一种太阳能无人机用MPPT控制器
2016-12-15呼文韬张丹红刘敏娟李雅迪
呼文韬,张丹红,刘敏娟,李雅迪
(1.中国电子科技集团公司第十八研究所,天津300384;2.北京科技大学,北京100083)
一种太阳能无人机用MPPT控制器
呼文韬1,张丹红1,刘敏娟1,李雅迪2
(1.中国电子科技集团公司第十八研究所,天津300384;2.北京科技大学,北京100083)
太阳能无人机的能源系统由太阳电池阵、储能电池组、控制器以及配电器组成,由于安装太阳电池的飞机机翼外形为多曲面形状,安装于其上的太阳电池在同一时刻所受光照强度不同,这就造成不同子阵之间的电流不同,按照传统的方法直接互连达到指定电压,则太阳电池各个子阵之间必然发生工作点相互钳位问题造成系统发电能力降低,在太阳高度角较低的早晚时刻甚至造成能源系统失效。提出了一种升降压型MPPT控制器,该控制器由H桥式DC-DC电路组成,在输入端控制器实时追踪太阳电池的最大工作点,在输出端控制器根据外部电路情况通过升降压变换,使多模块之间实现工作点匹配,从而实现太阳电池阵功率的最大程度输出,提升能源系统发电效率,给出了控制器的追踪算法,控制逻辑,并对可行性进行了分析。
MPPT;H桥;工作点协调;升压;降压
太阳能无人机太阳电池阵,是多个太阳电池组件通过串并联组合构成的光伏阵列,许多因素会造成各个太阳电池组件输出特性不一致,这些因素包括:(1)组件老化程度不一致;(2)由于尘土、脏物的遮挡,造成组件所受阳光辐射产生差异;(3)由于机翼不规则外形造成的安装角度差异,使得不同组件所受的辐射量、热梯度、反照率等存在差异。太阳电池组件特性不一致将对阵列的整体性能产生不利的影响。例如,在多个组件构成的串联回路中,总的输出电流由发电能力最差的组件限制,使得组串中其他组件的功率无法全部输出。
为了解决组件输出特性差异对整个光伏发系统造成的不利影响,提高系统的整体效率,最有效的手段就是采用分布式控制方式,通过对尽可能小的组件集合分别进行MPPT控制。其中,分布式MPPT系统主要包括两种拓扑形式,即组串式MPPT结构以及组件式MPPT结构。
组串式MPPT结构即组件串联后接逆变器,MPPT是由单台逆变器对组串的统一控制实现。应用条件为光伏组串输出电压在150~450 V或者更高,功率等级可达几个kW左右。与多个组件串联支路直接并联后共用一个大型变流器的集中式MPPT结构相比,组串式结构主要有三个优点,即:(1)无需设置阻塞二极管,可降低阵列的损耗;(2)每个组串都有逆变器,可实现组串的MPPT,系统的扩展能力及冗余能力都较强;(3)不需要直流母线。
尽管组串式结构有很多优点,整个系统的性能也得到了提升,但只是将太阳电池组件的集合范围缩小到一个串联支路,支路内部各个组件的特性差异问题依然无法从根本上解决,由此造成的热斑现象、阴影造成的功率损失、功率多峰特性等问题仍无法解决。
