基于神经网络自适应的吸收塔浆液PH值控制
2016-12-13雷涛锋
雷涛锋
(大唐户县第二热电厂,陕西西安710065)
基于神经网络自适应的吸收塔浆液PH值控制
雷涛锋
(大唐户县第二热电厂,陕西西安710065)
为提高吸收塔浆液PH值控制系统的自适应能力以抵抗系统非线性及干扰的影响,提出了基于小脑神经网络的自适应PID控制器。推导了小脑神经网络自适应控制器,考虑到高阶微分对噪声的敏感性,控制器中只保留比例、积分和微分项,该鲁棒控制器兼有PID控制性能。为了验证鲁棒自适应PID控制器的性能,与常规PID和模糊自适应PID控制器作阶跃响应和抗干扰性能进行了对比,结果表明了鲁棒自适应PID控制器的优越性。
吸收塔浆液PH;小脑神经;自适应;PID
相关资料显示,我国酸雨形成的主要原因来自于SO2的排放,而SO2的排放主要源于火电厂的废气排放,控制SO2的排放已经迫在眉睫[1]。脱硫技术主要包括SO2燃烧前控制、燃烧中控制和燃烧后控制,我国普遍应用燃烧后控制中石灰石-石膏湿法烟气脱硫技术[2]。石灰石-石膏湿法烟气脱硫系统的一项重要参数是浆液PH值,随着SO2的吸收率的升高而增大,当PH值大于6.2时,脱硫产物主要是CaSO3·1 /2H2O,其溶解度很低,极易达到饱和而在塔壁和部件表面上结晶,形成厚的结垢。PH值较低时,虽然结垢减少,但SO2的吸收率也会减小。当PH值降到4.0以下时,SO2的吸收率几乎为零[3]。浆液PH值还会影响石灰石、CaSO4·2H2O和CaSO3·1/2H2O的溶解度,浆液较高的PH值利于SO2的吸收,而较低的PH值利于石灰石的溶解和CaSO3·1/2H2O的氧化,二者矛盾[4]。工程上一般选用浆液PH值在5.4~5.5之间,可以获得较理想脱硫率,同时又可使CaSO3的含量低于1%[5].
浆液PH值控制系统存在大滞后、非变性及时变性等特点,工业上只采用PID控制,固定的参数使得控制系统难以适应环境的变化,PH值的控制难以达到理想的控制效果。文献[3]中提出了模糊PID自整定,具有一定的自适应性,但模糊参数的确定需要有丰富的专家经验知识,并且调试中耗时较长。由于神经网络具有学习系统任意非线性的能力,基于神经网络的PID自适应控制尤其受到广泛关注[6]。Albus在1975年提出的小脑模型关节控制器(CMAC)是一种基于局部逼近的简单快速的神经网络,已被广泛应用于诸多领域[7]。本文鉴于传统PID在一类非线性不确定系统控制中的缺陷,提出了基于CMAC神经网络的鲁棒自适应PID控制方法。
1 CMAC神经网络基本原理
CMAC是一种表达复杂非线性函数的表格查询型自适应神经网络,该网络可通过学习算法改变表格的内容,具有信息分类存储的能力。在这种技术里,每个状态变量被量化并且问题空间被化分成离散状态。量化输入构成的向量指定了一个离散状态并且被用于产生地址来激活联想单元中存储的联想强度从而恢复这个状态的信息。其结构如图1所示。
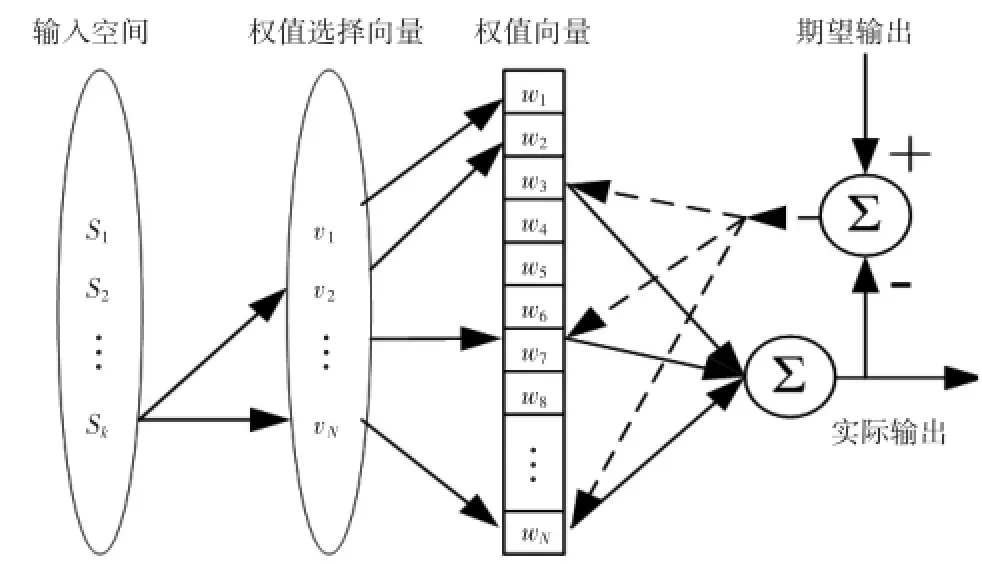
图1 CMAC神经网络结构图
CMAC可以逼近任意的非线性系统,设待逼近的函数为

