仿真型无功补偿控制器在10kV变电站仿真系统中的实现
2016-12-13国网江苏省电力公司营销技能培训中心史利强潘卫国苏州万龙电气集团股份有限公司韩彦召王玲玲
/国网江苏省电力公司营销技能培训中心 史利强 潘卫国 苏州万龙电气集团股份有限公司 韩彦召 王玲玲/
仿真型无功补偿控制器在10kV变电站仿真系统中的实现
/国网江苏省电力公司营销技能培训中心 史利强 潘卫国 苏州万龙电气集团股份有限公司 韩彦召 王玲玲/
介绍了一种数字仿真型电压无功补偿控制器在10kV典型客户变电站智能仿真实训系统中实现的方法。
仿真型电压无功补偿控制器;10kV典型客户变电站智能仿真实训系统
0 引言
随着电力工业的迅速发展,以及计算机技术和网络技术的应用,10kV变电站系统已经实现了智能化,并建立了综合自动化系统。相应的,针对10kV客户变电站的培训系统也同样需要升级,静态的仿真系统系统已经无法满足10kV客户变电站的培训需求。而采用信号发生器的仿真系统存在着诸多的问题,造价高昂、故障场景设置复杂、可实现场景有限、建设周期长、能耗大、安全系数低等等,难于构建一个现代化的变电站仿真培训系统。同时变电站综合仿真实训系统也朝多功能、数字化和规范化方向发展。而无功补偿培训在10kV仿真实训中是相当重要的,因此研发一种能够模拟运行工况的数字仿真型电压无功补偿控制器,既能让学员直观地看到无功补偿的实物,又能帮助学员深刻理解无功补偿过程中的各种数据参数的变化,且
整个过程中无须主供电回路直接带电,电容器不用真正接入,保证了无功仿真实验的安全性,同时也大大降低了仿真实验的成本。下面结合具体的工程案例对数字仿真型电压无功补偿控制器在10kV典型客户变电站智能仿真实训系统中实现的方法作详细的介绍。
1 概述
10kV典型客户变电站一般采用双电源、双母线的方式运行,主要由两路高压进线、高压联络、备自投、两路高压变压器出线、两个变压器、低压两路进线、低压联络开关、低压无功补偿、多个低压馈线回路组成。图1为高压侧和低压侧的主接线图。
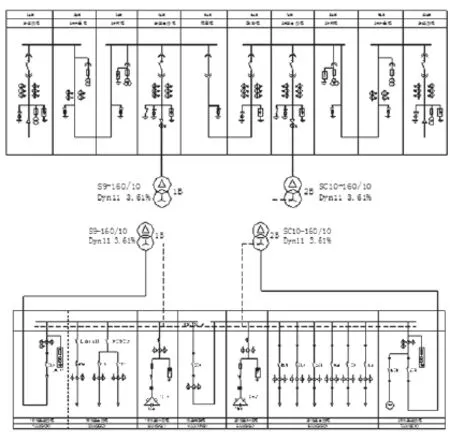
图1 高压侧和低压侧的主接线图