为每一个太阳电池组件都配备一个微型DC/DC功率变流器,以改变其输出特性,使其始终工作在最大功率点上,再将这种复合的单元进行串、并联连接,就可以组成一个高效率的光伏发电阵列,彻底解决集中式和组串式系统结构存在的问题。
1 MPPT算法研究
传统的MPPT方法按照判断方法和准则的不同,可分为开环、闭环MPPT方法以及智能MPPT控制方法。其中开环MPPT方法主要包括恒定电压法、短路电流比例系数法、差值计算法;闭环MPPT方法包括扰动观测法、变步长扰动观测法、电导增量法、变步长电导增量法;智能控制方法主要包括基于模糊理论的MPPT控制、基于人工神经网络的MPPT控制、基于智能方法的MPPT复合控制。工程实践中应用较多的是定步长或变步长的扰动观测法、定步长或变步长的电导增量法。扰动观测法、电导增量法等自寻优搜索控制算法,一般存在最大功率点附近的震荡和误判问题,传统的滞环比较法可以较大程度地避免震荡和误判现象,但是仍然存在追踪速度与精度的问题。
本文提出了一种改进型MPPT控制算法,其基本思想是通过不断地对双向扰动的输出功率进行比较,同时自适应地调整滞环宽度,快速逼近最大功率点。MPPT追踪初期步长选择较大,可快速定位最大功率点的区域;到达最大功率点附近区域后不断减少环宽直至小于阈值,可有效提高追踪的精度。
MPPT控制算法的流程如图1所示。其中开始部分主要是实现初始电压以及初始占空比的设定。一般情况下,从比开路电压略低的初始电压UA开始,对电压进行双向扰动,即分别加、减一个步长,得到两个观测点UB=UA+ΔU以及UC=UAΔU,计算并存储这三个观测点对应的功率PA、PB、PC,令ΔP1=PB-PA、ΔP2=PA-PC。根据ΔP1和ΔP2的大小及符号,判断下一步的观测策略。如果ΔP1和ΔP2的符号相同且为正号,则以UB为新的观测点UA',重复以上观测步骤;如果ΔP1和ΔP2的符号相反,说明MPP点在UB与UC之间,此时继续以UA点为观测点,将观测步长ΔU减小一半,继续观测。在重复以上观测的过程,当步长ΔU小于给定的电压控制精度时,就认为找到了MPP点。
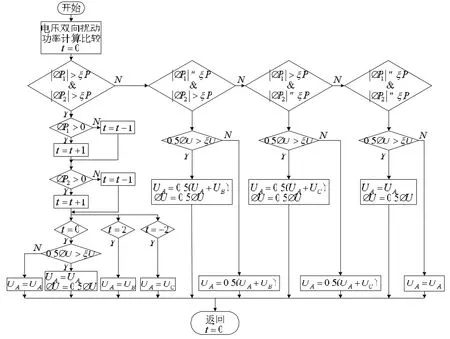
图1 MPPT控制算法流程图
图2(a)用P-V曲线表示了采用改进的MPPT算法在光照条件为1 000、800和500 W/m2三种情况下的跟踪效果。图中,曲线上的小圆圈是追踪到的最大功率点,由仿真模型自动标记。图2(b)表示了采用该MPPT方法的追踪过程。光照条件在0.04 s处由1 000 W/m2突变为500 W/m2,可以看出,系统追踪到的功率值以及电压值与按照太阳电池组件的模型计算的结果完全吻合,进一步说明了该算法是快速、准确的。
