基于改进型非奇异终端滑模观测器的永磁同步电动机矢量控制系统研究
2016-12-16王亚
王亚
(江苏省徐州经贸高等职业学校,江苏 徐州 221004)
基于改进型非奇异终端滑模观测器的永磁同步电动机矢量控制系统研究
王亚
(江苏省徐州经贸高等职业学校,江苏 徐州 221004)
针对传统滑模观测器的永磁同步电动机控制系统存在的抖振问题,在了解现有解决方案的基础上,应用两种典型方法对传统滑模观测器进行了改进,并对于永磁同步电动机的启动,给出了一种由开环启动到闭环运行平滑切换的自启动方案,最终通过仿真与实验验证了其有效性。
永磁同步电动机;矢量控制;非奇异终端滑模;启动策略
1 引言
永磁同步电动机功率密度高,调速范围宽,响应速度快,在数控机床、电动汽车、工业机器人等领域得到了广泛应用,研究高效且可靠的永磁同步电动机调速方案具有重要意义。无速度传感器矢量控制技术成本低、可靠性高,是永磁同步电动机控制领域的研究热点。
早在1989年,MIT的L. A. Jones就对永磁同步电动机的无传感器控制进行了研究[1]。经过二十多年的发展,国内外学者现已提出多大十余种有效的无传感器技术。
根据无传感器方法所适用的速度区段,可大致分为两类:中、高速适用方法与低速(零速)适用方法。
中、高速适用方法是由电机的反电动势来获取转子位置信息。主要有以下方法:(1)开环算法[2];(2)状态观测器法[3];(3)模型参考自适应法[4];(4)虚拟坐标系法[5];(5)扩展卡尔曼滤波器法[6]。由于永磁同步电动机在低速运行或静止时,反电势值很小甚至为零,无法根据反电势有效地计算出转子位置和转速。
低速适用方法基于电机的凸极效应与定子铁芯的非线性饱和特性。主要有以下方法:(1)预定位法[7];(2)测试矢量励磁法[8];(3)测试脉冲励磁查表法[9];(4)脉振高频电压(电流)矢量注入法[10-12]。但在高速区段特别是弱磁调速时,此类方法限于电压将无法稳定工作。
鉴于上述方法所适用调速范围的限制,一些学者把高低速方法结合起来并实现两者平滑切换,从而使无传感器方法能在全速范围内对转子转角和转速实现准确估计。
本文以内嵌式永磁同步电动机为研究对象,基于MATLAB/Simulink软件平台对基于滑模观测器的无传感器技术做了较深入分析和研究,并利用实验室硬件平台对基于滑模观测器的永磁同步电动机矢量控制系统进行了实现。本文结论对永磁同步电动机无传感器矢量控制系统的设计与应用具有一定的参考意义。
2 永磁同步电动机的矢量控制

图1 永磁同步电动机矢量控制系统框图Fig.1 The chart of vector control of Permanent magnet synchronous motor
为实现永磁同步电动机矢量控制系统,常采用速度和电流双闭环的PI控制方案。首先测出电机转子位置和转速,将实际转速与给定速度作比较,得到速度误差并经速度PI控制器(ASR)得到电流给定值;然后根据电流控制策略,得到直轴和交轴(d、q轴)电流分量给定值;采样得到各相电流值,依次经Clarke和Park变换得到电流实测值的d、q轴分量,其中Park变换需要用到测得的转子位置信息,将电流实测值的d、q轴分量分别与对应给定值作比较,得到电流误差并经电流PI控制器(ACR)得到d、q轴电压给定;d、q轴电压给定经反Park变换得到静止坐标系下的α、β轴分量;然后经SVPWM调制得到各逆变器开关控制信号,从而实现对永磁同步电动机的控制。本文采用id=0的电流控制策略。永磁同步电动机矢量控制系统框图如图1所示。
2 基于PMSM扩展反电势模型的传统滑模观测器
2.1 IPMSM的扩展反电势模型
由IPMSM的数学模型可以得到

定义λ为扩展反电势(EEMF),并令

则若能实时地对EEMF进行准确估算,就可以对转子位置实现实时观测。
2.2 基于EEMF模型的传统滑模观测器
由于式(1)中含有电流的微分,为便于应用EEMF模型设计滑模观测器,将其改写为电流的状态方程形式