其中X=[x1,x2,…,xn]T,Y=Yd,Yd为期望输出。
如图1所示,CMAC神经网络通过两个阶段映射实现式(1)关系式。两个映射关系为:
S:X→A,即v=S(X)
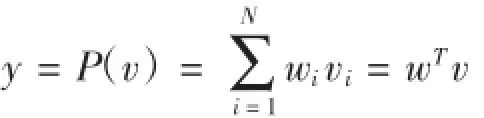
P:A→Y,即Y=P(v)=wTv
其中w=[w1,w2,…,wN]T,v=[v1,v2,…,vN]T,则有
CMAC神经网络的连接权学习算法为

2 鲁棒自适应PID控制器设计
考虑任意的一个非线性系统如式(2)

式中,ai(i=0,1,…,n-1)已知,△为系统运动状态发生改变时系统产生的不确定性,d(t)为未知外部干扰,f(y,…,y(n-1))为未知光滑非线性函数。
定义跟踪误差e=yd-y,代入式(2)可得到


定义系统状态变量为
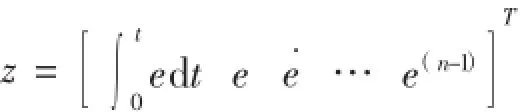
则由式(4)可得系统状态方程为:

式中
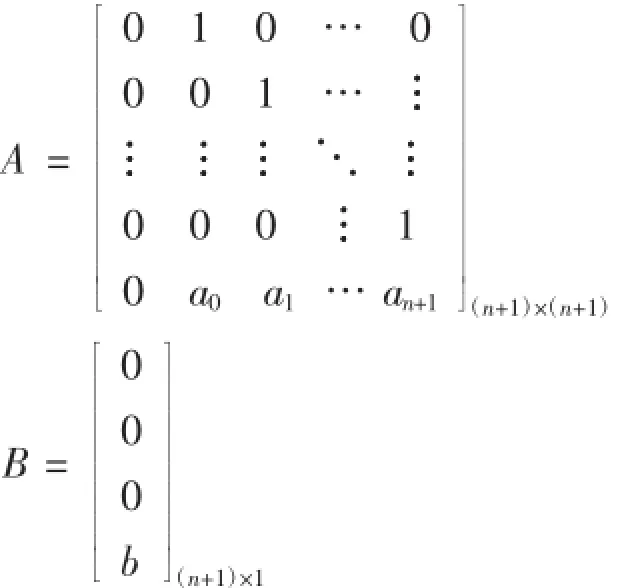


由式(5)可知,可设计鲁棒自适应控制器为

式中,unom=Kz为根据标称系统设计的控制项,自适应控制项为
控制结构图如图2所示。
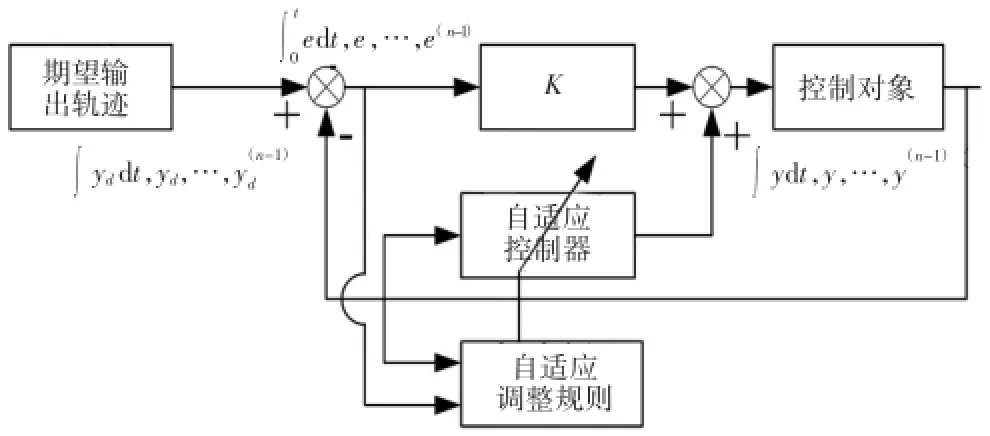
图2 鲁棒自适应控制结构图
式(7)中,反馈增益K由最优控制理论,可得