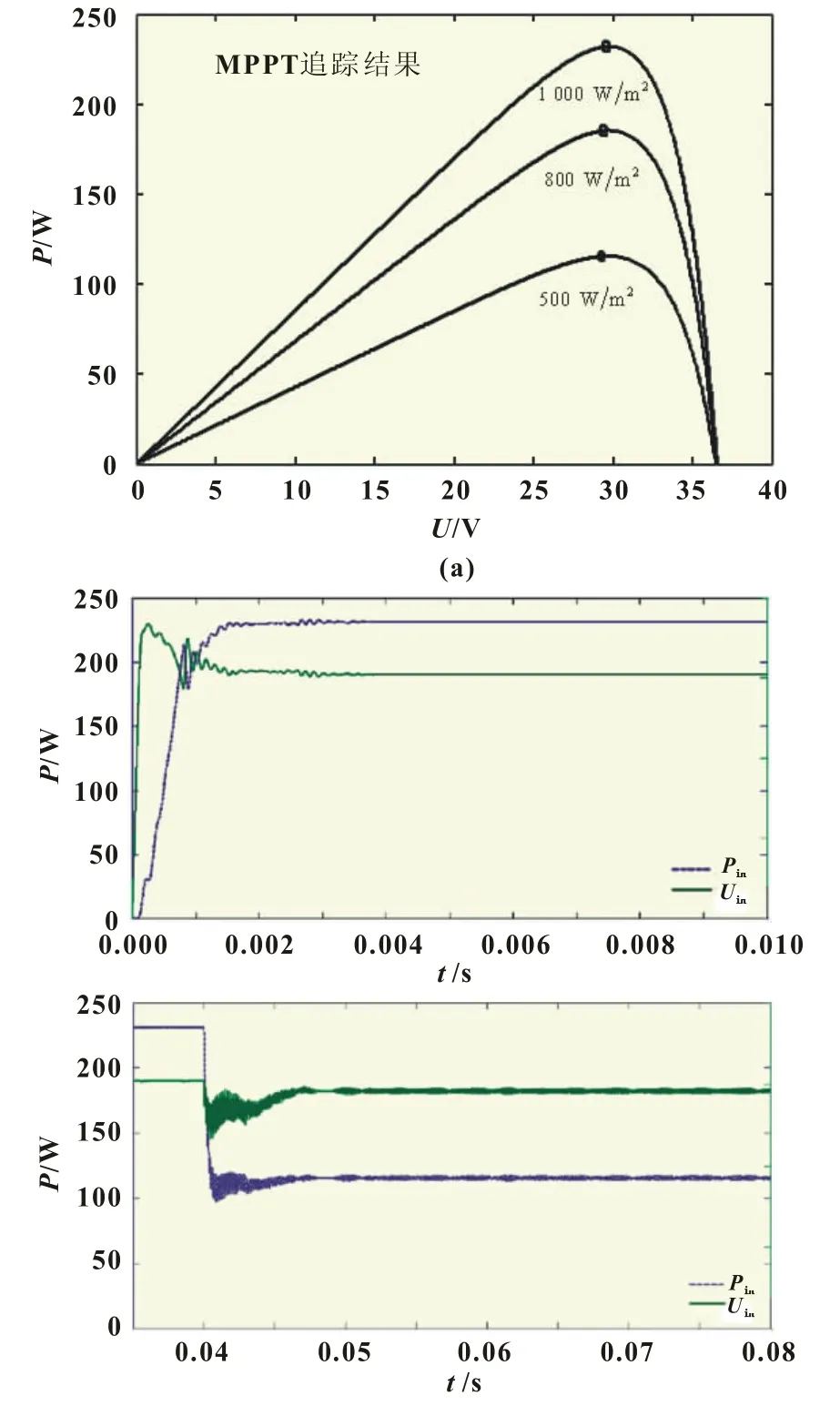
图2 MPPT控制算法追踪的追踪效果
2 控制器工作逻辑分析
MPPT控制器采用的微型DC/DC变换器主电路如图3所示。
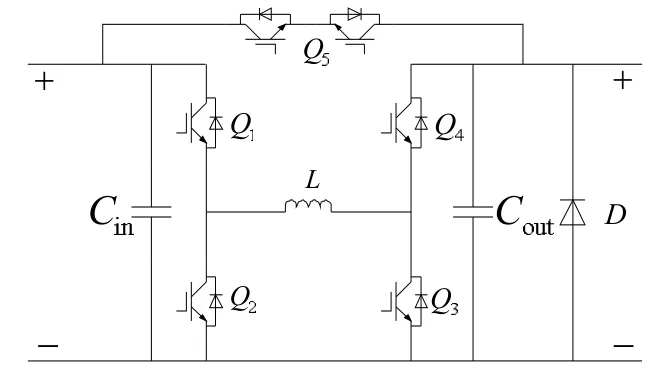
图3 DC/DC变换器的主电路结构图
通过工作条件的分析,确定了DC/DC电路的工作模式及其切换过程,包括旁路(standby,STB)、直通(panel mode,PM)、升压(Boost)、降压(Buck)等四种工作模式,工作模式间的切换流程可结合图4进行简要说明。
在初始化阶段,首先进入STB(旁路)模式,太阳电池组件相当于开路状态,在此模式下等待一段时间tSTB后尝试进入工作模式,开始追踪MPP,追踪稳定后检测输出功率值,判断是否超过所设定的功率门槛值Pstart_min,若不符合条件,则表示光照太弱或者组件工作失效,则重新进入STB模式。
从初始状态开始工作时,首先进行STB模式向Buck(降压)模式的切换,通过控制微型DC/DC变流器,使输入侧电压从开路电压值开始逐步减小,输入侧功率随之增大,系统的工作点向MPP靠拢。随着输入侧电压降低、输出侧电压逐步升高,如果输入侧电压与输出侧电压相等时,系统仍未达到MPP点,则进行切Buck模式向Boost模式的切换,进一步降低输入电压,同时增大输入功率,直至达到MPP点。
当系统到达MPP点时,若输入电压与输出电压满足|Vout-Vmpp|<0.02Vmpp的关系,说明此时DC/DC的控制效果微乎其微,系统可以直接将太阳电池组件与输出端相连,反而可以减小损耗、提高效率。此时,系统将主动转入PM(直通)模式。
当系统稳定工作时,如果出现两种情况之一,将重新启动MPPT过程:(1)系统已稳定工作了足够长的时间,或者处于PM模式工作超过了一定的时间。这些时间间隔均可设定,主要的目的是为了避免光照或者负荷缓慢变化而使系统偏离最大功率点;(2)系统的输出功率变化超过一定限值ΔP。该限值可以设定,主要的目的是为了适应光照或负载的突然或快速变化而导致系统最佳工作点的偏离。
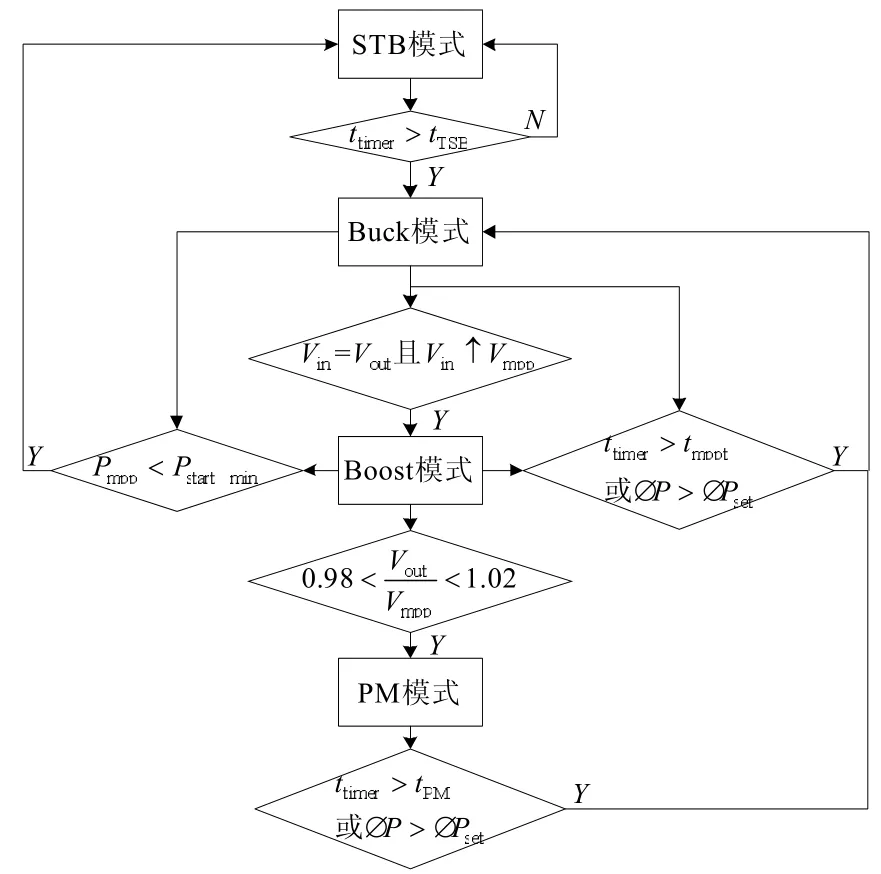
图4 MPPT控制器的控制流程
3 多MPPT控制器协同工作可行性分析
通过太阳电池组件和MPPT控制器的等效建模,构建了复合单元的模型。该模型可以看作是在一定的光照、温度等外界条件下的恒功率源,因为工作点自协调MPPT功能可以保证太阳电池组件总以最大值输出功率。微型DC/DC变流器相当于一个电压、电流变换器,变换前后的功率相等。因此,如果不考虑损耗,控制器向负载提供的功率就将与从太阳电池组件获取的功率完全相等,这实际上也是实际的MPPT控制器设计的初衷。以下是基于这个论点,对分布式发电系统各单元模块之间协调工作机理的分析。