由式(3)可构造滑模观测器

h为滑模增益。但由于该控制律为开关控制,使K中含有部分高频分量,将其经低通滤波(LPF)可得到等价控制量


图2 PLL位置观测器原理框图Fig.2 The diagram of PLL position observer
这样,就得到了基于EEMF的传统滑模观测器,如图3所示。

图3 基于EEMF的传统滑模观测器Fig.3 The Sliding mode observer based on EEMF
3 滑模观测器的改进与无传感器PMSM的启动
3.1 滑模观测器抖振的改进
3.1.1 滑模观测器去抖振方法概述
分析传统滑模观测器的变结构控制原理,可以发现传统滑模观测器的变结构只是在两种控制结构间来回切换,这种切换特性导致了滑模观测器抖振的出现。在实际工程应用中,抖振可能会诱发系统的高频未建模动力学特性,导致系统器件的损坏。为减弱甚至消除抖振,国内外学者提出了多种方法,主要有:(1)边界层法;(2)光滑函数法;(3)趋近律改进法;(4)高阶滑模控制法;(5)基于现代控制理论的混合控制法[13-14]。
3.1.1 饱和改进型滑模观测器

图4 饱和改进型滑模观测器Fig.4 Saturate the sliding mode
饱和改进型滑模观测器属于边界层法,原理框图如图4所示。搭建基于饱和改进型滑模观测器的永磁同步电动机矢量控制系统模型,其转速、转角观测结果如图5所示

图5 饱和改进型滑模观测器的转速、转角观测结果Fig.5 The rotate speed and corner observe error
3.1.2 非奇异终端滑模观测器
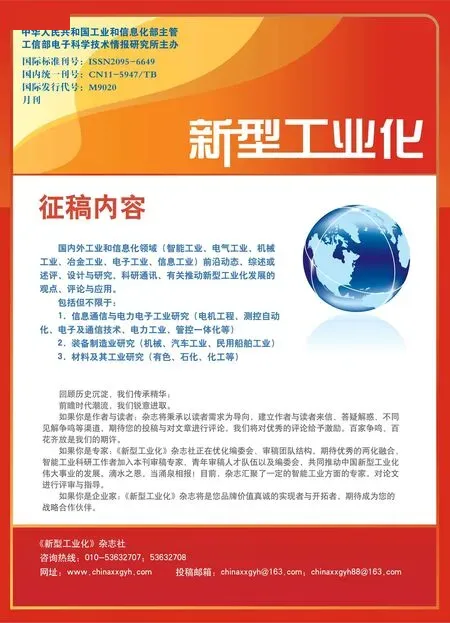
非奇异终端滑模观测器(NTSMO)基于高阶滑模控制来削弱抖振,其原理框图如图6所示。
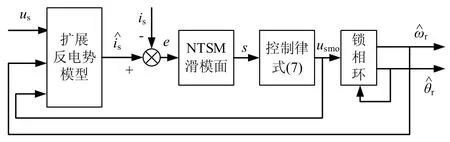
图6 非奇异终端滑模观测器Fig.6 Non-singular terminal sliding mode
NTSM滑模面S取为


l、ηηη、η。g12为设计参数,且12一般均设计为常数,lg须满足式(8)。可由李雅普诺夫稳定性直接法证明:若取式(7)所示控制律并选用合适的参数,可使e、e˙在有限时间内收敛到零并使系统保持在二阶滑模面e= e˙=0上。

搭建基于非奇异终端滑模观测器的永磁同步电动机矢量控制系统模型,其转速、转角观测结果如图7所示。由图7可以看出,与饱和改进型SMO相比,NTSMO消抖效果更好,但启动时的转速跟踪响应及转角跟踪误差略大.
3.2 无传感器PMSM的自启动
PMSM平稳的自启动是其正常工作的必要保证。无传感器PMSM的自启动一般采用两种方法:一是转子初始位置定位方法,一是开环启动方法。这里给出一种基于预定位的开环启动方案并进行仿真验证。
开环启动可分为含预定位的速度开环运行和切换至由观测器估算的速度闭环运行两个阶段。其原理框图如图8所示,启动过程中两阶段的切换也就是图中开关由1端向2端切换的过程。开环运行状态下的转角给定可由转速给定积分得到,即
为保证启动不失步,该转角给定的初始值需满足一定条件,即转角给定初始位置要落后转子实际位置且在90°电角度内。
当转速达到一定值(如0.1nN)后便可进入第二阶段,即切换至由观测器估算的速度闭环运行状态。为了使切换平滑,需采取两项措施:

