干涉合成孔径声纳图像配准中插值算法比较研究*
2016-12-13马梦博唐劲松钟何平
马梦博 唐劲松 钟何平 黄 攀
(海军工程大学电子工程学院 武汉 430033)
干涉合成孔径声纳图像配准中插值算法比较研究*
马梦博 唐劲松 钟何平 黄 攀
(海军工程大学电子工程学院 武汉 430033)
干涉合成孔径声纳数据处理中,图像配准是关键步骤之一,往往制约整个数据处理自动化的实现。论文介绍了配准的一般步骤,并分析了输入影像重采样的特点。重点研究了常用的四种插值算法:lagrange插值、sinc插值、三次样条插值和立方卷积插值,对四种算法的原理做了详细介绍。并使用海试中得到的数据对四种算法进行实验,分析了四种算法的性能,结果表明立方卷积插值略优于其他算法。
插值算法; 图像配准;合成孔径声纳
Class Number TN958
1 引言
干涉合成孔径声纳[1](Interferometric Synthetic Aperture Sonar,InSAS)是一种新型高分辨率三维成像声纳,其原理是用空间上平行放置的两个接收基阵来获得两幅复数影像[2~3],利用两幅影像形成干涉条纹图,提取DEM后形成三维景观图。在InSAS数据处理中,图像配准是关键技术之一,为了获得高质量的数字高程模型,理论上,配准精度需要达到子像素级(1/10像素)。在图像配准过程中需要对输入影像进行重采样,而重采样实际上会带来低通滤波的效果[4],选择不同插值方法对图像配准效果以及数据处理自动化的实现都有一定影响。
论文利用海上测试数据,分析了四种插值算法,并对四种算法的运算效率以及插值效果进行了比较。
2 InSAS图像配准
在InSAS图像配准中,从两个接收基阵中采样得到两幅复数影像,分别定义为参考影像与输入影像,其大小都为Nr×Na,Nr为距离向采样点数,Na为方位向采样点数。输入影像相对于参考影像进行图像配准。首先在参考影像和输入影像之间找到足够多的一一对应的点对(即同名点),由这些同名点作为控制点确定影像之间的相对几何变换模型,然后根据变换模型将输入影像进行重新采样[4]。
由于两个接收基阵的运行轨迹几乎完全平行,成像差异主要表现在距离向上[5~6],所以输入影像重采样过程中是沿着距离向的插值。
3 输入影像重采样的插值算法
常用的插值算法有lagrange插值、sinc插值、三次样条插值和四点三次插值[7],本文就这四种方法进行研究。
3.1 lagrange插值
lagrange插值法[8~9]的思想就是利用y(xk)的n个值来近似计算y(x)在X处的值。线性插值、抛物插值都属于lagrange插值。其插值多项式可以表示为

特例,令n=1,即得两点插值公式
即
这是一个线性函数,用线性函数L1(x)近似代替函数y(x),故两点插值又称线性插值。
3.2 sinc插值
设有函数g(x),采样定理表明,在满足以下两个条件时,可以从g(x)的等间隔离散样本中无失真地重建信号:
1) 信号带限的,即其最高频率有界。实际上对任何物理系统进行的测量都是带限的。
