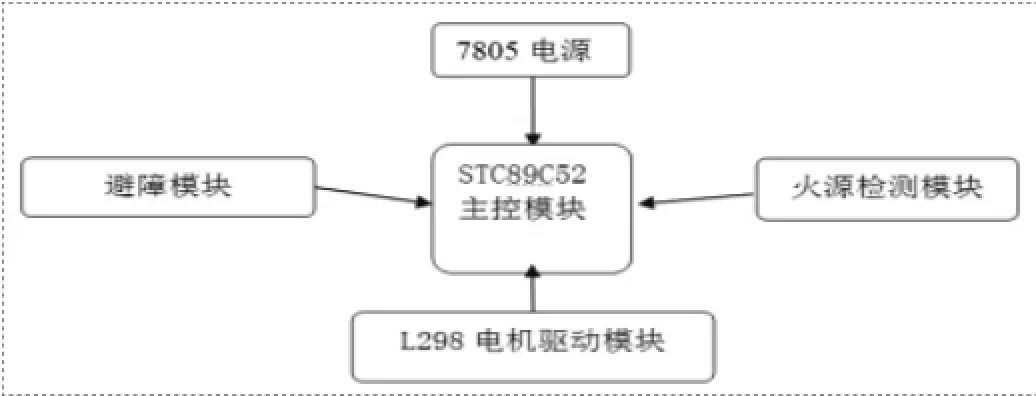
图2 系统硬件设计方框图
系统硬件原理图如图3所示,分为电源模块、单片机CPU、灭火模块、电机驱动模块、显示模块、避障模块和接口电路等。
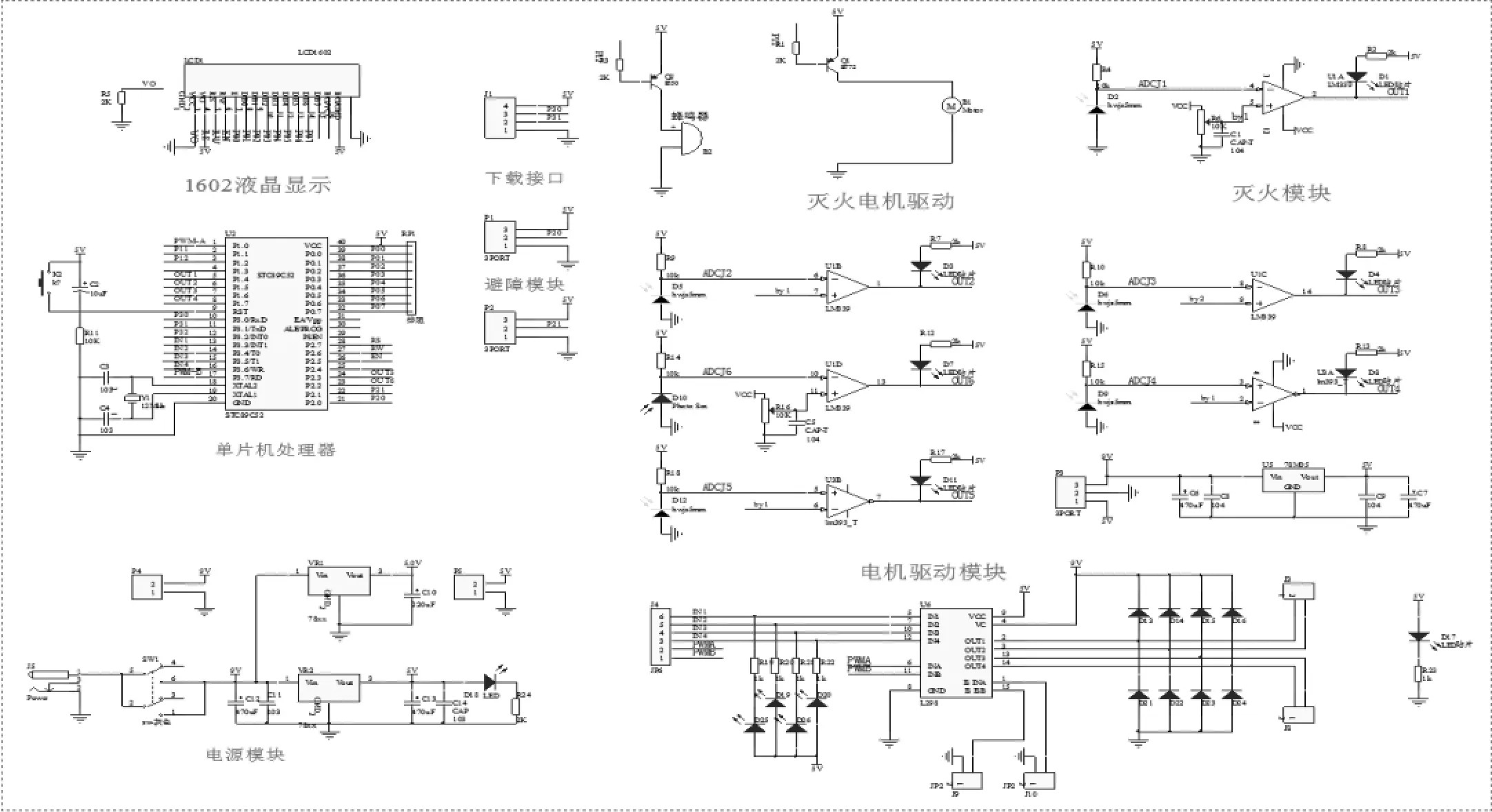
图3 系统硬件设计原理图
四、结论
通过对灭火、防爆机器人的研究,可以使机器人到达一些人类不宜到达的场合,来进行火灾燃烧物的分析,和精确定位火源。机器人的避障,清障功能能更有力的解决目前消防中的难题。
[1]康华光.电子技术基础—模拟部分(第五版)[M].北京:高等教育出版社,2006.
[2] 谭浩强.C程序设计[M].北京:清华大学出版社,1991.
[3]韩毅,杨天.基于HCS12单片机的智能寻迹模型车的设计与实现[J].学术期刊,2008,29(18):1535-1955.
[4]王晓明.电动机的单片机控制[J].学术期刊,2002,13(15):1322-1755.
2015年国家级大学生创新创业训练项目编号:201513121814。
杨燕(1971-),女,陕西人,硕士,高级工程师,西安思源学院工学院教学副院长。