图7 非奇异终端滑模观测器的转速、转角观测结果Fig.7 The rotate speed and corner observe error of nonsingular terminal sliding mode
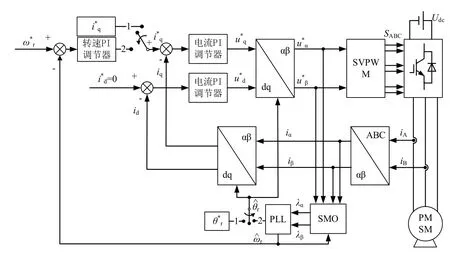
图8 PMSM开环启动原理框图Fig.8 The diagram of open loop start-up
(1)为了使转角切换平滑,须保证切换前后转角尽量相等,即要求切换时刻转角估算值与开环给定值足够接近。因此可设置切换条件为

δ>0,为切换临界角,一般可设为5°。
(2)在切换发生时,电流给定并不为零,但切换至转速闭环后,转速PI控制器输出值却为零,为了使电流给定切换平滑,需要根据切换时的电流给定值设置适当的PI控制器积分初值。
按图8搭建仿真模型,切换临界角δ=0.1rad。转速及转角仿真波形如图9所示。开闭环切换发生0.226s处,由图9中的局部放大图可以看出,转速和转角均无明显切换痕迹,启动效果良好。从而验证了所给出的开环启动策略的有效性。

图9 基于开环启动及传统SMO的PMSM转速和转角波形Fig.9 The rotate speed and corner of SMO
4 实验与结果分析
PMSM矢量控制系统的硬件部分主要包括主电路、控制电路、采样电路、驱动和保护电路。实验采用DSP(TMS320F28335)作为控制核心,以三相交流电为系统供电,经不控整流得到直流电源,以无源的直流电动机作为负载且直流动电机的输出侧接功率电阻,系统装有增量式光电编码器,以测得PMSM实际转角和转速来验证观测器的准确性。实验平台硬件主体电路如图10所示。

图10 实验平台Fig.10 Experimental platform
搭建实验平台,采用先开环后闭环的多级调试方案,对基于滑模观测器的PMSM无传感器矢量控制系统进行实验验证。结果如下:
当给定转速为400r/min时,实测转角与估算转角如图11所示。可以看出,估算转角对实际转角的跟踪精度较高,滞后很小,抖振也较小。
转速由200r/min斜坡升至400r/min的转速波形如图12所示。可以看到转速斜坡给定下,估算转速能实时跟踪实际转速,抖振较仿真结果小了很多,这与实验带负载使电机转动惯量加大及电机本身的滤波特性有关。
5 结论
基于PMSM扩展反电势模型的传统滑模观测器具有较强的鲁棒性,但存在抖振问题,饱和函数法和非奇异终端滑模法均可有效削弱抖振。本文给出了一种由开环启动到闭环运行平滑切换的自启动方案,仿真表明,采用该方案可实现转角和转速的平滑切换。

