面阵数字航测相机实验室校准装置的设计与实现
2016-12-15李月锋
李月锋
(西安测绘总站,陕西 西安 710054)
面阵数字航测相机实验室校准装置的设计与实现
李月锋
(西安测绘总站,陕西 西安 710054)
随着面阵数字航测相机在航空摄影领域的广泛使用,其参数校准成为亟待解决的关键问题。本文首先阐述了精密测角法的校准原理,在此基础上设计了基于大口径长焦距平行光管、精密测角转台和亚像素目标定位算法的面阵数字航测相机校准装置;其次通过对装置的误差分析,证明了该装置精度满足测绘行业标准中对数字航测相机的校准精度的要求;最后验证了该装置对面阵数字航测相机的实验室校准是可行的。
精密测角法;面阵数字航测相机;内方位元素;畸变模型
用摄影测量方法描述被摄物体的几何信息和物理信息时,必须建立图像中的像点位置和空间物体点位置的相互对应关系,而这种对应关系是由相机成像模型及相机参数决定的。由于相机镜头的光心、光轴及焦距等参数并不是物理上的实体,是看不见摸不着的,它们更多的是经过试验后的数学分析模型的参数。因此,对相机校准的目的就是通过试验和计算来确定其参数。由最佳对称主点坐标和主距组成的内方位元素,以及相机的畸变,是数字航测相机的重要技术指标和内业测图的重要技术参数,直接关系到摄影测量成像的质量和精度[1-3]。
目前数字航测相机校准使用的方法主要有校准场法和实验室法[4-8]。校准场法更接近于实际飞行状态,实验室校准采用精密测角法原理,适用于对精度要求较高的量测型数字相机的校准。数字航测相机按照成像原理可分为线阵数字航测相机和面阵数字航测相机。面阵数字航测相机与传统的画幅式胶片相机的成像原理完全相同,可以看成是把焦平面上的胶片换成了面阵CCD,相比较于线阵数字航测相机的多线阵推扫成像模式,面阵数字影像是面中心投影,相机无需一直处于曝光状态,几何特性相对稳定,POS系统对于面阵相机而言也不是必须的设备[9],因此,其校准工作更易于在实验室内精确完成。
本文基于实验室精密测角法,采用大口径长焦距平行光管、精密测角转台和亚像素目标定位算法等设计的面阵数字航测相机校准装置,实现面阵数字航测相机的实验室校准。
一、精密测角法校准原理
