基于模糊神经网络的相控阵雷达任务调度设计
2016-12-16郑玉军田康生张金林刘俊凯
郑玉军, 田康生, 张金林, 刘俊凯
(空军预警学院, 湖北 武汉 430019)
基于模糊神经网络的相控阵雷达任务调度设计
郑玉军, 田康生, 张金林, 刘俊凯
(空军预警学院, 湖北 武汉 430019)
针对相控阵雷达任务调度中任务优先级较难建立数学模型,从而影响任务调度效率的问题,提出一种基于自适应模糊神经网络的相控阵雷达任务调度算法。该算法:模糊控制部分能够利用模糊隶属度对多个目标参数值进行量化处理;神经网络部分可以智能地实现目标参数和任务优先级之间非线性映射。仿真结果表明,该方法有效,在目标数目饱和情况下,保证高优先级任务被调度的同时,使更多的任务得到调度执行,其性能优于传统任务调度方法。
兵器科学与技术; 神经网络; 模糊理论; 相控阵雷达; 优先级; 任务调度
0 引言
高效合理的雷达任务调度算法可以有效分配雷达资源,充分发挥相控阵雷达性能。任务调度策略依据的是任务优先级,所以科学合理地分配优先级是优化任务调度策略的关键。
卢建斌等[1]综合考虑任务的工作方式优先级和截止期两个参数,提出了相控阵雷达实时任务调度算法;周颖等[2]提出了一种基于遗传算法的任务调度算法;赵宇等[3]提出了基于二次规划的相控阵雷达任务自适应调度算法;Jang等[4]提出了基于时间窗的相控阵雷达调度算法。上述研究是根据任务截止期等参数建立的数学模型在时间约束下求最优解,适合目标数目较少的情况,保证了高优先级任务调度成功率,降低了调度代价,但在目标数目饱和的条件下会删除部分重要任务(跟踪、验证),主要问题在于任务优先级分配策略不够精确。特别是对多功能相控阵雷达而言,不同的工作方式(搜索、跟踪)具有不同的优先级,但根据工作方式分配优先级缺乏实际考虑,即便是同一种工作方式下不同任务的重要程度也可能不同,例如同样是跟踪任务,目标的类型(弹道导弹、飞机)、速度、高度等参数不同,其威胁程度也不同,对其分配优先级还要考虑目标的参数。
传统的调度算法是根据目标参数来确定任务优先级[5],即用公式法估算参数权重求得优先级,但反映不了各参数与优先级之间的非线性关系。而神经网络具有无限逼近非线性函数的优势,不需要预先给定数学关系式,可以直接用实验数据中得到一个反映数据内在规律的模型,能够精确逼近输入与输出之间的映射。为此,本文设计了一种基于模糊神经网络(FNN)的相控阵雷达任务调度方法,解决了目标参数和优先级之间非线性关系难以映射的难题,可以精确的给任务分配优先级,并利用模糊理论对不同量纲的任务参数进行处理。最后的仿真结果表明,本文提出的调度方法能有效提高任务调度成功率,提升雷达性能。
1 任务调度数学模型
“宙斯盾”系统AN/SPY-1工程总设计师Baugh将相控阵雷达任务划分为8个优先级[6-7],如表1所示。任务工作方式是任务类型的表示,也是分配优先级的依据,本文考虑相控阵雷达在实际工作中出现的优先级分配不合理而影响雷达控制器调度性能的问题,在考虑工作方式的基础上,参考任务中的目标参数,来分配准确合理的任务优先级。

表1 任务优先级
本文约定数值越小,任务优先级越高。目前,最灵活最有效的调度方法是自适应算法,如图1所示。

图1 传统相控阵雷达自适应调度算法功能框架Fig.1 Functional framework of conventional phased array radar self-adaptive scheduling algorithm
优先级滤波器根据设备与环境条件,分配给任务请求优先级,经过串联形式的单个约束滤波器后把不符合约束条件的任务请求放入拒绝队列。优先级滤波器根据目标属性、目标类型和目标状态分配优先级,如(1)式所示:
p=pp+αm+βn+γk,
(1)
式中:p为任务优先级;pp为工作方式优先级;m、n、k分别为目标类型、目标状态、目标属性,α、β、γ分别为m、n和k的权重。公式法分配优先级优点是计算简单,但存在无法准确反映参数和优先级之间的非线性关系。理想的优先级滤波器应该精确映射任务参数和优先级之间的非线性关系,如图2所示。

