具有执行器饱和不确定线性系统的控制
2016-12-12董秋阳
景 丽, 董秋阳
(沈阳师范大学 数学与系统科学学院, 沈阳 110034)
具有执行器饱和不确定线性系统的控制
景 丽, 董秋阳
(沈阳师范大学 数学与系统科学学院, 沈阳 110034)
主要研究了一类具有执行器饱和不确定线性系统的控制问题,探索当执行器饱和与不确定项同时存在时,系统渐近稳定的条件,并证明所得结论。首先,根据扇形区域法将饱和函数的饱和项表示出来。同时,根据Lyapunov稳定性理论,给出具有执行器饱和的线性系统渐近稳定的充分条件,并设计相应的状态反馈控制器,使系统渐近稳定。然后,借助椭球体参考集,进行系统吸引域大小的估计。为了便于使用Matlab软件进行求解,将上述系统渐近稳定的充分条件转化为线性矩阵不等式的形式,进而利用LMI工具箱进行求解,得到相应数据。最后,给出仿真算例,证明了结论是有效可行的。
连续系统; 执行器饱和; 不确定; 线性矩阵不等式
0 引 言
饱和在工业过程和实际生活中是十分常见的。其中,执行器饱和更是影响着绝大多数系统。而系统包含的不确定性,也极大地影响着系统的稳定。因此,本文针对具有执行器饱和不确定线性系统的控制问题进行研究是十分必要的。饱和系统是在1969年由A.T.Fuller首次提出的,他提出如果输入饱和系统的积分器长度大于或等于2,不能使线性饱和系统全局稳定。对于饱和系统,其研究成果是显著的,如文献[1-5]等。对于执行器饱和系统的研究,其重点在于如何处理饱和项。文献[6]研究执行器饱和系统,运用扇形区域法对饱和项进行了适当处理,从而得到了执行器饱和系统的稳定性条件。文献[7]首次运用凸组合方法对饱和项进行处理。文献[8]提出了一种“组合Lyapunov函数”法。文献[9-10]主要运用Finsler’s引理和Lyapunov函数法。应用不同方法,以上文献均实现了对饱和项的处理,得到了系统稳定的条件。
目前,国内外学者对执行器饱和系统的研究多是基于确定性线性系统上,其研究成果仍然具有很强的保守性,例如文献[11-12]都是研究执行器饱和系统的稳定问题,并没有研究当系统带有不确定项时,系统想要达到稳定所需要的条件。本文则研究在执行器饱和的基础上,系统各参数均含有不确定项的情况。另外饱和项的处理,控制器的设计等方面均有良好的突破。
1 问题描述
考虑不确定线性饱和系统:

(1)
其中:x∈Rn为系统状态向量;u∈Rm为控制输入向量;A、B为适当维数的常矩阵;ΔA、ΔB为相应维数的不确定矩阵;且饱和非线性函数sat(·)定义如下:
sat(u)=[sat(u1),sat(u2),…,sat(um)]T
其中δ>0。
令ΔA=D1EF1,ΔB=D2EF2,其中D1,D2,F1,F2为已知适维矩阵。
引入状态反馈控制律:

(2)
其中η∈Rn×1,则式(1)的闭环系统:

(A+D1EF1)x+(B+D2EF2)[Kx+ηsat(x)] =
(3)
本文的研究目的是设计适当状态反馈控制器,使系统渐近稳定。
下面给出进行本文研究需要的相关定义、定理等。
定义2 椭球集合[13]:P>0,P∈Rn×n,ρ>0为标量,定义椭球体
定义3 吸引域[13]:假设系统的初始点x(0)=x0∈Rn,系统的解定义为φ(t,x0),因此它的吸引域是
引理1[14]给定矩阵A、L、E、F, 若FTF≤I,则有以下不等式成立
其中:α>0,P>0.