精密测角法光学原理如图1所示。平行光管作为目标发生器模拟无穷远目标,一维精密测角转台作为角度测量单元,提供角度基准。相机安置于转台上,对相机和平行光管的光路系统进行对准和调平,驱动转台旋转,使相机每隔一定角度对平行光管星点成像,通过CCD细分算法解算星点目标像中心位置坐标,记录像点像素坐标和转台角度值。将相机旋转90°,重复上述测量过程,得到另一坐标轴的校准数据。利用畸变平方和最小的约束条件,根据最小二乘算法计算相机内方位元素和畸变[10-12]。
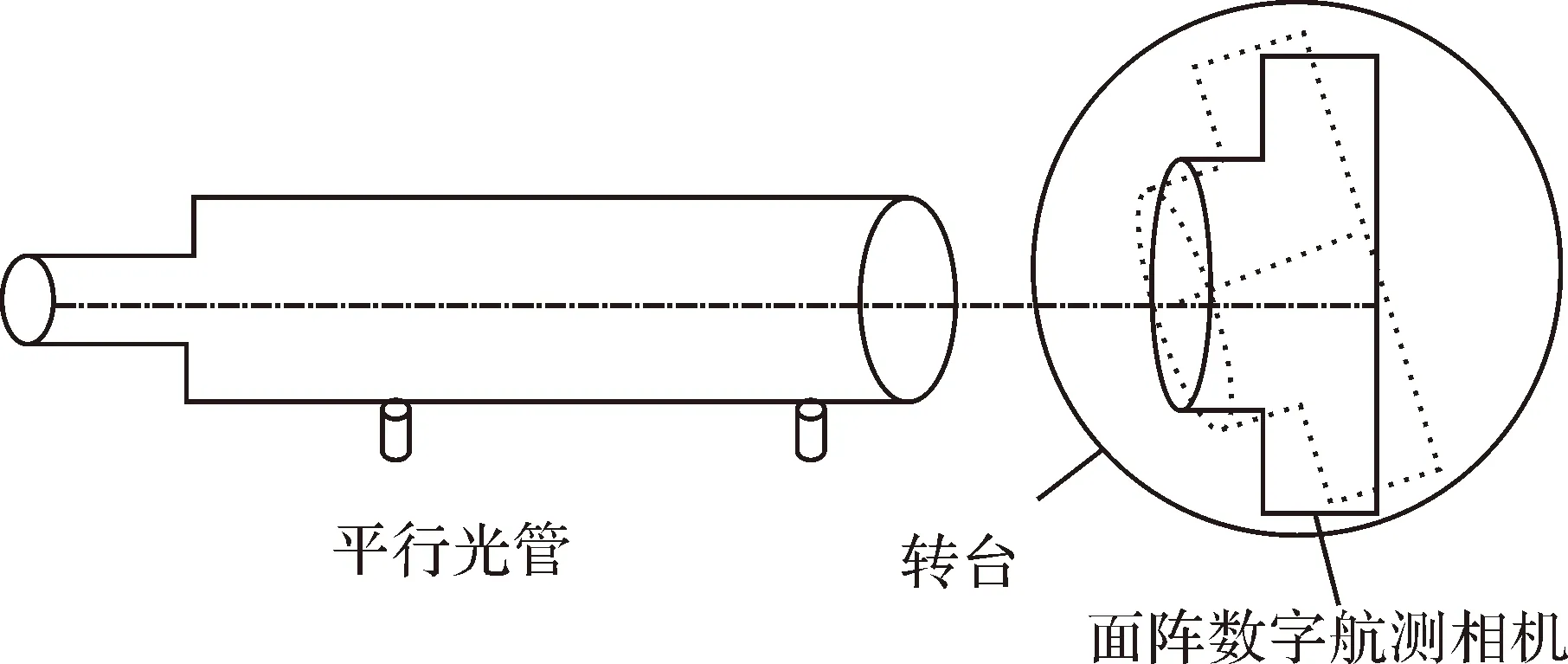
图1 校准光学原理
数字航测相机实验室校准内容主要包括以下几个方面:①最佳对称主点(x0,y0);②主距f;③畸变系数,包括径向畸变系数和偏心畸变系数[13]。
以面阵数字航测相机焦平面一个方向(X方向)为例,在考虑主点位置偏移的情况下,精密测角法的几何原理如图2所示。图中H为相机镜头的后主点,O为相机CCD靶面中心,P为像面主点位置,角度ΔW为主点P对应H点的角度,p为主点到面阵中心的距离在X方向上的分量,Si为转台转动角度为Wi时目标成像的位置,Xi为Si在X方向上的分量,f为主距。
主点和主距的表达式为
(1)
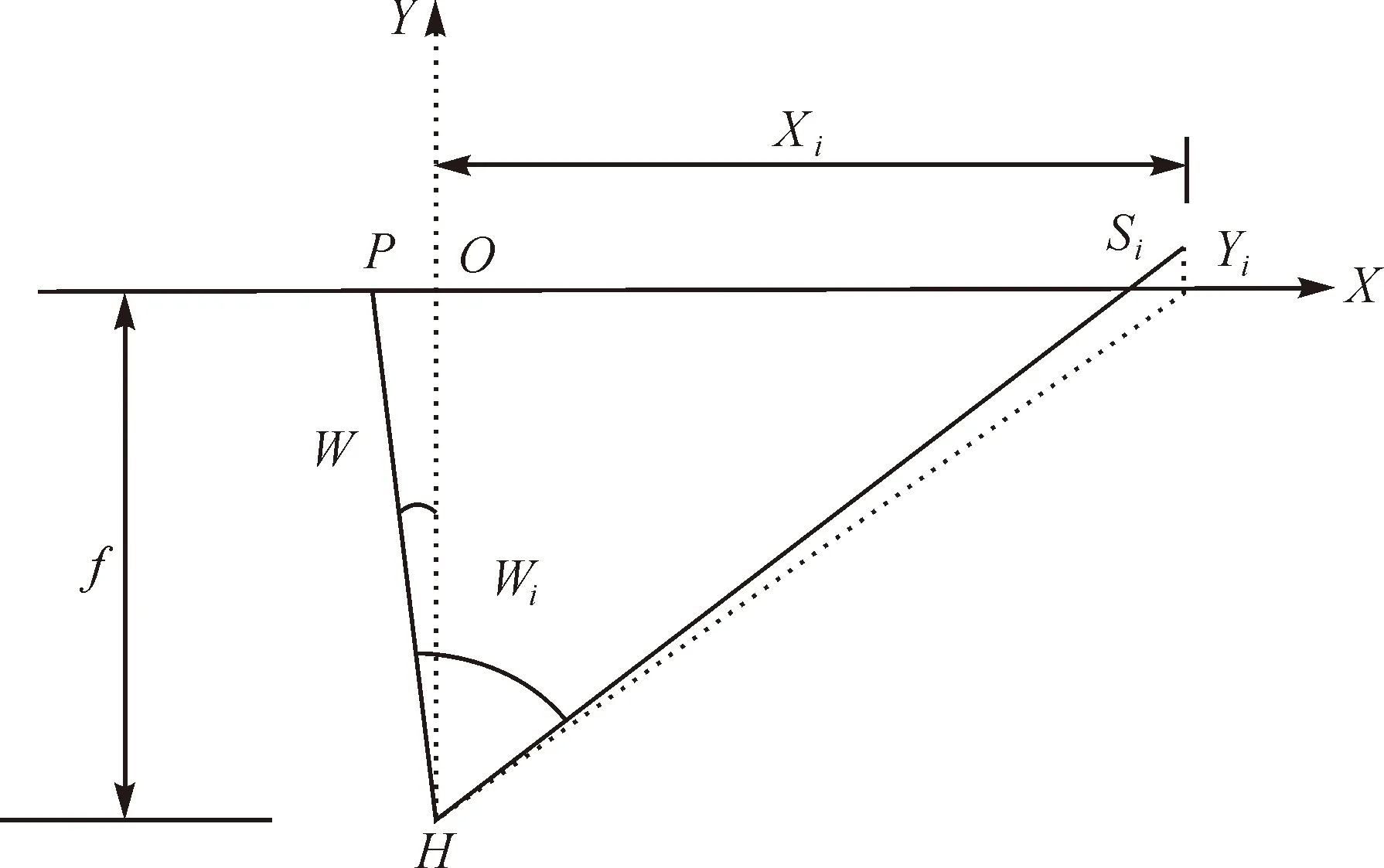
图2 精密测角法几何原理
畸变系数解算采用十参数模型。十参数模型是一种物理模型,每一个畸变参数都具有明确的物理含义,如镜头形状不规则引起的径向畸变、镜头器件光学中心不共线引起的偏心畸变等。目前针对十参数模型的研究比较成熟,该模型可以很好地反映相机成像过程中的系统误差,而且模型算法容易实现,参数解算精度较高,适合高精度的摄影测量任务。其表达式为
(2)
式中,k1、k2、k3为径向畸变系数;p1、p2为偏心畸变系数;b1、b2为像平面畸变系数。
二、 面阵数字航测相机校准装置设计
面阵数字航测相机校准装置集成光、机、电、自动控制和软件算法于一体,整体上可分为硬件、软件两个部分。硬件部分由目标发生器(平行光管)、精密测角转台(含工控机)、气浮隔振平台、相机夹持具、被测相机等组成;软件系统由系统调试、相机校准、数据处理和证书生成等部分组成。
1. 硬件系统
面阵数字航测相机校准装置主要设备包括平行光管、转台和气浮平台等,如图3所示。

图3 面阵数字航测相机校准装置
各部分功能如下:
1) 目标成像部分:含星点板的平行光管,作为目标发生器,模拟无穷远目标,清晰成像于被测相机CCD靶面。本文采用F1600平行光管,配合孔径大小为0.05、0.1、0.2、0.3、0.4、0.5 mm的星点板。