为了实现仿真培训,达到较好的实训效果,系统采用国内首创的二次设备与仿真软件一体化仿真技术:即特别定制二次设备(微机综保、仪表等)以支持系统软件对其电气运行参数进行仿真调整,包括可整定参数和所有电流、电压等测量参数。仿真软件根据系统当前状态进行逻辑运算,运算的结果,通过软件中的变电站模型,写入到相应的保护设备和仪表设备中,保护设备和仪表设备根据写入的数据执行相应的保护或显示等。在此基础上,再通过仿真软件的向导式课件功能来实现场景仿真,包括正常运行状态和故障状态,实现各种仿真教学实训的要求。
10kV典型客户变电站中的无功补偿控制器也需要实现仿真功能,主要是通过接收仿真软件写入的电气参数。根据补偿控制策略执行相应的补偿动作,电容器在投退之后,控制器根据电气参数和投退状态进行重新计算最新的电气参数,并传送给仿真软件系统。系统根据最新的电气参数数据,分发给相关的保护和仪表设备。
2 无功补偿控制器的工作原理
电网输出的功率包括两部分:一是有功功率;二是无功功率。直接消耗电能,把电能转变为机械能、热能、化学能或声能,利用这些能作功,这部分功率称为有功功率;不消耗电能,只是把电能转换为另一种形式的能,这种能作为电气设备能够作功的必备条件,并且,这种能是在电网中与电能进行周期性转换,这部分功率称为无功功率,如电磁元件建立磁场占用的电能,电容器建立电场所占的电能。电流在电感元件中作功时,电流滞后于电压90°。而电流在电容元件中作功时,电流超前电压90°。在同一电路中,电感电流与电容电流方向相反,互差180°。如果在电磁元件电路中有比例地安装电容元件,使两者的电流相互抵消,使电流的矢量与电压矢量之间的夹角缩小,就可以提高电路的供电效率。
如图2所示,无功功率补偿控制器通过对电路中的电流、电压、功率因数等进行采集,并通过对采集参数的计算决定是否投切电容器来补偿负载所需的无功功率,以改善功率因数。无功功率补偿控制器在电子供电系统中所承担的作用是提高电网的功率因数,降低供电变压器及输送线路的损耗,提高供电效率,改善供电环境。所以无功功率补偿控制器在电力供电系统中处在一个不可缺少的非常重要的位置。