2) 采样满足Nyquist采样率[10]。实信号的采样率必须高于信号最高频率的两倍。复信号的采样率必须高于信号带宽。
在满足以上条件时,就可以通过卷积重建初始信号。插值信号为
即为所有输入样本的加权叠加。
为精确计算某一点上的g(x),卷积核需要覆盖无限多个点。实际上这是无法做到的,而且使用大量数据点会使插值非常耗时,但精度提高却不高。计算表面,核值随着与X的间隔增大而降低,这意味着可以在不过度损失精度的同时对卷积进行截断。
在InSAS图像配准中,兼于精度和运算量的要求,同时便于和其他插值算法作比较,论文中使用4点sinc插值进行实验。
3.3 三次样条插值
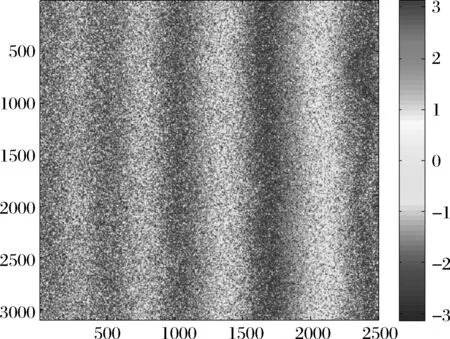
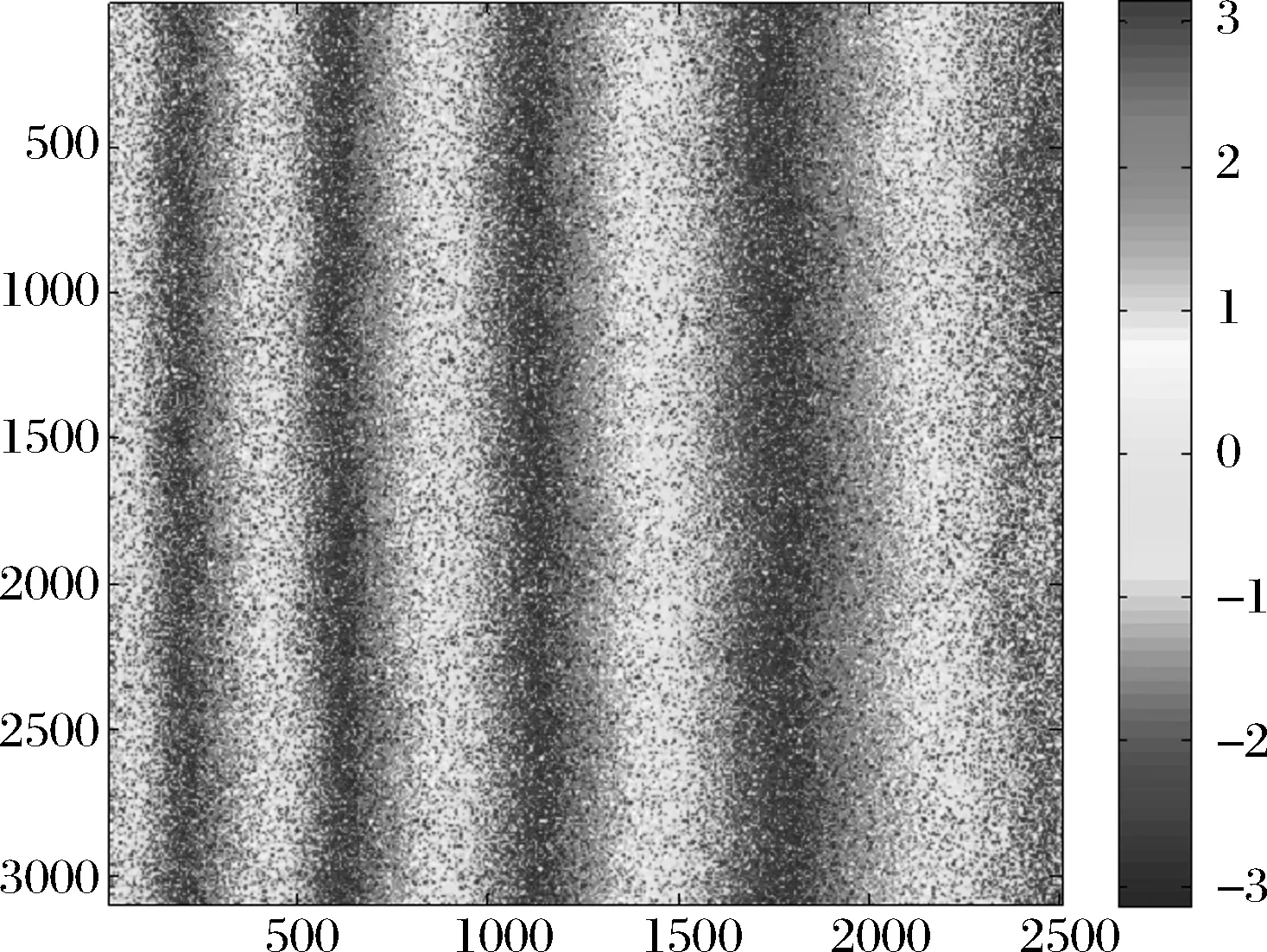
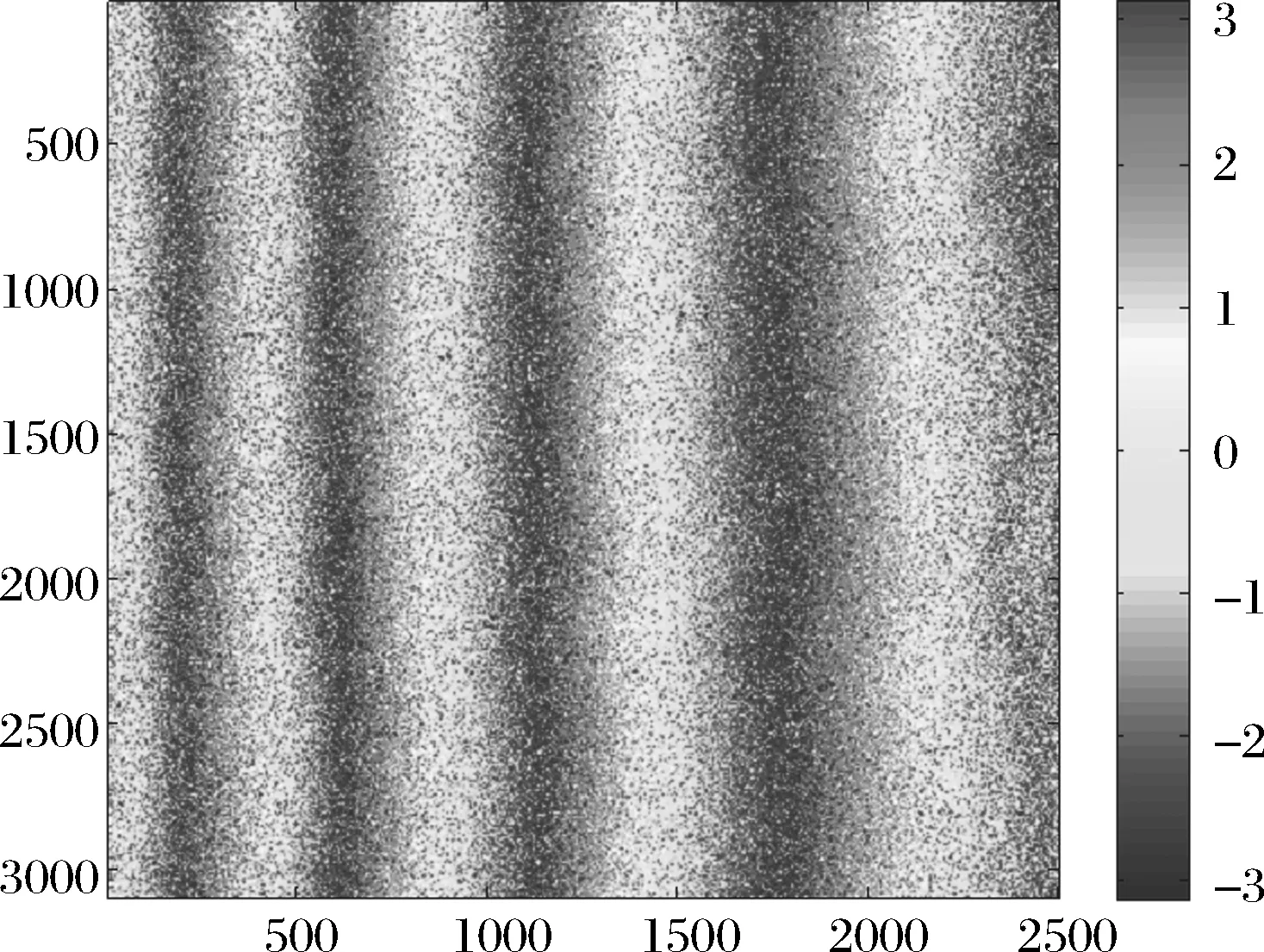
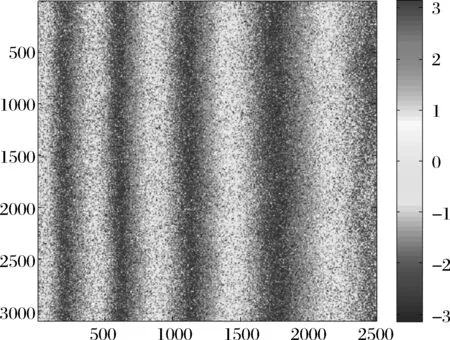
对于给定n+1个不同节点x0,x1,…,xn及函数值y0,y1,…,yn,其中a=x0 1) S(x)在[a,b]上二阶导数连续; 2) S(xk)=yk(k=0,1,…,n); 3) 每个子区间[xk,xk+1]上S(x)是不高于三次的多项式Sk(x),(k=0,1,…,n)。 由此可见,三次样条插值函数就是全部通过样点的二阶连续可微的分段三次多项式函数。但是,S(x)在[a,b]上不一定是一个三次多项式函数,设 Sk(x)=akx3+bkx2+ckx+dk 其中ak,bk,ck,dk待定,并要使它满足: S(xk)=yk,S(xk-0)=S(xk+0), S′(xk-0)=S′(xk+0), S″(xk-0)=S″(xk+0)(k=1,2,…,n) 以上各式共给出了n+3(n-2)=4n-6个条件,需要待定4(n-1)个系数,因此要唯一确定三次插值函数,还要附加2个边界条件。通常由实际问题对三次样条插值在端点的状态要求给出。常用边界的条件有以下三类。 第二类边界条件:给定端点处的二阶导数值,S″(x1)=y″1,S″(xn)=y″n。特殊情况,y″1=y″n=0,称为自然边界条件。 第三类边界条件是周期性条件,如果y=f(x)是以b-a为周期的函数,于是S(x)在端点处满足条件S′(x1+0)=S′(xn-0),S″(x1+0)=S″(xn-0)。 3.4 四点立方卷积插值 采样前的函数用f(x)表示,插值后函数用u(x)表示,xk是离散的采样点,那么一定要满足:u(xk)=f(xk)。对于采样间隔保持不变的情况,插值函数定义如下 其中,h表示采样间隔,i表示插值核函数,ck的值与采样数据有关,它的选择要保证在采样点上插值所得的结果和原来的值相等。 一般情况下,四点立方卷积插值α=-1能够满足干涉处理的需要。 以某次海试中得到的数据为例,参考影像和输入影像都是3100×2500的复图像,运用Matlab分别对四种插值算法进行实验。 