2) 角度基准部分:精密测角转台,驱动被测相机按设定需要旋转,提供角度基准数据。转台由电控系统与结构部分组成,结构部分由高精度轴系、测角系统、微调锁紧机构、调平机构等部分组成。本文中测角组件采用海德汉公司生产的29位绝对式光学编码器,转台最终的测角精度可达2″。
3) 环境控制部分:相机校准精度容易受地面震动、人员走动等因素的影响,因此,在试验过程中,要尽量避免或减小这些环境因素的影响。本文采用自动平衡精密隔振光学平台,可实现隔振减震的效果,为试验提供稳定可靠的试验隔振环境。
4) 被测相机夹持调整装置:由多种不同功能光具座组合而成,可实现被测相机三维平移,两维倾斜调整。
2. 软件系统
软件系统基于VC++6.0进行编程开发,从功能上可分为系统调试、相机校准、数据处理[14]和证书生成4个模块。其中,系统调试模块主要包括转台调试和相机调试功能,完成被校相机参数调试、校准光路系统的调平与对准;相机校准模块包含转台自动旋转设置与相机自动曝光设置功能,完成被校相机的自动校准;数据处理模块导入转台测角数据和星点成像定位数据,导出计算结果;证书生成模块导入计算结果,输入与校准有关的信息,自动生成校准证书。软件流程如图4所示。
3. 装置误差分析
以无人机搭载的面阵数字航测相机为例进行装置误差分析[15-16]。相机主距f=90 mm,像素尺寸为9 μm,转角范围为-13°~13°(转台零位对应相机面阵中心),每隔0.5°采样一次。
由式(1)可得主点和主距误差为
(4)
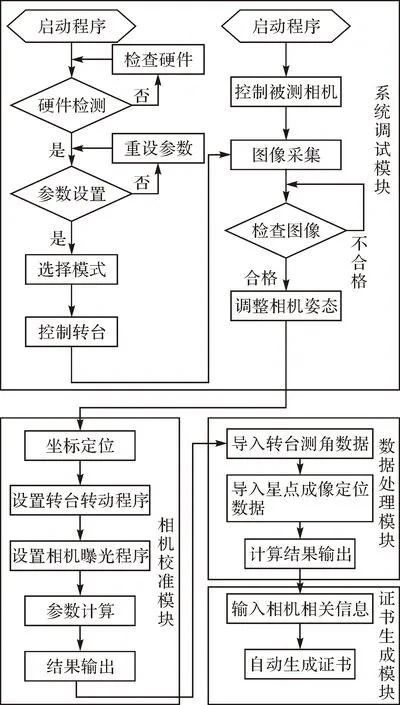
图4 软件流程
由主点、主距可得畸变误差公式为

(5)
式中,δx为星点光斑成像定位误差;δA为转台测角误差。本文采用椭圆拟合算法进行星点光斑定位,定位误差为0.1像素(0.9 μm),转台测角误差为2″。则校准装置最终校准精度为:δp=2.2 μm,δf=0.9 μm,δDx=1.5 μm。
测绘行业标准《数字航摄仪检定规程》(CH/T 8021—2010)中对数字航摄仪的校准精度要求如下:主点、主距校准精度优于3 μm,畸变纠正后残差小于1/3像元(3.0 μm)。由误差分析结果可以看出,装置的测量精度满足标准要求。
三、试验情况