电力系统的运行人员在上岗前进行培训时,为了能够直观地理解合理的无功补偿对提高供电质量、节能降损的作用,需要设置一套完整的无功补偿培训系统,使用中还需要进行电路供电,无论从设备成本、教学便利性、使用安全性等方面都限制了无功补偿培训的效果。使用数字式仿真型的无功补偿控制器,即能直观地看到无功补偿过程中的数据和状态变化,又避免了因供电带来的安全性问题。
数字仿真型无功补偿控制器工作原理如图3所示。
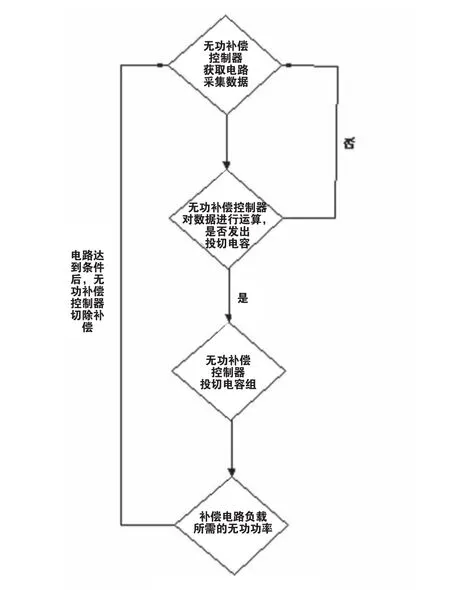
图2 无功补偿控制器工作原理
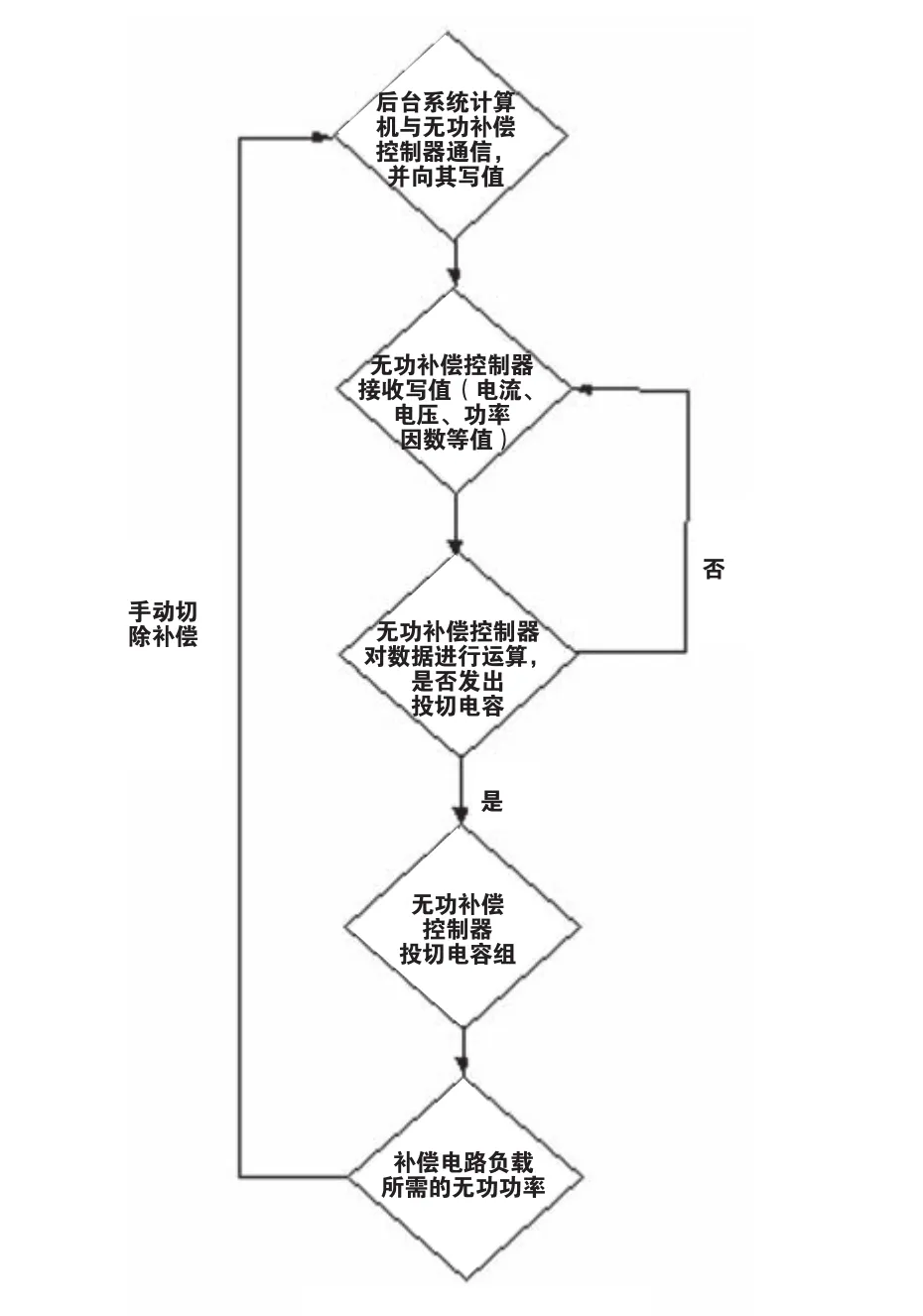
图3 数字仿真型无功补偿控制器工作原理
整个仿真的工程中,数字仿真型无功补偿控制器数据来源由实际采集参数变为后台计算机系统参数写入;电容器投切的过程中由于无需供电主回路供电,电容器没有直接接入供电主回路,不会形成电容器的放电。通过改变数字仿真型无功补偿控制器的输入和输出方式,使其无功补偿培训安全可靠,但数字仿真型无功补偿控制器与无功补偿控制器其实际工作原理和方式没有区别。
3 数字仿真无功补偿控制器的在仿真系统中的实现
3.1 数字仿真型无功补偿控制器参数设置
数字仿真型无功补偿控制器投运前,对无功补偿方式、投切控制方式和定制参数根据自身要求进行相应设置,需设置的定值参数有以下8种。
1)各组电容器容量。
2)按Q控制的无功功率定值。3)按COSφ控制的COSφ定值。
4)允许投切电容器组的电压定值。
5)电容器组电压保护定值。
6)电容时间定值:①投切时间;②闭锁时间:指装置对某组电容器发出投或切指令后,又检测到需要对其发出相反的操作指令。此时为了避免频繁操作,保护电容器开关的安全,设置闭锁时间,只有闭锁时间到,才有可能执行与上次操作相反的命令。
7)电流电压限值设置。
电流电压限值设置包含以下内容:①电流越限值;②最小电流;③标称电压;④电压合格范围定值。
3.2 数字仿真型无功补偿控制器通信仿真过程
1)系统启动时,首先根据变压器实际容量,设定无功补偿控制器的相关参数。目前考虑支持200kVA、250kVA、400kVA、630kVA、800kVA等几种。
2)运行过程中可采用设定U、 I、 COS的方式,作为控制器的采集的电气参数,控制器采用U、 I、 COS的数据,根据控制的补偿控制策略(手动、自动、投功率因数、切功率因数、共补、分补、当前电压值)进行相应的投切动作。