图11 实测转角(CH2)与估算转角(CH1)Fig.11 Actual corner and estimate corner
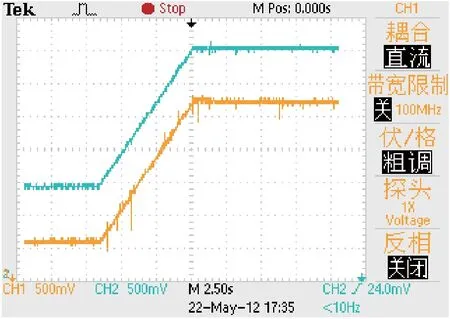
图12 实测转速(CH2)与估算转速(CH1)Fig.12 Actual rotate speed and estimate speed
[1] L. A. Jones,J. H. Lang. A State Observer for the Permanent-magnet Synchronous motor[J]. IEEE Transactions on Industrial Electronics,1989,36(3):374-382.
[2] D. Paulus,J. F. Stumper,R. Kennel. Sensorless Control of Synchronous Machines Basedon Direct Speed and Position Estimation in Polar Stator-Current Coordinates[J]. IEEE Transactions on Power Electronics,2013,28(5):2503-2513.
[3] 陈强,吴根忠,叶雷.永磁同步电机变负载自适应神经网络控制[J]. 新型工业化,2014,4(4):17-22,27.
Chen qiang,Wu genzhong,Ye lei. Adaptive Netural Control of Permanent Magnet Synchronous Motor e with Variable Load[J].The Journal of New Industrialization,2014,4(4):17-22,27.
[4] M. Rashed,A. F. Stronach. A stable back-EMF MRAS-based Sensorless Low speed Induction Motor Drive Insensitive to Stator Resistance Variation[J]. IEE Electric Power Applications,2004,151(6):685-693.
[5] N. Matsui,M. Shigyo. Brushless DC Motor Control without Position and Speed Sensors[J]. IEEE Transactions on Industry Application,1992,28(1):120-127.
[6] S. Bolognani,L. Tubiana,M. Zigliotto. Extended Kalman Filter Tuning in Sensorless PMSM Drives[J]. IEEE Transactions on Industry Applications,2003,39(6):1741-1747
[7] 秦峰,贺益康,刘毅,等. 两种高频信号注入法的无传感器运行研究[J]. 中国电机工程学报,2005,25(5):116-121.
Qin feng,He Yi-kang Liu Yi,et al. Compartive investigation of sensorless control with Two High-frequency signal injection schems[J]. Proceedings of the CSEE,2005,25(5):116-121.
[8] 王子辉. 永磁同步电机全速度范围无位置传感器控制策略研究[D]. 浙江大学,2012.
Wang zihui .Research on the Postion-Sensorless Conrol strategy of PMSM at Full Speed Range[D].ZHEJIANG university,2012.
[9] S. Nakashima,Y. Inagaki,I. Miki. Sensorless Initial Rotor Position Estimation of Surface Permanent-magnet Synchronous Motor[J]. IEEE Transaction on Industry Applications,2000,36(6):1598-1603.
[10] 张猛,肖曦,李永东. 基于扩展卡尔曼滤波器的永磁同步电机转速和磁链观测器[J]. 中国电机工程学报,2007,27(36):36-40.
Zhang Meng,Xiao Xi,Li Yong-dong. Speed and Flux Linkage Observer for Permaent Synchronous Moror Based on EKF[J]. Proceedings of the CSEE,2007,27(36):36-40.
[11] 陈强,陶亮,南余荣,等.基于扩张状态观测器的永磁同步电机滑模变结构位置伺服控制[J]. 新型工业化,2015,5(8):17-25.
Chen qiang,Tao Liang ,Nan Yu-rong,et al. Sliding-mode Variable Structure Position Servo Control of Permanent Magnet Synchronous Motor Based on Extended State Observer[J]. The Journal of New Industrialization,2015,5(8):17-25.
[12] J. K. Ha,K. Ide,T. Sawa. Sensorless Rotor Position Estimation of an Interior Permanent-Magnet Motor from Initial States[J]. IEEE Transactions on Industry Applications,2003,39(3):761-767.
[13] 黄雷,赵光宙,年珩. 基于扩展反电势估算的内插式永磁同步电动机无传感器控制[J].中国电机工程学报,2007,27(9):59-63.
HuangLei,Zhang guang-zhou,Nian Heng.Sensorless Control of Interior Permanent Mangnet Synchronous Motor by Estimation of an Extended Electromotive Force Proceedings of the CSEE ,2007,27(9):59-63.
[14] M. Skola,H. Tuusa.Sensorless Control of Salient Pole PMSM Using a Low-frequency Signal lnjection[J]. European Conference on Power Electronics and Applications,2005,1:10-14.
The Vector of Permanent Magnet Synchronous Motor based on Non-singular Terminal Sliding Mode
WANG Ya
(Advanced vocational school of Xuzhou economy and trading, Xuzhou 221000, China)
Since the conventional sliding mode observer seems not satisfactory, After referring to the existing solutions, the improvement of the conventional SMO is presented based on two typical methods, having obtained good results. For the startup problem, an open loop startup strategy with smooth transition is proposed, and the effectiveness of the scheme is verifi ed by simulation.
Permanent magnet synchronous motor(PMSM); Vector control(VC); Non-singular terminal sliding mode(NTSM); Start-up strategy
王亚,基于改进型非奇异终端滑模观测器的永磁同步电动机矢量控制系统研究[J]. 新型工业化,2016,6(10):70-77.
10.19335/j.cnki.2095-6649.2016.10.011
: WANG Ya. The Vector of Permanent Magnet Synchronous Motor based on Non-singular Terminal Sliding Mode[J]. The Journal of New Industrialization, 2016, 6(10): 70-77.
王亚(1979-),男,江苏铜山人,讲师,本科学历,主要从事单片机及电机控制等方面的教学与研究