图2 理想相控阵雷达自适应调度模型Fig.2 Ideal phased array radar self-adaptive scheduling model
2 基于FNN的相控阵雷达任务调度设计
2.1 任务调度模型
雷达控制器把下一个调度间隔SI内的所有任务T从待调度任务中取出,并送入优先级分配网络,然后该网络根据工作方式优先级pp、目标类型m、目标状态n、目标属性k等参数来确定其任务优先级p,并送入调度模块。经调度模块分析处理,把待调度任务分成3种类型,分别是可调度任务、延迟任务和删除任务。对于可调度任务,则执行调度优化;延迟任务则送入下一个调度间隔等待调度。
利用FNN构建任务优先级分配系统,分为模糊量化和神经网络两个部分,如图3所示。模糊量化部分通过任务参数的数据得到相应参数的隶属度,即神经网络的输入,并且经过模糊量化后,将各个参数归一化到[0,1]范围内。神经网络部分用于任务优先级分配,反向传播 (BP)神经网络和径向基函数(RBF)神经网络都是常用的用于决策系统的神经网络,但是由于RBF神经网络采用Gauss函数作为激励函数,属于局部逼近神经网络,其收敛速度比BP神经网络快[8]。因此,本文采用RBF神经网络建立任务优先级分配模型。

图3 基于FNN的自适应调度算法实现过程Fig.3 Implementation procedure of self-adaptive scheduling algorithm based on FNN
2.2 任务参数模糊量化处理
FNN的输入变量也就是优先级分配的依据信息:目标属性x1、目标距离x2、目标速度x3、目标高度x4和目标方位角x5. 根据目标情况,将参数划分为:x1={1,0},分别表示敌、我;x2={PB2,ZO2,NB2},分别表示目标距离雷达远、中、近;x3={PB3,PS3,ZO3,NS3,NB3},分别表示目标速度极快、快、中、慢、很慢;x4={PB4,ZO4,NB4},分别表示目标高度,以20 km和1 km为界限,高度大于20 km的目标为弹道导弹,高度小于1 km的为低空突防目标,都需要重点监视;x5={PB5,NB5},分别表示目标方位角,方位角越小,目标威胁越大。相控阵雷达搜索方位角为扇形120°,±30°方位角威胁比较大,±60°方位角威胁相对较小。
以目标速度为例,弹道导弹目标威胁最大,是重点监视目标,弹道导弹速度和射程成正比,洲际弹道导弹速度要大于远程弹道导弹,中程弹道导弹速度要大于近程弹道导弹,相应的速度越快威胁也越大;近几年发展的新型空天作战力量X-37B等临近空间飞行器的速度马赫数更是高达25,对我方威胁最大。此外,相控阵雷达也有监视战略轰炸机、隐身飞机的任务,隐身飞机的巡航速度马赫数可以达到3,战略轰炸机的速度马赫数也超过1;还面临无人机等慢速飞行器的威胁,其速度马赫数低于1. 对目标速度情况从马赫数为0.5~20进行划分,分别获得PB3、PS3、ZO3、NS3和NB3的隶属度如图4所示,其中PB3为戒下型分布,NB3为戒上型分布,PS3、ZO3和NS3为正态分布。

图4 目标速度隶属度Fig.4 Membership degree of target speed
同样的方法获得PB2、ZO2、NB2、PB4、ZO4、NB4、PB5和NB5的隶属度。模糊处理的过程带有操作人员的控制经验和专家知识,处理过的数据更能反映目标参数之间的关系以及目标参数和任务优先级之间的关系。输入数据经过模糊隶属度的计算,实现对任务优先级分配的各种决定因素的量化[8-9]。这样,根据目标属性x1、目标距离x2、目标速度x3、目标方位角x4和目标加速度x5获得任务优先级分配的模糊RBF神经网络的15个输入。输出层有一个节点,输出值为任务优先级。
2.3 FNN算法
RBF神经网络作为前向神经网络的一种主要形式,以其拓扑结构简单、学习快速,使其在自适应系统中应用广泛[10]。已经从理论上证明:只要网络隐含层节点数足够多,RBF神经网络可以以任意精度逼近任何非线性函数[11]。
RBF神经网络由3层组成,分别是输入层、输出层和隐含层。隐含层节点的作用函数对输入信号在局部产生响应,其中作用函数采用高斯函数:

(2)
式中:‖x-tj‖为欧氏范数,x是m维输入向量;tj为神经网络隐含层节点中心;σj为RBF方程,用来调节网络灵敏度;s为隐含层节点数。输入层实现x→Rj(x)的非线性映射,输出层实现Rj(x)→yk的线性映射,即

(3)
式中:l为输出层节点数;ωkj为权值。
RBF神经网络通过调整权值和阈值,使输出均方误差最小化,输出均方误差为
(t(x)-y(x))=eT(x)e(x),
(4)
式中:t(x)表示网络的期望输出;y(x)表示网络的实际输出。按(5)式和(6)式对参数进行每一步的调节:

i=1,…,s,j=1,…,m,
(5)

(6)
式中:ωi,j为权值;bi为阈值;α是学习速度。
3 仿真分析
以某型相控阵雷达为例,分别以目标数目较少和密集目标条件下评价算法性能。选取3种典型的工作模式:搜索、跟踪和验证,在调度间隔SI内以截止期错失率(MDR)为表征调度算法性能的指标。MDR是指未被调度成功的任务个数与参加调度的任务总数之比[9]。
对FNN的训练是任务调度模型进行学习的过程,因此,训练样本要体现调度规则。根据相控阵雷达设计要求和作战需要,给出了50个训练样本。用其中40个样本数据进行训练,用剩余10个样本进行测试。任务优先级分配结果如表2所示。
从表2从可以看出:第9个任务分配的优先级最高,主要考虑目标属性为敌方,根据目标速度判定
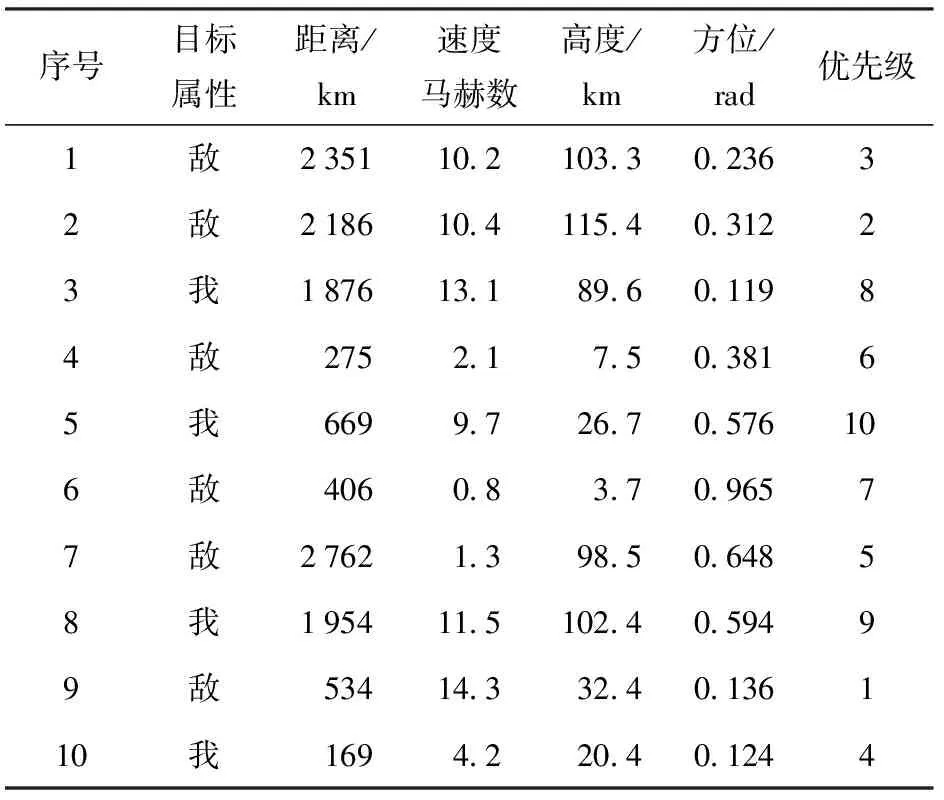
表2 任务调度结果
为弹道导弹目标,且距离534 km,高度为32.4 km,在大气层内,为敌方末段弹道导弹,优先拦截;其次为第1个和第2个任务,根据目标参数判定为敌方中段飞行的弹道导弹目标;优先级最低的是第8个和第5个任务,模型判定为我方处于中段和助推段飞行的弹道导弹目标,其优先级低于第4个和第6个任务,相应的任务为敌方高度突防的飞机和低速飞机,且低速飞机航向为非重点防御方向。
在目标数量饱和的情况下,用训练好的模型进行相控阵雷达任务调度性能分析,为了比较文中提出方法的有效性,在相同的条件下分别用经典最早截止时间优先 (EDF)算法和基于遗传算法(GA)的任务调度算法进行仿真对比,结果如图5所示。
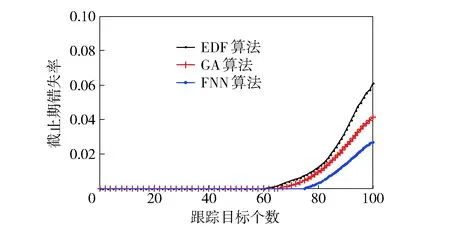
图5 任务截止期随跟踪目标数的变化曲线Fig.5 Relation between deadline of task and amount of tracking object
图5是同一场景下3种调度算法的任务截止期随跟踪目标数的变化曲线,从图中可以看出当跟踪目标数目分别达到60、64和78时,EDF算法、GA算法以及FNN算法部分低优先级任务调度失败。当跟踪目标数目达到78时,此时EDF算法MDR为0.017,删除了部分跟踪任务,以保证高优先级任务正常调度。同样是人工智能的GA算法,在资源受限的情况下任务调度效率低于FNN算法。从时间资源的角度看,FNN算法把更多的时间分配给高优先级任务,这得益于优先级分配网络根据任务的各参数智能地分配任务优先级,执行效率比EDF更加高效。
进一步可以看出,3种算法在目标数目较少时性能相似,但在密集目标条件下,FNN算法要优于其他2种算法。这是因为在目标数目较小时,所有低优先级任务都可以被调度;当目标数目较多时,甚至删除了部分跟踪任务;而在目标数量达到饱和时,FNN算法根据雷达经验,考虑到不同目标参数,而不仅是任务的工作方式优先级,相对于其他2种算法要更智能,尽可能的保留了需要紧迫执行的任务。因此,FNN算法无论是在成功调度任务数量上还是质量上,均满足作战需要。
4 结论
相控阵雷达任务优先级分配是一个复杂的过程,由于目标参数和优先级分配难以用数学语言描述,难以建立数学模型。文中借鉴模糊控制不依赖被控对象的精确数学模型的特点,利用神经网络可以无限逼近非线性函数的能力,提出了基于FNN的相控阵雷达任务调度方法。
仿真结果表明:1)模糊控制可以从目标参数等海量变量中筛选出关键信息,克服了传统控制理论在复杂系统或难以精确描述的系统中存在的信息拥堵问题;2)RBF神经网络利用样本数据调整节点权值,智能地实现了目标参数和任务优先级之间非线性映射,解决了难以建立任务优先级数学模型的问题;3)FNN算法在相控阵雷达目标数量饱和的情况下,在保证高优先级任务被调度的同时,使得更多的任务得到调度执行,其性能优于传统任务调度方法。
