夹紧力自适应三爪卡盘机械传动系统设计
2016-12-13梁建和陈伟珍梁小流
梁建和,陈伟珍,梁小流
(广西水利电力职业技术学院,广西南宁530023)
夹紧力自适应三爪卡盘机械传动系统设计
梁建和,陈伟珍,梁小流
(广西水利电力职业技术学院,广西南宁530023)
研究在现有普通三爪卡盘基础上进行经济型自动化改造,已成为再制造工程中机床数控化改造的热点内容。通过对普通三爪卡盘自动化改造过程中经常遇到的是否保留端面螺纹传动副、电机及减速器如何布置、如何将电机及减速器与卡盘有效隔离等问题作方案选择分析,详细分析论证所设计夹紧装置的可靠性,完成端面螺纹传动副实时调整夹紧力所需动力的计算及传动系统设计计算。
机床改造;夹紧力;自动卡盘
在普通车床的数控化改造中,主要是对进给系统和刀架进行改造,对卡盘的改造很少有人去关心。但是,众所周知,车削加工的工件装夹所花时间也不少;另外,不能实现工件的自动化装夹,必然会大大影响车床的自动化程度,制约普通机床数控化改造的应用。因此,把卡盘的改造列入普通车床数控化改造的范畴是很有必要的。然而,简单地把现有的自动卡盘拿来配上,将增加成本使改造失去经济性,因而降低市场竞争力,最终限制其推广应用。于是,研究在现有普通三爪卡盘基础上进行经济型自动化改造,已成为再制造工程中机床数控化改造的热点内容。
为此,启动了“夹紧力自适应三爪卡盘研制”项目。该项目的夹紧力自适应专家系统和电控系统已另文介绍,这里只介绍其机械系统的设计。
1 三爪卡盘本体的设计制作方案选择
(1)是采用现有人工操作卡盘改造还是全部重新设计制作。现有人工操作卡盘经过长时间使用改进,已在可靠性、耐久性、经济性、结构合理性等方面得到验证,因此,采用现有人工操作卡盘加以改造,必然减少很多麻烦,缩短研制周期。但是,这样一来,把卡盘夹紧的动力直接布置在卡盘内部是非常困难的。因此,本项目采用改造现有人工操作卡盘,夹紧的动力布置在卡盘外部的方案。
(2)是输入直线运动还是输入旋转运动。夹紧动力从外部传输到卡盘内有输入直线运动和输入旋转运动两种办法,输入直线运动,是在卡盘内腔通过锥面或四杆机构等机械装置把运动的方向改变九十度,实现轴向的移动变成夹爪的径向移动。这个方案需要把电机的旋转运动转换为直线运动,无论是采用齿轮齿条还是采用气压传动或者液压传动,都会使机械传动系统复杂化,建议优先考虑保留端面螺纹传动副直接输入旋转运动的方案。
(3)电机及减速器布置。直接把电机及减速器布置在车床主轴的后端是很困难的,通常是把电机及减速器布置在远离车床主轴后端的床头箱顶或车床地座上,再通过带传动把动力传到车床主轴后端,然后穿过主轴内孔把动力传到卡盘内腔。由于本项目的卡盘是为提高数控车床的效率而设计的,又因为数控车床的数控系统大多数已经占用床头箱顶的空间,因此,优先考虑把电机及减速器布置在车床底座上的方案。