图5表示了N个MPPT模块串联的系统,每个模块所受的光照条件分别为S1、S2…SN;温度条件分别为T1、T2…TN;输出恒功率Pm1、Pm2…PmN。

图5 MPPT模块串联模型
则负载获得的功率为:

由于各个组件式串联关系,因此必然有:

尽管各模块的端口电压Ui2是未知的,但由于存在电流、电压的约束条件,由式(1)和(2)可得:

若某一时刻第i个模块的外界条件发生突变,仍可由式(1)及式(2)得到:
通过对式(4)的分析,可知在所有模块的输出功率及负载确定的条件下,下列结论成立:
(1)串联支路的总电流由所有模块的总功率及负载情况决定;
(2)各模块的输出端电压按照其输出功率占所有模块的总功率的比例自动分配;
(3)当某个模块的输出功率增大(或减小)时,串联支路的总电流将增大(或减小);相应地,该模块两端的电压将增大(或减小),而其他模块两端的电压均将减小(或增大)。
利用这些结论,可以很好地解释分布式光伏系统各模块之间的协调工作过程,包括一个模块从接入到切除过程中系统的调节过程。理解这一过程的关键,是工作点自协调MPPT控制器模块表现出“功率源”的特性,即端口的电压和电流存在约束关系,但模块本身没有限定解,只有当模块接入电路时,电压或电流之一就受到外界约束,才可以确定唯一解;当电路条件发生变化时,端口电压和电流也发生变化,但输出的功率保持不变。
4 结论
本文提出了一种具备升降压功能的MPPT控制器,由于这种控制器具备功率源特性,其输出端口可以根据外部电路表现自动进行工作点协调,从而实现了不同工作点太阳电池阵串联工作,解决了太阳能无人机曲面安装太阳电池阵造成的工作点钳位问题。
[1]刘大海,阎键,张健勇,等.平流层飞艇的能源技术和平衡分析[J].航天返回与遥感,2006,22(2):6-13.
[2]高广林,李占科,宋笔锋,等.太阳能无人机关键技术分析[J].飞行力学,2010,28(1):1-4.
[3]李国欣.航天器电源系统技术概论[M].北京:中国宇航出版社, 2008:269-412.
[4]马世俊.卫星电源技术[M].北京:中国宇航出版社,2001:236-240.
[5]刘治钢,蔡晓东,陈琦.采用MPPT技术的国外深空探测器电源系统综述[J].航天器工程,2011,20(5):105-110.
Research on a MPPT controller suitable for solar UAV
HU Wen-tao1,ZHANG Dan-hong1,LIU Min-juan1,LI Ya-di2
(1.Tianjin Institute of Power Sources,Tianjin 300384,China;2.University of Science&Technology Beijing,Beijing 100083,China)
The solar energy UAV energy system is composed of solar array,energy storage battry,controller and electrical equipment.Because the wing is a multi surface shape,the solar cell installed on it at the same time by the light intensity is different,which causes a series of solar cell circuit current limited,resulting in reduced system power generation capacity.In this paper,a MPPT controller with Boost and Buck function was proposed,composing of H bridge DC-DC circuit.At the input end of the controller,the solar cell maximum working point could be tracking in real time;at the output terminal of the controller and according to the external circuit,the work points could be matched between the multi controllers through the Boost or Buck transformer,so as to enhance the efficiency of the energy power system.The MPPT algorithm and the control logic of the controller were given and its feasibility was analyzed.
MPPT;H bridge;work point coordination;Boost;Buck
TM 921.5
A
1002-087 X(2016)10-1961-04
2016-08-15
呼文韬(1984—),男,天津市人,工程师,主要研究方向为临近空间飞行器能源系统管理技术。