利用本装置分别对某型中型测绘无人机搭载的面阵数字航测相机和某具有侦查和定位功能的面阵数字航空相机进行了实验室校准。
1. 试验方法
1) 试验环境准备:开启气浮隔振平台开关,待平台充气稳定5 min后,对平行光管进行精确调平。根据平行光管焦距、相机主距及目标像素覆盖要求,选取孔径合适的星点目标板,安置于平行光管焦平面上,以保证星点的亮度和光谱范围合适。
2) 校准光路调整:将相机安装到精密测角转台上,调整相机夹持器,进行粗略调整,使相机处于水平状态并初步对准平行光管,调整平行光管光轴和像面垂直。
3) 相机校准:按照被测相机视场角设计校准角度范围及校准点个数,驱动转台从视场一端到另一端按一定角度进行旋转,相机对目标板图像采集并存储后,再驱动转台旋转,直至目标成像于相机CCD靶面另一侧边缘。将相机旋转90°,按以上步骤再次测量。
4) 数据处理与结果输出:利用图像采集与数据处理软件系统计算目标像中心坐标,解算相机内方位元素、畸变。
2. 试验结果
采用式(1)和式(2)进行曲线拟合和数据平差处理,解算的相机内方位元素和畸变参数结果见表1。

表1 相机试验结果
无人机面阵数字航测相机畸变曲线如图5所示,侦查面阵数字航空相机畸变曲线如图6所示。

图5 无人机面阵数字航测相机畸变曲线

图6 侦查面阵数字航空相机畸变曲线
从校准结果来看,畸变纠正精度均小于1/3像元(3.0 μm),达到了数字航测相机应用的精度要求。
四、结束语
本文基于大口径长焦距平行光管、精密测角转台、高精度定位算法及畸变模型,设计了对面阵数字航测相机可精确校准的实验室校准系统,校准结果分析表明该系统达到了相关标准的要求,最后通过试验证明了该装置对于面阵数字航测相机的内方位元素和畸变数据校准是可行的。
[1] 陈永明.航空摄影测量[M].北京:中国建筑工业出版社,2003.
[2] 于起峰,尚洋.摄像测量学原理与应用研究[M].北京:科学出版社,2009.
[3] 黄桂平.数字近景摄影测量关键技术研究与应用[D].天津:天津大学,2005.
[4] COMOLLO L, SALA R. Mechanical Calibration and Alignment of an Aerial Photogrammetric Film Scanner Based on a 2D Array Camera[J].Photogrammetric Record,2010,25(130):119-139.
