基于ZJCORS的RTK三维水深测量技术在椒江航道监测中的应用研究
2016-12-08祁敏敏李志鹏
祁敏敏,陶 宇,李志鹏
(1.浙江省河海测绘院,浙江 杭州 310008;2.浙江省河口海岸重点实验室,浙江 杭州 310020)
基于ZJCORS的RTK三维水深测量技术在椒江航道监测中的应用研究
祁敏敏1,2,陶 宇1,李志鹏1
(1.浙江省河海测绘院,浙江 杭州 310008;2.浙江省河口海岸重点实验室,浙江 杭州 310020)
与验潮仪验潮、单基准站RTK三维水深测量对比,突出介绍基于ZJCORS的RTK三维水深测量作业模式的优点,并在椒江航道监测项目中,对验潮仪验潮和基于ZJCORS技术的RTK三维水深测量作业模式进行对比研究,探讨在浙江省沿海地区利用网络RTK技术实施三维水深测量作业的可行性,并得出相关结论,提出项目实施过程中应注意的问题。
验潮;RTK三维水深测量;ZJCORS;航道监测
1 问题的提出
目前水深测量中水位获取的方法主要有验潮仪验潮和RTK三维水深测量2种。验潮仪验潮的方法是在测深区域通过设立1个或者多个验潮站控制测区水位变化,采用单站水位改正、线性内插、水位分带、时差法对测点瞬时水深进行水位改正,归算到深度基准面上;RTK三维水深测量的方法是采用单基准站RTK或网络RTK技术与测深设备同步采集数据,并实时获取测点水位信息。RTK三维水深测量与验潮仪验潮相比,能实时、动态、高精度获得测点位置及水位信息,同时可以获取仪器的瞬时三维姿态,极大地方便了内业数据的处理,省略了大量、繁琐的水位站设置工作,且获得的水位能够在一定程度上减弱测量过程中测船的升沉对水深测量的影响,对仪器姿态进行了改正,提高了测量精度。
CORS技术、单基准站RTK技术均可实现RTK三维水深测量,与单基准站RTK技术相比,CORS作业方式时只需1台移动接收机,无需架设基准站就能实时、动态、高精度地测量,且作业距离、测量精度不受移动站与基准站的距离制约,克服了单基准站RTK技术水下地形长距离、大范围作业时,由于基准站作用距离有限而时常搬站的难题。对于长期监测的水下地形测量项目,利用CORS技术可以有效解决测量基准沉降的问题。
目前浙江省连续运行卫星定位综合服务系统(Zhejiang Continuous Operational Referens System,以下简称ZJCORS)已被大量应用于陆域测绘,但涉及大范围、大面积海洋测绘的应用并不多。近几年,浙江省政府大力提倡“发展海洋经济,建设海洋浙江”,海洋测绘必将起到举足轻重的作用,可靠、高效、高精度地获取海洋测绘基础数据,满足生产建设需要,是新形势对海洋测绘提出的要求。基于ZJCORS技术的优势和应用前景,本文探讨基于ZJCORS的RTK三维水深测量技术在浙江省沿海水下地形测量的可行性,与应用较为成熟的传统验潮仪验潮模式进行对比试验,得出相关结论,并提出了基于ZJCORS的RTK三维水深测量应注意的问题。
