温度保护程序的改进
2016-12-16万启飞
万启飞
成都建筑材料工业设计研究院有限公司,四川 成都 610051
温度保护程序的改进
万启飞
成都建筑材料工业设计研究院有限公司,四川 成都 610051
在水泥厂众多设备中,基本都会有温度参数,有些只有显示作用,而有些却十分重要,因为这些不同的温度值直接反映出设备运行状态的好坏,如果控制系统能够根据温度值的变化,对相应设备采取及时的保护措施,这将对避免设备损坏、水泥厂连续正常运行,起到积极有效的作用。根据一实际项目介绍两种改进的温度保护程序。
温度保护算法 选粉机轴承 温度曲线 温度联锁
0 引言
在建材行业中,许多工厂都会使用到比较多的大型设备,例如球磨机、立磨、辊压机、破碎机等,这些设备都由大功率电机驱动,并且一般都含有比较大型的轴,所以肯定有大型的轴承或者轴瓦。而现在绝大多数的控制系统对这些轴承或者轴瓦的保护都是通过对温度的监控而得以实现,当其到达一定值(报警值,例如80 ℃)的时候,会由控制系统输出声光报警,如果轴承或者轴瓦温度升高到另一值(停机值,例如90 ℃),比先前的报警值稍高的时候,控制系统会强制设备停止运行,并且联锁停掉其他相关的设备。但是在实际工程项目中,多次遇到温度升高跳停设备后,对应的轴承或者轴瓦还是已经损坏了。
所以这种简单的保护方法存在一定的缺陷,如果针对这些情况,增加一些温度保护措施,使得控制系统能更有效地保护设备,这将对提高水泥厂的生产效率起到更大的作用。
1 现场实际项目举例
在某个水泥熟料线保产项目的实际生产过程中,石灰石生料立磨选粉机轴承出现过一次温度升高到停机值(125 ℃),控制系统也及时跳停了选粉机,随后检修人员抽出选粉机轴后,却发现轴已经被啃伤(图1),轴承也完全损坏了。
出现这种事故后,一般要等设备厂家来修复,这会需要大量的时间。在此期间水泥厂会停止生产,造成重大损失。

图1 损坏的选粉机轴
在选粉机停机后不久,操作员就在中控DCS系统(本项目DCS系统使用的是Siemens的PCS7 CEMAT v8.0工业软件)中调出选粉机三个轴承温度的历史趋势图(图2)。

图2 选粉机轴承温度趋势图
其中红、黑、绿三条曲线分别对应选粉机的三个轴承温度,从图2中可以看出三个轴承温度在凌晨1:51分之前都比较稳定,温度分别稳定在75 ℃、80 ℃、100 ℃左右。到1:51分之后,红色曲线温度开始上升,1:54分左右,黑色温度曲线也开始上升,而绿色温度曲线基本稳定。
2 根据温度曲线分析得出的结论
(1)红色温度曲线所代表轴承率先升高到停机值125 ℃,造成选粉机跳停,然后温度迅速下降下来。
(2)黑色温度曲线所代表轴承在1:55分开始迅速升高,在选粉机跳停后,温度缓慢下降了1 min左右,然后又迅速上升至量程上限,可以判断出这个轴承在此时已经损坏,并和轴有剧烈摩擦,才会使温度在跳停后继续升高,在选粉机完全停止转动后,温度才开始缓慢下降。
(3)温度本来就是一个惯性量,具有滞后性,如果在温度升高到停机值时才采取保护动作,跳停选粉机已为时已晚,设备已经损伤。
(4)所以如果能够在温度到达停机值之前,提前一段时间采取保护动作,那就能避免类似的事故发生,保护设备,减少损失。改进相应的温度保护程序,就是解决这个问题的关键。
3 温度保护程序一
在设备正常运转情况下,温度稳定在正常阈值内的时候,温度的波动趋势是比较小而且较为缓慢的。首先针对红色曲线来分析,其温度是持续且较为快速的上升,转化为数学语言就是这段曲线的斜率K比较大,而且在这段时间内是一直大于个一个值k0的,即当t1<t<t2时,K≥k0 。所以我们可以根据这个数学特性来编一个算法,改进温度保护程序。从理论上讲,如果要得出这个曲线每一点的斜率,我们就必须知道这条曲线对时间t的数学表达式,然后对其求导数,就可以得到斜率对时间t的数学表达式,然而这样并不可行,并且我们也不需要得到每个时刻的斜率K,我们只需要求出每一秒的斜率即可。
下面介绍一下温度保护程序一的编程思路。
首先使用一个寄存器M来存储前一秒的温度值,然后用当前的温度值T减去前一秒的温度值M(T-M),除以1 s,即得到了这一秒的斜率K,再把当前温度T赋值给前一秒温度寄存器M,即M=T,再读取下一秒的温度值T。最后判断斜率K是否大于k0,如果大于k0(k0值的选定,需要现场实际测量出对应设备的温度曲线后,根据其正常运行时温度曲线的一般斜率来确定,一般每秒温升不会超过零点几度),则计数器C加1,否则计数器C清零。然后再跳到用当前温度值T减去前一秒的温度值M(T-M)这一步,如此一直循环运行,期间如果计数器C的值大于t0,则表明在连续的t0秒(例如t0=10 s)内,斜率K都是大于k0的,那么就要采取保护动作,联锁停机。所以对于类似红色温度曲线的情况,这种控制算法可以在温度开始快速连续升高的t0秒内做出动作,联锁停掉设备,避免对设备造成损坏。
图3就是以上编程思路对应的逻辑功能图。