上式中,对称正定矩阵P满足Riccati方程:

其中,Q为正定对称矩阵,R>0.
CMAC神经网络权值调整规则为:

式中,β为CMAC神经网络权值学习系数。
在式3-9所示的控制器作用下,原系统可被写为

针对上述鲁棒自适应控制器,简化为鲁棒自适应PID控制器,仅留下误差的比例、积分和微分,降低了测量噪声的影响。
由式(5)可得

式中,

则鲁棒控制器变为

CMAC神经网络权值调整规则为

式中,β为CMAC神经网络权值学习系数。
鲁棒自适应PID控制器具有结构简单,参数调整方便,鲁棒性强,自适应能力好等优点,适合于工程应用。
3 仿真研究
为了验证鲁棒自适应PID控制器的性能,进行仿真研究,并与常规PID和模糊自适应PID控制器作对比。
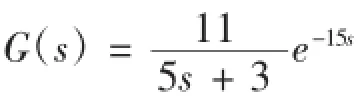
根据实际工况,控制对象吸收塔浆液PH值可近似为一个一阶滞后惯性环节:
常规PID控制器试凑出最理想一组控制参数:
Kp=0.099,Ki=0.01,Kd=0.0005
系统仿真工具为Matlab/Simulink环境,仿真步长采用0.001 s固定步长,仿真算法采用四阶龙格-库塔算法。
3.1阶跃响应
浆液PH值为5.4~5.5时,脱硫效果最为理想,设定阶跃终值为5.0,仿真结果如图3所示,鲁棒自适应PID控制器在超调量和调节时间上明显都优于其他两种控制算法。