1) S<0
引理3[15]A,D,E和F为适当维数的实矩阵,其中A是对称的,A+DFE+ETFTDT<0,对所有满足FTF≤I的矩阵成立,当且仅当存在一个常数ε>0,使得A+εDDT+ε-1ETE<0。
2 不确定执行器饱和系统的控制及吸引域估计
2.1 不确定执行器饱和系统的控制
定理1 对于不确定饱和线性系统(1),在控制器(2)作用下,其中η∈Rn×1,若存在矩阵Q∈Rm×n以及正定矩阵N>0满足不等式
则不确定饱和线性系统(1)是原点局部渐近稳定的。
证明 对于式(2),由范数的三角不等式性质可得
令‖Kx‖∞<1-‖η‖∞,ρ1=1-‖η‖∞, 则
假设V=xTPx是系统(3)的李雅普诺夫函数,则其沿着该系统对时间的导数为
(4)
其中
(5)
式(5)应用引理1,可得
(6)
因此,式(4)可以转换为

(7)

由引理3,对上式进一步整理,可得
(8)
在式(8)两端同乘P-1,得
(9)
令N=P-1,Q=KP-1,将N,Q代入式(9)得
由引理2得到

2.2 吸引域估计
根据前一部分给出的系统稳定条件,通过椭球体参考集进行吸引域的估计,进而获得最大的吸引域,从而找出系统渐近稳定的最大区域。
此部分的研究应满足以下几个式子:
(10)
(11)
(12)
其中式(10)是上文求得的系统稳定的条件,式(11)将区域限制在椭球体内,式(12)表示椭球包含在多面体内。
式(11)等价于
(13)
式(12)等价于
(14)
于是优化问题可以转化为
(15)
其中γ=σ-2。
利用LMI工具箱即可求出式(15)的解。
3 仿真算例
对于不确定饱和线性系统(1)

设系统状态矩阵、输入矩阵为
另外设
利用Matlab的LMI工具箱求解不等式组(15)得到结果:
γ=1.242 4

K=[-0.468 4;-0.640 1]