(4)动力隔离方案。要使夹紧力能够自适应,除需要根据工件情况确定和控制夹紧力的大小外,还需要在加工过程中实时监控夹紧力的变化,必要时进行实时调整夹紧力。这样一来,如果不将动力有效隔离,电机就会被卡盘带动反转而降低电机及减速器的寿命。因此,必须将电机及减速器与卡盘有效隔离。隔离的方法主要有电磁离合器法和超越离合器法两种。电磁离合器法的优点是工作可靠,其缺点是结构复杂并需要配备专门的控制装置。故本项目优先考虑采用超越离合器法。
2 夹紧装置可靠性分析
采用超越离合器隔离动力,有一个令人担忧的问题,这就是是否会因为传动装置的惯性和摩擦阻力的存在导致夹紧力自动减少而松开工件。为解决这个问题,有必要对夹紧机构有无可能自动松爪的问题作详细分析。
(1)夹紧或放松的实现。采用现有人工操作三爪卡盘改造成自动卡盘的工作原理如图1所示。车床主轴2通过驱动法兰1带动卡盘体7旋转,从而带动夹爪10及工件实现工作旋转。控制电机的动力用现有人工操作三爪卡盘改造成自动卡盘的工作原理如图1所示。车床主轴2通过驱动法兰1带动卡盘体7旋转,从而带动夹爪10及工件实现工作旋转。控制电机的动力通过减速器和带传动(图中未画出),驱动传动轴3,传动轴3通过键传动驱动端齿盘6,在端齿盘6的前端面开有与夹爪10相啮合的端面矩形螺纹,这就形成端面矩形螺纹传动副,其功能是把端齿盘6的旋转运动改变为夹爪10的径向移动。由此,达到控制电机的正反转使端齿盘随之正反转,通过端面矩形螺纹传动副驱动夹爪10径向地往内或往外移动,实现对工件的夹紧或放松的控制。
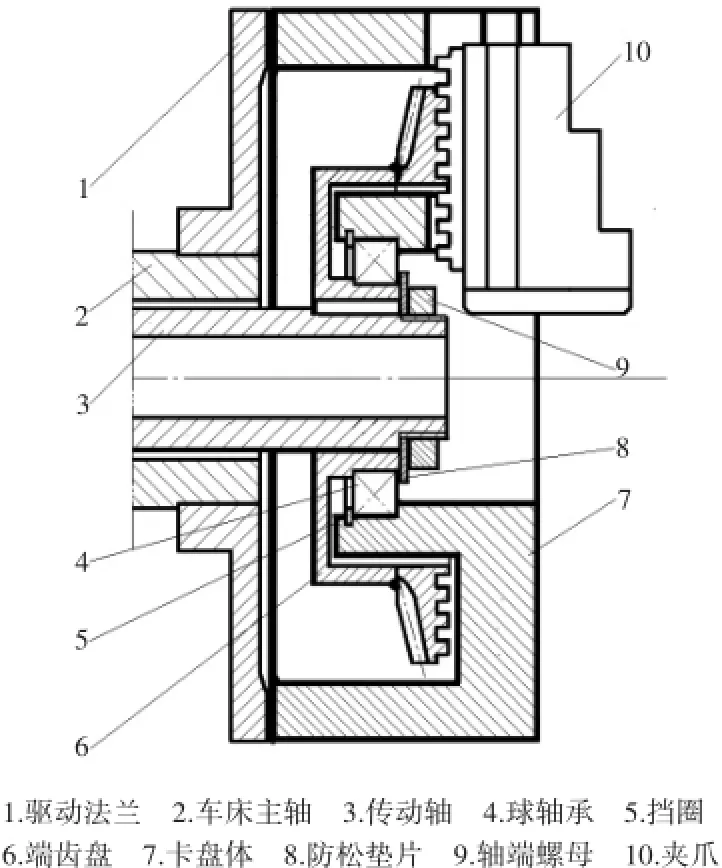
图1 自动卡盘的工作原理
(2)逆传动的分析。这里的逆传动是就指从卡盘体7驱动夹爪10的转动而言的,是否有可能出现夹爪10的主动径向移动使端齿盘6及传动轴3旋转的情况,如果出现这种情况就会因切削工作的影响产生自动松爪,这是绝对不允许的。是否有自动松爪的可能,关键是在夹爪10作为主动件转动的时候有没有可能同时发生径向移动现象。这里实际上归结为端面矩形螺纹传动副是否可以逆传、自锁是否可靠的问题。
端面矩形螺纹副的受力情况见图2,为了便于分析,这里采用单齿端面矩形螺纹。拿夹爪作为研究对象,假定作用在夹爪(螺母)上的夹紧力F集中作用于中径的圆周上的一点(啮合点),反力N垂直于啮合点切线,切线的倾斜度称为螺旋升角。为清晰起见,把受力分析图移到外部画出,如图3所示。相当于滑块(夹爪螺母)在斜面上,斜面倾角λ为螺纹升角。当夹爪螺母有松退移动时,则相当于滑块在载荷(夹紧力)F作用下沿斜面下滑,则摩擦力摩擦力Ff向上。作用于夹爪螺母的力有:外载荷F、螺纹斜面法向反力N和摩擦力Ff=fN(f为摩擦系数)。法向反力N和摩擦力Ff的合力R是在夹紧力F作用下端齿盘对夹爪螺母的总反力,Ft是R的水平力分力,R和N的夹角称为摩擦角,用ρ表示。这时,总反力R和外载荷F的夹角为(λ-ρ)。由图3(b)所示的力封闭三角形可知:

式中:Ft为驱动夹爪螺母转动的圆周力;F为驱动螺母移动的径向力;λ为螺纹升角,λ=arctan(S/πd),S为螺纹传动的螺距,d为螺纹直径;ρ为螺纹传动的摩擦角,ρ=arctan f,f为摩擦系数。
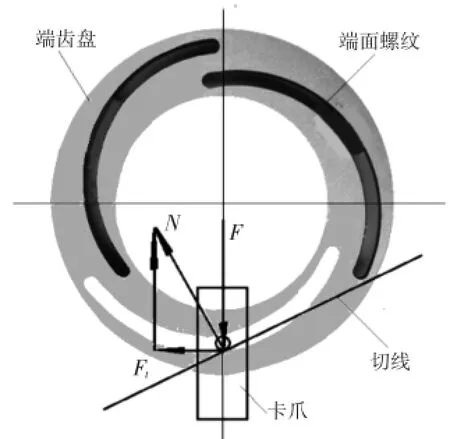
图2 端面矩形螺纹受力图
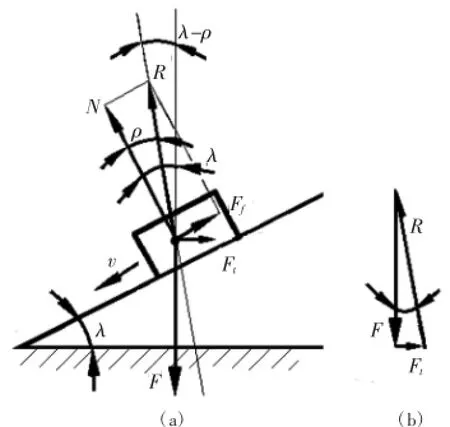
图3 螺纹传动副松退受力分析
由此可见,若λ<ρ,则Ft为负值,这就表明只要满足条件:(λ<ρ),则无论轴向载荷F有多大,滑块(相当于夹爪螺母)都不会在其作用下自行下滑(相当于夹爪螺母径向外移松退),这种情况称为自锁。
金属之间的摩擦系数最低也有f=0.07,即有最小摩擦角ρ为4°.又因:
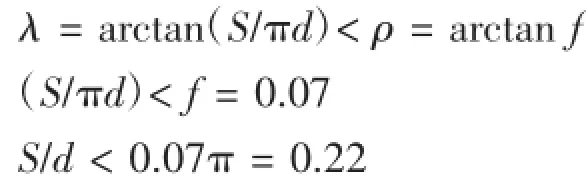
这就是金属螺纹的螺距与直径的自锁条件。
本项目采用的卡盘的端面螺纹S=8、d=100~150,

完全满足S/d<0.22的自锁条件。
3 动力计算
3.1端齿盘驱动力矩Mp与夹紧力的关系
首先要作螺纹传动副拧紧受力分析。相似于螺纹传动副松退受力分析,只是因为夹紧是夹爪往里移动,相当于滑块往上滑,故摩擦力的方向是往上的。如图4所示。斜面倾角λ为螺纹升角。此时作用于螺母的力有:外载荷F、螺杆斜面法向反力N和摩擦力Ff=fN,法向反力N和摩擦力Ff的合力R,R的水平力分力Ft,R和N的夹角ρ称为摩擦角。这时总反力R和外载荷F的夹角为(λ+ρ)。由图4(b)所示的力封闭三角形可知

式中各符合含义同式(1),ρ为螺纹传动的摩擦角,这里取ρ=4°.又

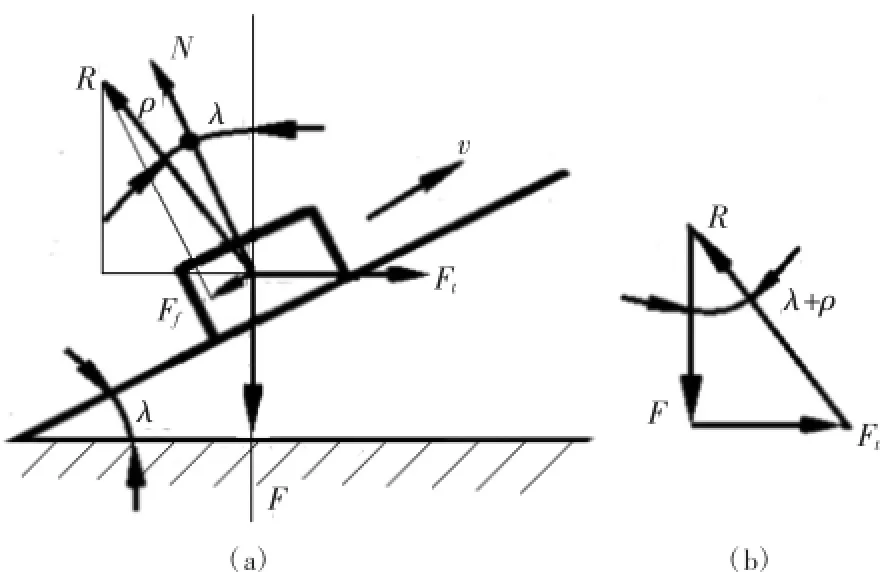
图4 螺纹传动副松退受力分析
对于端面矩形螺纹,外载荷F是径向力,也就是夹紧力,本项目采用SK-8普通三爪卡盘进行改造,最大夹紧力为36 kN;使夹爪螺母转动的力矩为

将d/2=125÷2=62.5,F=36 kN,ρ=4°,λ=1.17°
代入得

3.2传动比计算
设从电机到端齿盘的机械传动的带传动比为id、减速箱传动比为ix,于是有
Md≥Mp/(id×ix)id≥Mp÷(ix×Md)
根据位置安装空间和市场供应情况,驱动电机采用SM 110-060-30LFB,额定力矩为Md=6 Nm;采用涡轮蜗杆减速箱的传动比为1:20.代入得
id≥6÷(20×205)=1.46
取带传动的传动比为id=2.
4 结束语
本设计有如下特点:
(1)保留了车床主轴中心通孔,便于实现自动送料;
(2)将车床主轴的工作转动隔离于卡盘之后,避免了带传动和减速箱的不必要旋转,大大提高了传动装置的寿命;