[5] 蒋文松.航摄仪内方位元素、畸变差测定方法的研究[D].郑州:信息工程大学,1990.
[6] 王之卓.摄影测量原理[M].武汉:武汉大学出版社,2007.
[7] 邹勇平,缪剑.数字航测相机的实验室检定与摄影检校[J].测绘通报,2010(12):4-6.
[8] 张烁,申振荣,魏士俨,等. 月面巡视探测器导航和全景相机标定方法研究[J]. 测绘通报,2014(1): 25-27.
[9] 丁启伟.数字航测相机的实验场几何检校技术研究[D].郑州:信息工程大学,2011.
[10] 远国勤.具有前向像移补偿功能的彩色大面阵测绘相机内方位元素标定研究[D].长春:中国科学院长春精密机械与物理研究所,2012.
[11] 沙定国.光学测试技术[M].北京:北京理工大学出版社,2010.
[12] 吴国栋,韩冰,何煦.精密测角法的线阵CCD相机几何参数实验室标定方法[J].光学精密工程,2007,15(10):1628-1631.
[13] 张建霞,王留召,刘先林,等.数字航空摄影测量的相机检校[J].测绘通报,2005(11):41-42.
[14] 徐斌,李英成,刘晓龙,等.附加约束条件的光束法区域网平差在四拼数码航空相机平台检校中的应用[J].测绘学报,2014,43(1):66-73.
[15] 武汉测绘科技大学测量平差教研室编.测量平差基础[M].北京:测绘出版社,2007.
[16] 刘伟毅,贾继强,丁亚林,等.精密测角法中测量对内方位元素标定的影响[J].红外与激光工程,2009,38(4):705-709.
DesignandImplementationoftheLaboratoryCalibrationEquipmentofArrayDigitalPhotogrammetricAirborneSensor
LI Yuefeng
李月锋.面阵数字航测相机实验室校准装置的设计与实现[J].测绘通报,2016(9):73-76.
10.13474/j.cnki.11-2246.2016.0297.
P23
B
0494-0911(2016)09-0073-04
2015-11-18;
2016-02-29
李月锋(1977—),女,硕士生,工程师,研究方向为航空遥感装备计量检定。E-mail:707083613@qq.com