3)运行过程中可采用设定U、 I、 Q的方式,作为控制器的采集的电气参数,控制器采用U、 I、 Q的数据,根据控制的补偿控制策略(手动、自动、投无功功率、切无功功率、共补、分补、当前电压值)进行相应的投切动作。
4)无功投切后,控制器自动进行参数重新计算,若需继续投切,则再次进行投切,同时将数据传输给仿真控制软件,由控制软件进行相应计算和处理。
3.3 数字仿真型无功补偿控制器通信规约
后台计算机采用简化101规约,现场总线网络和RS485接口与数字仿真型无功补偿控制器进行通信。
101规约报文格式全部采用可变帧,格式如下表所示。
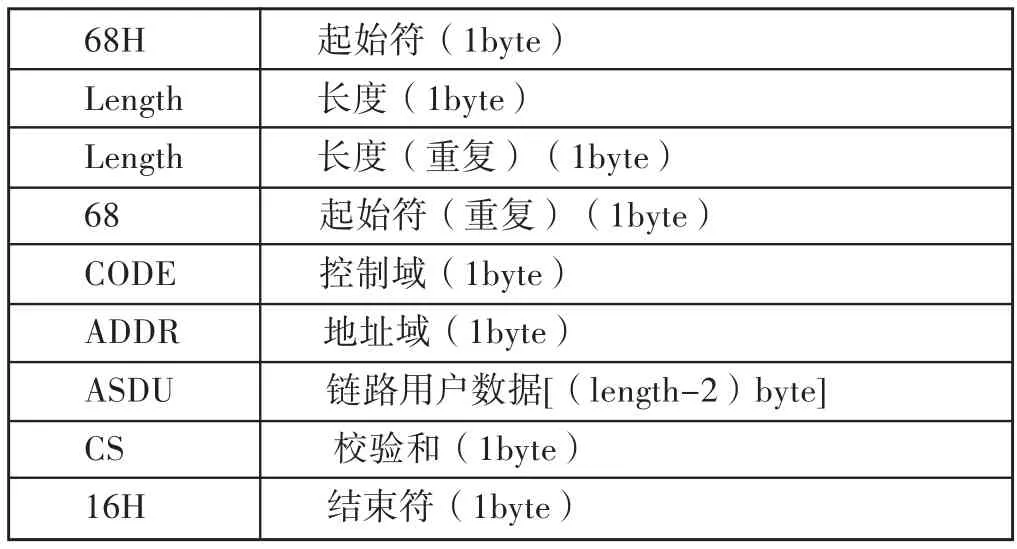
表 101规约报文格式
后台计算机通过通信方式设定无功补偿控制器的电流、电压、功率因数,装置本身不对电流、电压、功率因数进行采样。无功补偿控制器获取了电流、电压、功率因数等参数后,进行运算,当功率因数或无功数值达到控制器的补偿限值后,无功补偿控制器自动进行对电容器的投切,并将投切的后运行参数信息给上传后台计算机;无功补偿控制器对参数进行运算,没有达到补偿限制时,无功补偿控制器不进行投切操作,继续接受后台计算机发送来的参数。
3.4 数字仿真型无功补偿控制器投切电容组
当功率因数或无功数值达到控制器的补偿限值后,数字仿真型无功补偿控制器自动进行电容器的投切,投切后,控制器根据补偿容量,重新计算电路参数,并更新,若需进一步投入电容或切除电容,则再次进行操作,直至电路数据参数达到要求。
为保证电压质量,控制器对电容器组的投切控制以电压为约束条件,以免投、切电容时,造成电压不合格,影响电能质量,或造成频繁投切。当电压超出闭锁范围时,闭锁电容器投切。
投切电容后,控制器根据设置的电容容量进行计算,不是采用电路回路进行计算,因此可以通过断开微断,电容器不与主回路连接,防止电容投入导致的电容供电的大电流问题引起的安全隐患。
3.5 数字仿真型无功补偿控制器其他功能
仿真型无功补偿控制器除了能够以通信方式获取电气参数外,其他与正常无功补偿控制相同,能够进行手动的电容投退,可以通过通信方式进行远程的电容投退。