在目标参数上,本文只考虑了影响比较大的5个参数(目标属性、距离、速度、高度和方位)。采用不同的参数,其分配的优先级也不同,如何选择目标参数对于FNN算法的优劣影响巨大,这这些都是值得进一步研究的内容。
References)
[1] 卢建斌, 胡卫东, 郁文贤. 多功能相控阵雷达实时任务调度研究[J]. 电子学报, 2006, 34(4):732-736. LU Jian-bin, HU Wei-dong, YU Wen-xian. Study on real-time task scheduling of muitifunction phased array radars[J]. Acta Electronica Sinica, 2006, 34(4):732-736. (in Chinese)
[2] 周颖, 王雪松, 汪连栋, 等. 基于遗传算法的相控阵雷达最优化调度研究[J]. 系统工程与电子技术, 2005, 27(12):1977-1980. ZHOU Ying, WANG Xue-song, WANG Lian-dong, et al. Optimal scheduling for phased array radar based on genetic algorithm[J]. Systems Engineering and Electronics,2005, 27(12):1977-1980. (in Chinese)
[3] 赵宇, 李建勋, 曹兰英, 等. 基于二次规划的相控阵雷达任务自适应调度算法[J]. 系统工程与电子技术, 2012, 34(4):698-703. ZHAO Yu, LI Jian-xun, CAO Lan-ying, et al.Adaptive scheduling algorithm based on quadratic programming for multifunction phased array radars[J]. Systems Engineering and Electronics,2012, 34(4):698-703.(in Chinese)
[4] Jang D S, Choi H L, Roh J E. A time-window-based task scheduling approach for multi-function phased array radars[C]∥11th International Conference on Control, Automation and System. Seoul, Korea: ICCAS, 2011:1250-1255.
[5] Kuo T W, Chao Y S, Kuo C F, et al. Real-time dwell scheduling of component-oriented phased array radars[J]. IEEE Tansactions on Computer, 2005, 54(1):47-60.
[6] Gopalakrishnan S, Caccamo M, Shih C S, et al. Finite-horizon scheduling of radar dwells with online template construction[J]. Real-Time Systems, 2004, 33(1/2/3):47-75.
[7] Gupta S, Kashyap S. Forecasting inflation in G-7 countries: an application of artificial neural network[J]. Foresight, 2015, 17(1):63-73.
[8] 姚敏, 赵敏. 基于模糊神经网络的小卫星任务自主调度设计[J]. 宇航学报, 2007, 28(2):385-388,426. YAO Min, ZHAO Min.Small satellite task autonomous scheduling design method based on fuzzy neural network[J]. Journal of Astronautics, 2007, 28(2):385-388,426. (in Chinese)