(3)带传动和涡轮蜗杆减速箱,都是市场上可以买到的成熟零部件,具有简单、可靠、经济的优点。
[1]杨湘洪.三爪卡盘的静力改造[J].机械工程师,2003,(12):73-74.
[2]刘棣中.普通三爪卡盘改造为电动卡盘[J].装备制造技术,2007,(02):84-86.
The Design of Clamping Force Adaptive Three Jaw Chuck Mechanical Transmission System
LIANG Jian-he,CHEN Wei-zhen,LIANG Xiao-liu
(Guangxi Vocatinal College of Water Resources and Electric Power,Nanning Guangxi 530023,China)
The research of automation eform of economy based on the existing common three jaw chuck,it has become a hot issue of CNC machine tools in the process of remanufacturing engineering.Through the automation of process often encountered in chuck with three jaws whether to retain the end thread gear,electric machine and reducer and how to plan,how to make analysis and selection scheme of motor and reducer and chuck effective isolation,reliability design of clamping device detailed analysis of the design calculation of complete end thread transmission real-time adjustment of clamping force required by the power and transmission system.
machine tool;clamping force;automatic chuck
TH122
A
1672-545X(2016)10-0005-03
2016-07-23
广西教育厅科研《夹紧力自适应数控三爪卡盘的研制》项目资助(项目编号:200911MS318)
梁建和(1955-),男,广西南宁人,本科,教授,研究方向:机电一体化技术。