2 ZJCORS的RTK三维水深测量可行性探究
2.1 ZJCORS站的分布及测量精度
ZJCORS采用虚拟参考站技术(VRS),在全省布设16个省级基准站,站间距离70~80 km;加密建设约50个市级站,站间距离30~50 km;并设立1个省级数据处理、交换中心,多个地市数据处理分中心,形成省、市2级中心互通的服务体系,CROS网络可以有效覆盖浙江省沿海区域,ZJCORS基准站的分布见图1。
ZJCORS能够提供全天候的网络RTK、RTD数据服务,可兼容市面上所有支持差分的进口及国产GNSS接收机设备,支持CMR+、RTCM3.0、RTCM2.3等多种差分数据格式,实时定位精度平面方向优于3 cm,高程方向优于5 cm[1];同时具备MAX(iMAX)、VRS、FKP等多种差分算法,支持GPS、GLONASS双星差分。
2.2 ZJCORS的RTK三维水深测量原理
ZJCORS的RTK三维水深测量原理:在一定区域内建立多个基站,在该区域构成网状覆盖,并进行连续跟踪观测,通过这些站点组成卫星定位观测值的网络解算,获取覆盖该地区某时段的RTK改正数,对该区域内RTK用户进行实时RTK改正,获得RTK固定解;再经过测区的WGS84大地坐标与地方坐标的参数转换和水准高与大地高的高程异常模型转换,从而获取测点地方坐标和实时水位,用于测点的水深改正;定位仪器在采集三维坐标的同时也采集仪器三维姿态信息,并作姿态改正以消除作业过程中由于测船摆动而产生的平面及高程偏差。

图1 ZJCORS基准站分布图
2.3 ZJCORS的RTK三维水深测量技术瓶颈及解决方案
目前,在水下地形测量中利用ZJCORS技术可以直接获取测点的WGS84坐标,其平面位置可以通过测区的WGS84坐标与地方坐标系的严密转换关系获得,且转换关系的获得相对比较容易。测点的高程异常值可通过测区的高程异常拟合模型、似大地水准面精化模型内插等方法获取。目前ZJCORS测量并不提供浙江省区域内的似大地水准面成果,因此要获取测点高程异常值需要建立测区的高程异常拟合模型。在浙江省沿海水下地形测量中,测量区域经常有跨较宽阔水面、呈狭长带状分布的特点,例如钱塘江及杭州湾区域、舟山海域、三门湾海域和椒江、瓯江、飞云江江道及入海口等,在上述区域建立高程异常拟合模型时需充分考虑模型是否能够反映、控制整个区域的高程异常变化,特别是较宽水域的高程异常变化。本文尝试综合采用高程异常等值线法和二次曲面数学拟合模型方法,建立类似上述区域的高程异常拟合模型,对测点高程异常进行计算,并采用常规验潮方法对获得的测点水位进行校核、较差统计,探索ZJCORS技术在浙江省沿海大范围、大跨度地实施RTK三维水深测量的有效应用方法。