图3 控制器阶跃响应对比
3.2抗扰性能
系统运行时,不可避免地受到外界干扰,这就要求控制器有较强抗干扰能力,防止系统振荡。为了验证鲁棒自适应PID控制器的抗干扰能力,在t=40 s时加入扰动,同时对比常规PID控制器和模糊自适应PID控制器的抗干扰能力。
控制器抗干扰性能对比如图4所示,鲁棒自适应控制器在4 s内将系统稳定;模糊自适应PID控制器超调量最小,但系统出现了振荡;常规PID超调最大,振荡的周期和幅值最大。
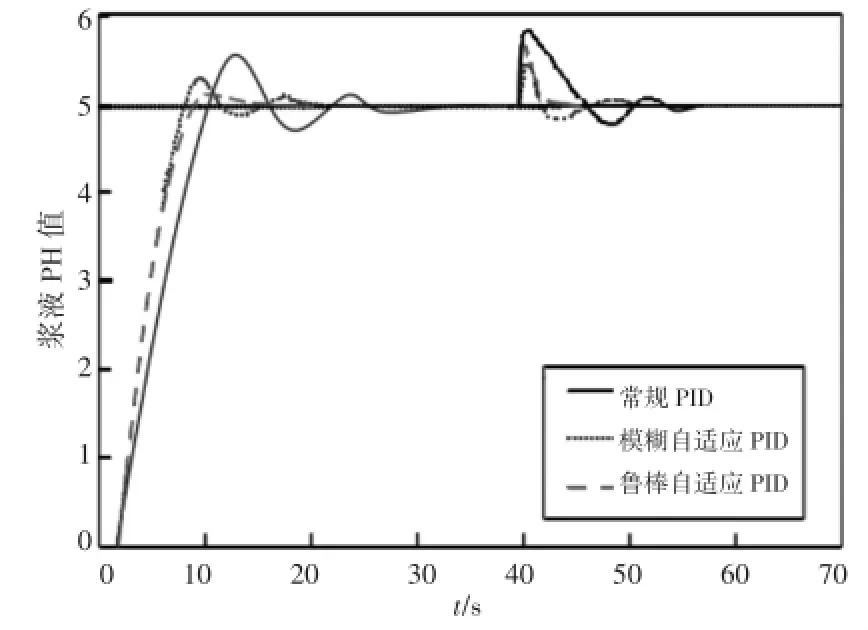
图4 控制器抗干扰性能对比
4 结束语
基于小脑神经网络的自适应控制器利用小脑神经的动态处理问题能力来估计吸收塔浆液PH值控制系统的广义逆模型,能很好地处理系统的非线性问题。小脑神经网络PID控制器兼有PID和小脑神经网络特性,鲁棒性强,抗干扰能力强,结构较简单,具有工程实用价值。
[1]中国环境保护产业协会脱硫脱硝委员会.我国脱硫脱硝行业2012年发展综述[J].中国环保产业,2013,(7):8-20.
[2]王淇,赵霞.DCS系统在火电厂烟气脱硫控制系统的实现[J].自动化与仪表,2008,23(2):36-39.
[3]王彬.石灰石-石膏湿法烟气脱硫系统优化[D].济南:山东大学,2010.
[4]曾庭华.湿法脱硫系统对锅炉尾部烟道和烟囱影响的研究[J].电力建设,2002,23(4):19-23.
[5]Edmund S.Baronll.Clean Coal Project Nears Commercial Operation[J].PowerBngg,1995,99(2):31-36.
[6]Monfared Mohammad,Daryani Abbas Molavi,Abedi Mehrdad,Online tuning of genetic based PID controller in LFC systems using RBF neural network and VSTLF technique[J].Neural Network World,2008,18(4):309-322.
[7]J.S.Albus,A New Approach to Manipulator Control:the Cerebellar Model Articulation Controller(CMAC)[J].Trans,ASME,J.Dyn.Syst.Meas.Contro.1975,97,(3):220-227.
PH Control of Absorption Tower Slurry Based on Neural Network
LEI Tao-feng
(Datang Huxian Second Thermal Power Plant,Xi’an Shaanxi 710065,China)
An adaptive PID controller based cerebellar model articulation(CMAC)controller is presented for improve adaptive ability of absorber slurry PH control system against the influence of nonlinear and disturbing. Considering the sensitive of differential of high order to noise,a CMAC controller only containing proportional integral differential is deriving,which also has the characteristic of PID.The simulation results of step response and capacity of resisting disturbance demonstrate the effectiveness of robust adaptive PID controller by contrast with normal PID controller and fuzzy adaptive PID controller.
absorber slurry PH;CMAC;adaptive;PID
TP273
A
1672-545X(2016)10-0021-04
2016-07-11
雷涛锋(1984-),男,陕西西安人,本科,助理工程师,从事脱硫控制研究。