4 数字仿真型无功补偿控制器的特点
数字仿真型的无功补偿控制器填补了我国在无功补偿实训领域长期无全面、安全的实操设备、不能完全模拟再现现场各种常见故障和无法模拟系统整体运行工况方面的空白。
数字仿真型无功补偿控制器与典型客户现场的无功补偿控制器一致,显示、标示等与真实现场一致;实现了培训与生产实际操作的零距离衔接。安全可靠:数字仿真型无功补偿控制器只需要控制器的工作电源和控制回路电源,电容器并接入电气一次系统,不会产生真正的补偿电流,保证培训师、学员和设备的安全;节省电能:由于全部通信方式、控制器计算、控制系统计算的方式实现,无需真正的负荷和电容,整个使用过程中没有任何的真负载,因此,实训过程的能耗基本上就是控制器本身的电能消耗,基本在10W以内;培训功能齐全:仿真型控制器无需接入真电容,因此可模拟无限制的电容器组,学员可通过功率因数补偿控制设备进行手动投切操作。仿真系统可设定功率因数,学员根据已知条件计算补偿容量,根据计算结果进行手动投切操作,使系统达到规定功率因数。系统可设置补偿电容器的常见故障如:电容器故障;投切装置损坏等。该仿真可实现较多的实训科目:电容补偿装置接线以及原理分析,电容补偿容量计算,新装客户应补偿容量计算,功率因数自动控制装置操作,过补偿系统异常演示,电容补偿故障展示等等。
5 结束语
通过现场总线通信方式给数字仿真型电压无功补偿控制器写入数据的方式代替传统的采集电流、电压的方式,极大地降低了仿真教学培训系统的建造成本,且可以通过写入数据的不同,完成几乎无限制种类的无功补偿仿真教学培训科目。同时,由于主回路无需供电,仅需要给控制器本身电源供电,因此电容器无需直接接入主供电回路,提高了仿真教学培训过程的电气安全性。数字仿真型电压无功补偿控制器具备现场总线接口,通过现场总线,可以将实时数据、定值数据、状态数据传输给后台系统,提升了信息化水平,能够满足现代化的无功补偿仿真教学的要求。
[1]侯俊贤,刘文焯.电力系统数字仿真负荷模型中配电网络及无功补偿与感应电动机的模拟[J].中国电机工程学报,2005, 25(3):8-12.
[2]郭斌.新型全数字静止无功补偿控制器的研究[D].长沙:湖南大学, 2010.