图3 程序逻辑功能图一
4 温度保护程序二
黑色曲线是在一个短时间内,十分迅速地上升,可以近似为数学上的阶跃函数图象。而且仔细观察可以发现,这条曲线不是一直连续上升,在中间有一小段的局部下降,然后再继续迅速地上升。对于这种情况,就会产生局部最小点。如果用前面所提到的方法来做保护,我们会发现效果并不理想。因为曲线有局部最小点,这样会打断连续升温时间的累加,程序会在这个局部最小点之后又重新开始计算累加斜率大于K0的次数。所以如果温度不是连续的升高,程序就不能作出保护动作,这就不能保护设备。
所以针对这种情况,就要用另一种温度保护程序,其编程思路如下。
在一组按顺序每秒测量的温度值之内,当前时间测量的温度值与这组温度值中最小温度值之差,若大于一定值T0(T0值的选定,需要现场得到对应设备的温度曲线后,根据其正常运行时单位时间内的最大温差值来确定,不同的设备其值也不同),则联锁跳停设备。首先我们建立一个30个元素的数组A,利用堆栈的数据结构方法,把这个数组作为一个堆(先进先出),然后把每秒读取的温度值送入这个堆A中(用A[29]来存储当前的温度值,A[28]来存储前一秒的温度值,依此顺序类推,用A[0]来存储最近30秒前的温度值),这样我们就得到了一组30个按顺序每秒测量的温度值,当每秒读取一次当前温度值时,这个数组也就是堆A就更新一次。然后选取出这个组中的最小温度值Amin,选取最小值的算法有很多种,我们这里用的是两两比较,先令Amin=A[29],然后比较Amin和A[28],若Amin>A[28],则将A[28]赋值给Amin,即Amin=A[28],若Amin≤A[28],则保持Amin不变,依此类推,直到Amin和A[0]比较完成后,就可以得到这组温度值中的最小也就是最低温度值Amin。然后比较当前温度T和最低温度Amin的值(即T-Amin),如果其差值大于T0,则采取保护动作,联锁跳停设备。若否,就继续读取和比较温度。最后就这样往复循环执行程序。
图4就是温度保护程序二的逻辑功能图。
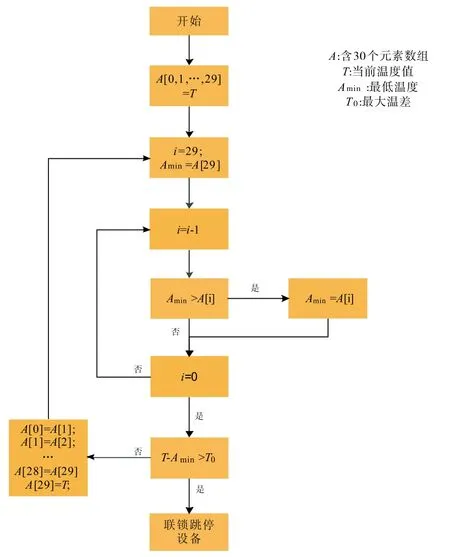
图4 程序逻辑功能图二
5 结束语
我们将这两种新的温度保护算法加入到球磨机轴瓦和选粉机轴承温度的保护程序中,运行一段时间后,球磨机因为第二种保护算法跳停了几次,而实际球磨机运行状态很好,并没有什么异常,用红外测温仪实测轴瓦温度并不高。查看历史数据后,发现轴瓦温度本来一直稳定在60 ℃左右,但突然在一瞬间就突变到量程上限150 ℃,然后又突然降回正常值,过段时间再次发生突变。根据现场经验分析,应该是热电阻断线造成温度突变到量程上限,实际发现是球磨机热电阻的接线虚接,只要球磨机震动一大,电缆接触不良,电阻值变成无限大,造成温度跳变。所以在这种情况下,温度保护程序二就会有误动作,误停设备。为了避免类似情况发生,我们必须把温度输入信号作滤波处理(例如平均值滤波),并且检查接线是否牢靠,尽量减小干扰和消除错误信号,这样才能保证程序正确运行,更好地保护设备。在加入这些保护程序后,根据现场反映的情况,还未出现过像上次严重的损坏轴承的事故。
文中介绍的两种温度保护程序,也有一定的局限性,只能针对设备在正常运行、温度比较稳定、不会有快速的大幅度波动的情况下才可以使用。所以读者可以参考这两种温度保护程序,根据自己的实际需要和理论知识作出相应的调整,以更好地保护设备。
2016-08-05)
TQ172.8;TB942
B
1008-0473(2016)06-0080-03
10.16008/j.cnki.1008-0473.2016.06.017