其中K是控制器增益矩阵。
系统初始状态选为:x=(2,0.5)T,则在上述状态反馈控制器作用下,系统渐近稳定,0.940 8x1x1+0.290 2x1x2+0.592 5x2x2=1。如图1、图2所示。
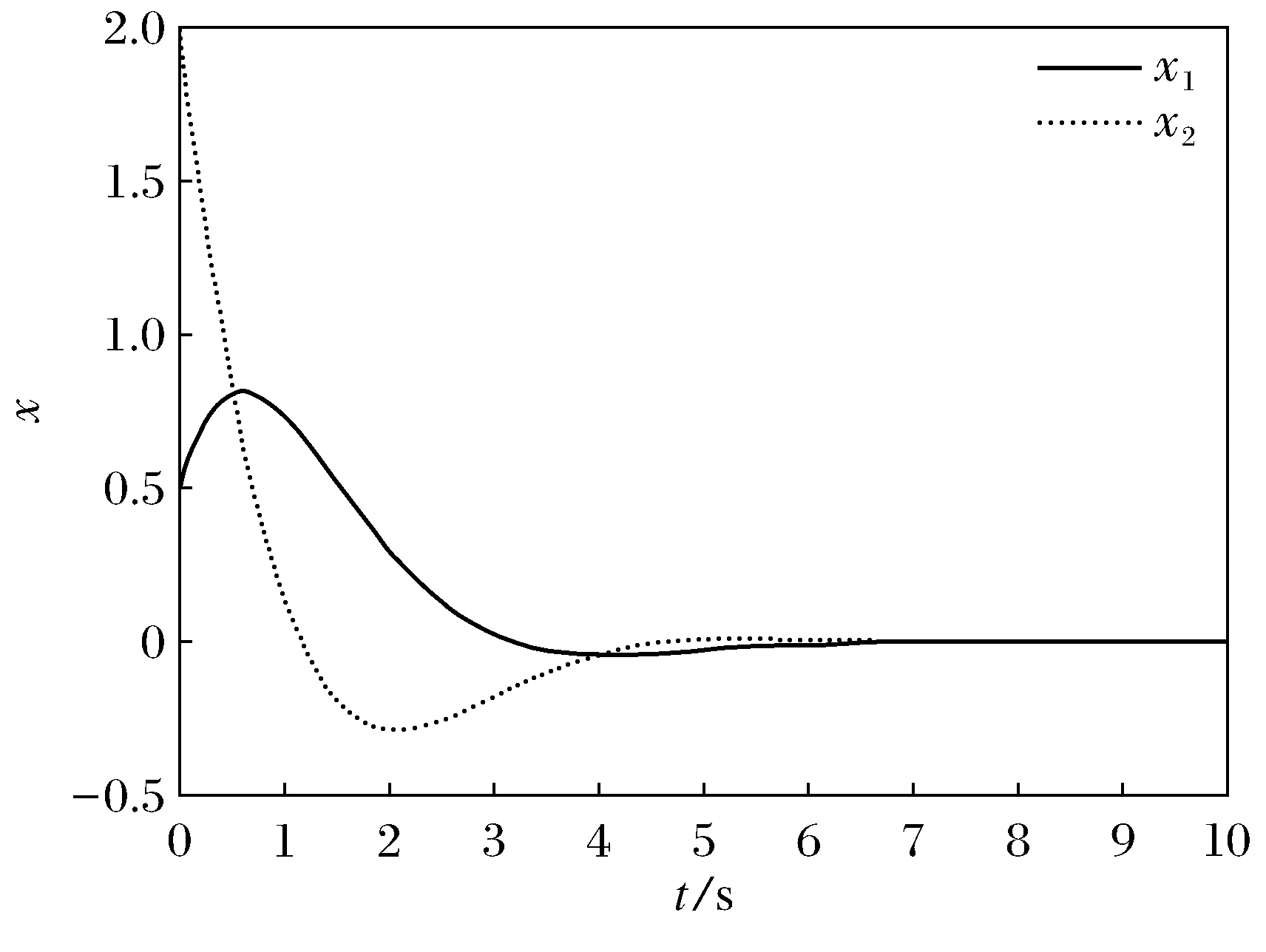
图1 系统状态轨迹图
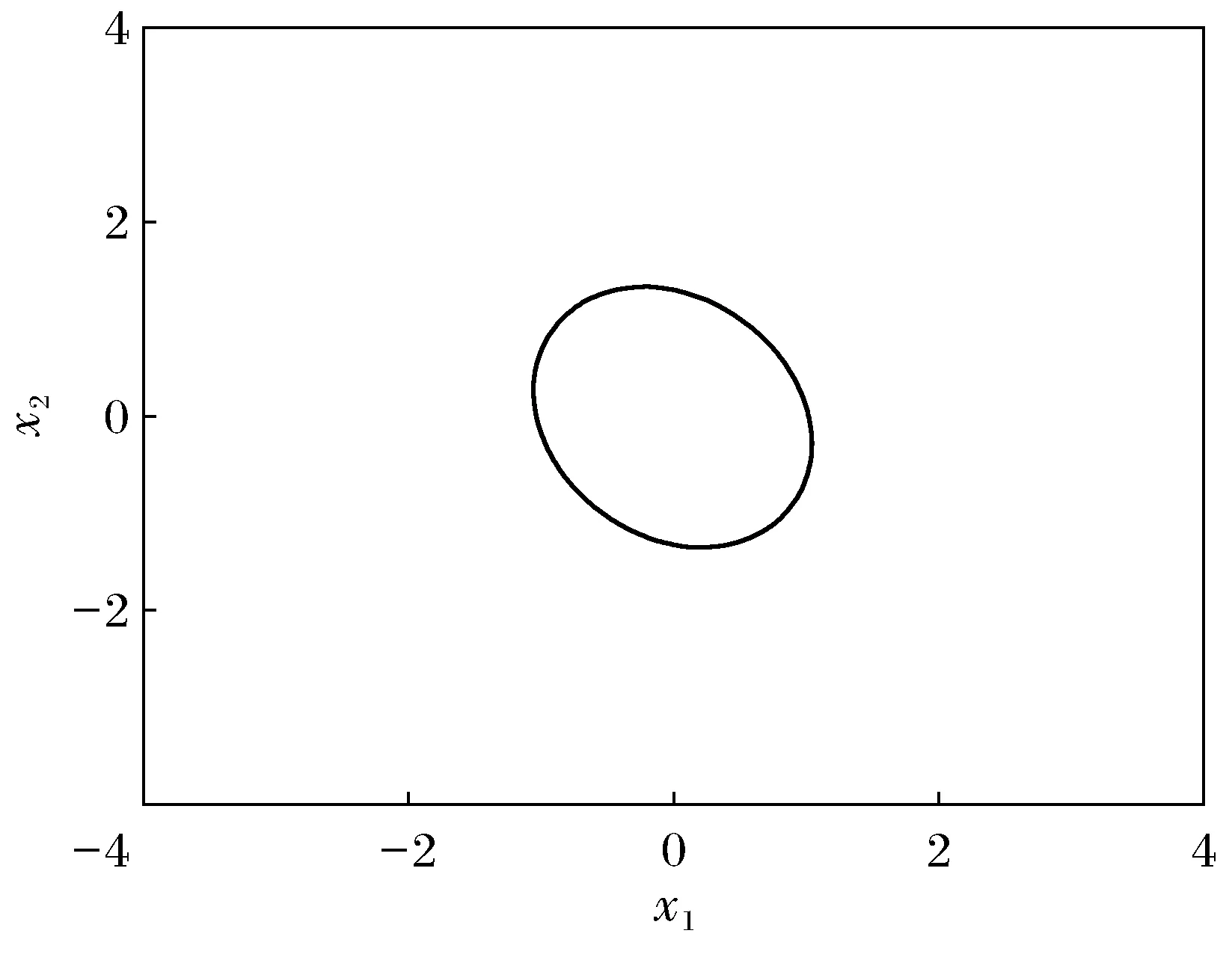
图2 系统吸引域图
4 结 论
本文研究了一类具有执行器饱和不确定线性系统的控制问题。通过查阅相关书籍与文献并根据国内外学者的诸多研究成果,了解到大多数对控制系统的研究都是针对执行器饱和系统进行的,而对于将执行器饱和与不确定性相结合的情况,到目前为止,国内外学者所进行的研究仍然较少。本文正是研究执行器饱和与不确定项同时存在时,要使系统达到稳定所需要满足的条件。因此,本文研究具有一定的创新性。首先,借助扇形区域法处理饱和项。然后,根据Lyapunov稳定性理论及相关引理,设计适当的状态反馈控制器,给出系统渐近稳定的条件。最后,通过仿真算例验证了结果的有效性和正确性。
[1]HOU Ling, ANTHONY N. Asymptotic stability of systems with saturation constraints[J]. IEEE Transaction on Automatic Control, 1998,43(8):1148-1154.
[2]F. Blanchini. Control of linear systems with regulation and input constraints[J]. Communications and Control Engineering, 2000,19(11):46-53.
[3]BERNSTEIN D S, MICHEL A N. A chronological bibliography on saturating actuators[J]. International Journal of Robust and Nonlinear Control, 1995,5(5):374-381.
[4]SABERI A, LIN Z, TEEL A R. Control of linear systems with saturating actuators[J]. IEEE Transaction on Automatic Control, 1996,41(3):368-378.
[5]FULLER A T. In-the-large stability of relay and saturating control systems with linear controllers[J]. International Journal of Control, 1969,10(4):457-480.
[6]HINDI H, BOYD S. Analysis of linear systems with saturation using convex optimization[C]. IEEE Control Systems Society,1998(1):903-908.
[7]HU T, LIN Z, CHEN B M. Analysis and design for discrete-time linear systems subject to actuator saturation[J].Systems and Control Letters, 2002,45(2):97-112.