两幅精确配准的复数影像经共轭相乘形成干涉,其相位差分量即为干涉条纹图。不同算法的干涉条纹图如图1~6所示。 图1 未配准前干涉条纹图 图2 干涉条纹图—线性插值 图3 干涉条纹图—lagrange插值 图4 干涉条纹图—sinc插值 图5 干涉条纹图—三次样条插值 图6 干涉条纹图—四点立方卷积插值 复数影像之间通常用相干性来衡量影像之间的相似程度和干涉条纹图的质量。实际计算时,同样地假设在N×M的估值区域内随机过程是平稳历经的,即在适当大小的N×M区域中,用样本的平均值来估计,有 其中u1(n,m)表示参考影像上的点,u2(n,m)表示输入影像上的点。 根据前面给出的各种插值算法,取估值区域为3×3的数据计算相干系数,并计算出整幅图像的相干系数的均值、方差以及干涉条纹图的残点数,从而对不同插值算法进行了比较,结果如表1所示。 表1 插值效果比较 在InSAS数据处理中,图像配准的效果对最终图像的精度有直接影响,而算法的运行效率也直接影响数据处理的实时性能,所以实际算法应综合考虑这两方面的因素。由于线性插值算法简单,运算量少,其耗时也是最少的,但插值效果明显不如其他算法。高阶lagrange插值、sinc插值、三次样条插值和四点立方卷积插值由于算法复杂度较高,其耗时也相对较长,插值效果也较好。在四种算法中,四点立方卷积插值效果是最好的,算法的效率也较高,四点立方卷积插值算法略优于其他算法。 [1] 刘经南,阳凡林,赵建虎,等.浅析合成孔径声纳与干涉合成孔径声纳[J].海洋测绘.2003,23(2):1-4. [2] Per Espen Hagen,Roy E.Hansen,Kenneth Gade.Interferometric synthetic aperture sonar for AUV based mine hunting: The sensor project[C]//Proceedings of Unmanned Systems,2001. [3] 刘兴华.干涉合成孔径声纳系统设计和成像算法研究[D].北京:中国科学院声学研究所,2008. [4] 廖明生,林珲.雷达干涉测量[M].北京:测绘出版社,2003:49-52. [5] 张友文,田坦,孙大军.干涉合成孔径声纳复图像配准[J].哈尔滨工程大学学报,2005,26(1):75-79. [6] 张贵平,贾鑫,尹灿斌,等.SAR成像处理中插值算法的比较研究[J].理论与方法,2008,27(8):9-11. [7] 王超,张红,刘智.星载合成孔径雷达干涉测量[M].北京:科学出版社,2002:76-78. [8] 何汉林.数值分析[M].北京:科学出版社,2013:135-139. [9] 封建湖,车刚明,聂玉峰.数值分析原理[M].北京:科学出版社,2001:49-53. [10] 禹卫东,吴淑梅.距离—多普勒方法中的几种插值算法比较[J].电子与信息学报,2001,23(3):308-311. Interpolation Algorithm for Image Registration in Interferometric Synthetic Aperture Sonar MA Mengbo TANG Jinsong ZHONG Heping HUANG Pan (College of Electronic Engineering, Naval University of Engineering, Wuhan 430033) Image registration is one of the key steps in data processing of Interferometric Synthetic Aperture Sonar, restricting the realization of the automation of the whole data processing. A general procedure for registration is introduced in this paper, and the characteristics of the resampling of the input image is also analyzed in this paper. This paper studies four commonly used interpolation algorithms, including lagrange interpolation , sinc interpolation , cubic spline interpolation and cubic convolution interpolation, and introduces basic principles of the four algorithms. The experiment of the four algorithms is carried out, using the data obtained from the sea trial. The paper analyzes the performance of the four algorithms, and the result shows that cubic convolution interpolation algorithm is better than other aogorithms. interpolation algorithm, image registration, synthetic aperture sonar 2016年5月6日, 2016年6月23日 国家“863”计划(编号:2014AA093405)资助。 马梦博,男,硕士研究生,研究方向:水声信号处理技术与应用。 TN958 10.3969/j.issn.1672-9730.2016.11.0104 插值算法的比较



5 结语