[9] Farina A, Neri P. Multitarget in terleaved tracking for phased array radar[J]. IEE Proceedings, Part F - Communication Radar and Signal Processing, 1980, 127(4):312-318.
[10] 郑玉军, 田康生, 邢晓楠, 等. 基于小生境遗传算法的相控阵雷达任务调度[J]. 现代防御技术, 2016, 44(1):168-174. ZHENG Yu-jun, TIAN Kang-sheng, XING Xiao-nan,et al. Optimal scheduling for phased array radar based on niche genetic algorithm[J]. Modern Defence Technology, 2016,44(1):168-174. (in Chinese)
[11] 周颖, 王国玉, 王雪松, 等. 基于启发式遗传算法的相控阵雷达最优化调度[J]. 系统工程与电子技术, 2006, 28(7):992-996,1005. ZHOU Ying, WANG Guo-yu, WANG Xue-song, et al. Optimal scheduling using hybrid GA with heuristic rules for phased array radar[J]. Systems Engineering and Electronics,2006, 28(7):992-996,1005. (in Chinese)
Task Scheduling Design of Phased Array Radar Based on Fuzzy Neural Network
ZHENG Yu-jun, TIAN Kang-sheng, ZHANG Jin-lin, LIU Jun-kai
(Air Force Early-warning Academy, Wuhan 430019, Hubei, China)
As the task scheduling of phased array radar is a complex nonlinear optimization process, a mathematical model is difficult to be established for task priority, which may affect the efficiency of task scheduling. A phased array radar task scheduling algorithm is proposed based on self-adaptive fuzzy neural network. The proposed scheduling algorithm has neural network autonomous learning ability and fuzzy control capacity for dealing with uncertain information. The simulated result shows that the method is effective. The method can be used to schedule and implement more tasks while scheduling the tasks with higher priority under the condition of saturated object number.
ordnance science and technology; neural network; fuzzy theory; phased array radar; priority; task scheduling
2016-01-06
国家自然科学基金项目(61302193);全军军事类研究生资助项目(2014JY548)
郑玉军(1988—),男,博士研究生。E-mail:junleida@163.com; 田康生(1963—),男,教授,博士生导师。E-mail: tiankangsheng@tom.com
TN958.92
A
1000-1093(2016)11-2010-05
10.3969/j.issn.1000-1093.2016.11.007