[8]HU T, LIN Z. Control systems with actuator saturation[M]. Boston: Birkhauser, 2001,162(3):170-175.
[9]曹艳秋. 执行器饱和不确定离散控制系统的稳定性分析[D]. 哈尔滨:哈尔滨理工大学, 2012.
[10]杜鸿波. 执行器饱和线性控制系统的镇定[D]. 沈阳:沈阳师范大学, 2015.
[11]方敏. 执行器饱和控制研究[D]. 济南:山东大学, 2007.
[12]吕亮. 具有执行器饱和的控制系统分析与设计[D]. 上海:上海交通大学, 2010.
[13]周丽明. 饱和控制系统理论及应用研究[D].哈尔滨: 哈尔滨工业大学, 2007.
[14]SHAO Keyong. Study on the stability and control of uncertain systems[D]. Northeastern University, 2003.
[15]杨瑾,景丽. 不确定时滞状态饱和系统的稳定性分析与综合[J]. 沈阳师范大学学报(自然科学版), 2014,32(3):374-378.
[16]张嗣瀛,高立群. 现代控制理论[M]. 北京:清华大学出版社, 2005.
[17]俞立. 鲁棒控制线性矩阵不等式处理方法[M]. 北京:清华大学出版社, 2002.
[18]赵广磊,王竟成. 基于LMI的执行器饱和的切换系统稳定性研究[J]. 科技通报, 2010,26(5):692-695.
[19]朱发旺,黄腾云,刘和光. 基于饱和关联Lyapunov函数的饱和离散系统吸引域估计[J]. 江南大学学报(自然科学版), 2011,10(4):379-384.
[20]LI Xiaoyin. Study on optimization and control of switched nonlinear systems subject to actuator saturation[J]. Fuxin: Liaoning Technical University, 2012.
[21]ZUO Zhiqing, WANG Yijing. On enlarging the domain of attraction for linear systems subject to actuator saturation[J]. International Journal of General Systems, 2008,37(2):239-248.
[22]HU Tingshu, LIN Zongli. Exact characterization of invariant ellipsoids for linear systems with saturating actuators[J]. IEEE Transactions on Automatic Control, 2002,47(1):164-169.
[23]赵克友,魏爱荣. 执行器饱和线性系统的镇定性[C]. 沈阳:2005中国控制与决策学术年会, 2005:102-104.
[24]张象林,陈东彦. 连续线性状态饱和系统鲁棒稳定性分析[J]. 哈尔滨理工大学学报, 2012,17(2):31-35.
[25]SINGH V. Stability analysis of discrete-time systems in a state-space realization with state saturation nonlinearities: linear matrix inequality approach[J]. IEE Proceedings on Control Theory and Applications, 2005,152(1):9-12.
Control of uncertain linear systems with actuator saturation
JINGLi,DONGQiuyang
(College of Mathematics and Systems Science, Shenyang Normal University, Shenyang 110034, China)
In this paper, we study a class of uncertain linear systems with actuator saturation. We mainly explore the stability criterion of the system when actuator saturation and uncertainties exist at the same time, and prove the conclusion. Firstly, the study uses the sector region method to dispose saturation. At the same time, according to the Lyapunov stability theory, the study gets the stability criterion and designs the state feedback controller to make the system asymptotically stable. Secondly, with the help of ellipsoid
et, the study estimates the attraction domain size of the system. In order to use MATLAB toolbox, the study changes the stability criterion into linear matrix inequality, and gets the corresponding data. Finally, the study gives out a numerical example and it proves that the conclusion in this paper is effective and feasible.
continuous system; actuator saturation; uncertainly; linear matrix inequality
2016-10-02。
辽宁省教育厅科学研究一般项目(L2014435)。
景 丽(1967-),女,辽宁沈阳人,沈阳师范大学副教授,博士。
1673-5862(2016)04-0413-06
O436
A
10.3969/ j.issn.1673-5862.2016.04.007