3 ZJCORS的RTK三维水深测量与验潮仪验潮对比研究方案设计
对比试验在椒江口航道监测水下地形项目中实施,该项目位于浙江省椒江口,口门最宽处约20 km,最窄处约5 km,具体位置见图2,在ZJCORS网络的有效控制范围内。试验中,对验潮仪验潮和RTK三维水深测量法的潮高基准、数据采集方案及误差源控制、内业数据处理方法进行详细设计,确保2种方法采集的测点水位具有一致性、准确性、可靠性、可比性。
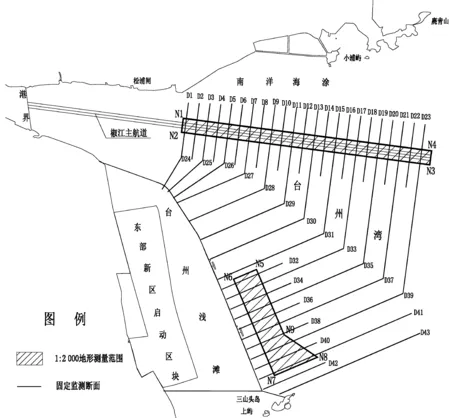
图2 水下地形项目测量范围示意图
3.1 潮高基准设计
试验中2种方法的潮高采用1985国家高程基准,验潮站工作水准点高程采用四等水准接测,水位接测按照图根水准要求测定。
测点高程异常的获取:结合高程异常等值线法和二次曲面数学拟合模型建立该区域高程异常拟合模型,模型拟合GPS数据采用项目中施测的D级GPS控制网成果及网络RTK控制测量成果,水准数据采用项目中的四等水准成果,椒江南北两岸高程采用跨江三角高程进行联测。该区域高程异常等值线图及模型拟合精度统计见图3、表1。
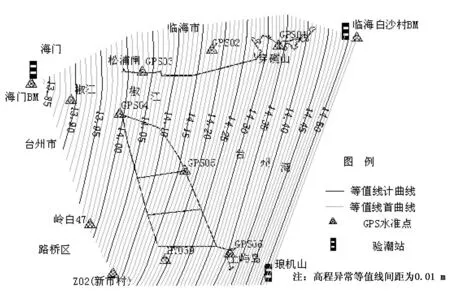
图3 椒江口高程异常等值线图
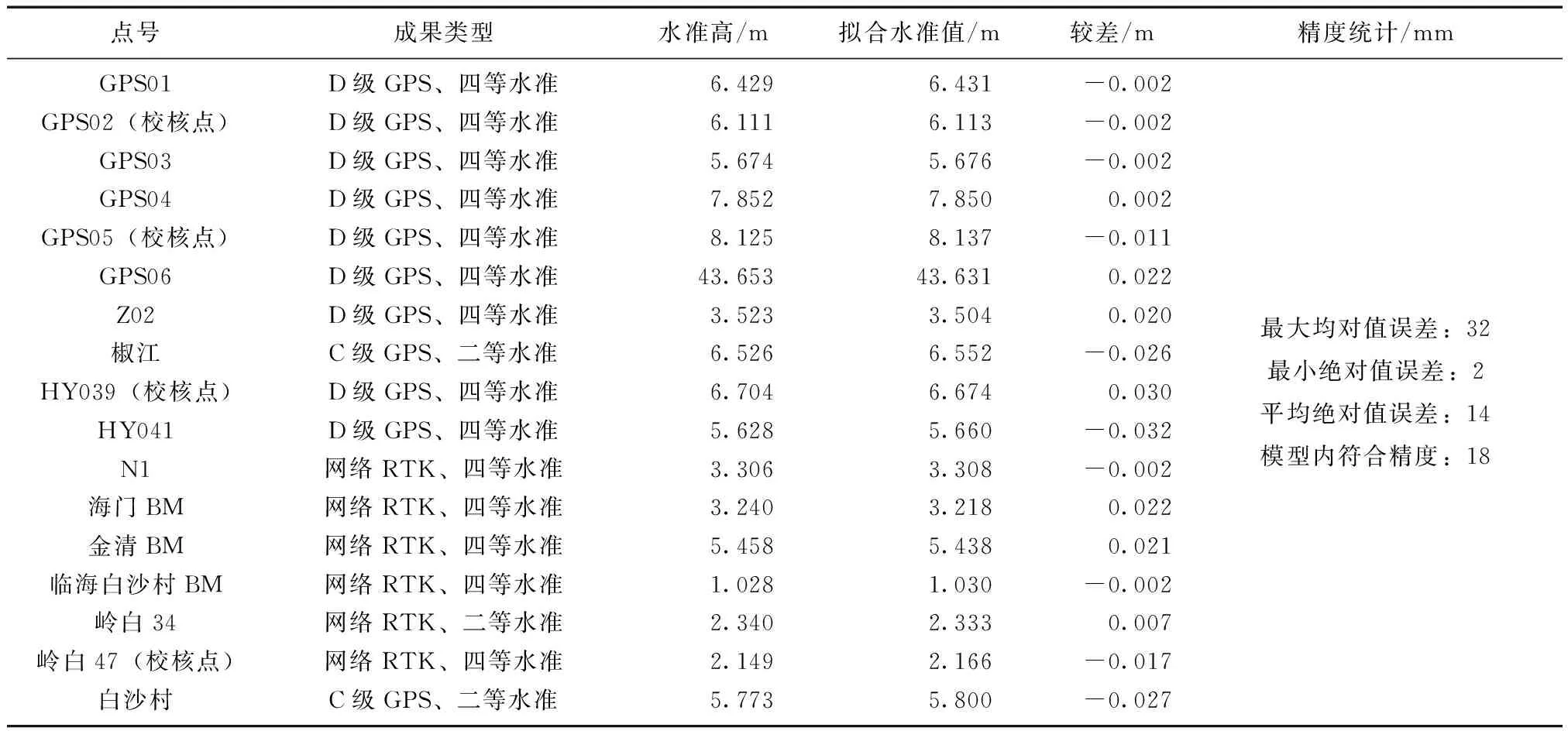
点号成果类型水准高/m拟合水准值/m较差/m精度统计/mmGPS01D级GPS、四等水准6.4296.431-0.002GPS02(校核点)D级GPS、四等水准6.1116.113-0.002GPS03D级GPS、四等水准5.6745.676-0.002GPS04D级GPS、四等水准7.8527.8500.002GPS05(校核点)D级GPS、四等水准8.1258.137-0.011GPS06D级GPS、四等水准43.65343.6310.022Z02D级GPS、四等水准3.5233.5040.020椒江C级GPS、二等水准6.5266.552-0.026HY039(校核点)D级GPS、四等水准6.7046.6740.030HY041D级GPS、四等水准5.6285.660-0.032N1网络RTK、四等水准3.3063.308-0.002海门BM网络RTK、四等水准3.2403.2180.022金清BM网络RTK、四等水准5.4585.4380.021临海白沙村BM网络RTK、四等水准1.0281.030-0.002岭白34网络RTK、二等水准2.3402.3330.007岭白47(校核点)网络RTK、四等水准2.1492.166-0.017白沙村C级GPS、二等水准5.7735.800-0.027最大均对值误差:32最小绝对值误差:2平均绝对值误差:14模型内符合精度:18
由图3可知,测区两岸高程异常从西北向东南均匀变化,约每1 km增加0.030 m,且不存在异常值突变点,模型建立时不需要分区、分块处理。由表1可知,利用二次曲面建立的模型最大均对值误差为0.032 m,最小绝对值误差为0.002 m,平均绝对值误差0.014 m,模型内符合精度0.018 m。外部校核点误差小于0.030 m,模型整体精度较高,且较均匀,可以对测点水位大地高进行高程异常改正。
3.2 数据采集方案及误差源控制
2种测量方法的定位均采用ZJCORS技术,导航定位软件采用中海达“海洋测量软件”,按照固定距离采集数据,数据均为原始WGS84坐标,无验潮采集的水位信息为测点瞬时水位WGS84大地高。
验潮:根据测区地形及潮流情况设立临海白沙村、琅机山、海门3个验潮站,水位观测采用自记水位计,各测点的瞬时水位采用时差法内插获得,测点定位采用ZJCORS技术。为保证水位数据及内插水位的准确性,需特别关注验潮仪的时间设置、校准、比对及基准设置,以及水位数据的粗差探测及平滑消浪处理。
RTK三维水深测量:采集数据时需准确量取水面至接收机天线的距离,接收机天线安装在船舷中央,最大程度减少纵摇、横摇的影响,安装位置的选择也需要避免测船对接收机天线卫星信号的遮挡,确保接收机工作时有足够的有效卫星数,保证较低的PDOP值。
3.3 数据处理及分析
验潮仪验潮和RTK三维水深数据处理与分析是针对2种验潮模式水位信息。
3.3.1 验潮仪验潮水位计算
求取测点水位时,采用时差法内插得出测量期间任意点任意时刻的水位,计算见公式(1)、(2)、(3)[2]:
ξp=ξA+{XP-XA}[(YC-YA)(ξB-ξA)-(YB-YA)×
(ξC-ξA)]+(YP-YA)[(YB-YA)(ξC-ξA)-(YC-YA)(ξB-ξA)]}/[(YB-YA)(YC-YA)-(YC-YA)(YB-YA)]
(1)
tA=t+τp;tB=t+τp-τB;tB=t+τp-τC
(2)
(3)
式中:ξA、ξB、ξC为对应tA、tB、tC时刻A、B、C验潮站瞬时水位值,m;τp为测点相对于A水位站的潮时差,min;τB、τC为B、C水位站相对于A水位站的潮时差,min,其计算可以采用最小二乘参数法计算得出,测点水位计算在程序中完成;X、Y为测点及潮位站坐标,m。
3.3.2 RTK三维水深测量法水位计算
RTK三维水深测量法水位计算过程即测点高程异常计算,根据2.1中的描述,结合等值线法和二次曲面数学拟合模型相结合的方法建立高程异常拟合模型,计算在程序中完成,二次曲面模型公式见公式(4)[3],测点高程计算见公式(5):
A0+A1×X+A2×Y+A3×X2+A4×Y2+A5×X×Y+ξ=0
(4)
h=H-ξ
(5)
式中:ξ为测点高程异常,m;X、Y为测点位置,m;A0~A5为拟合系数;h为测点1985国家高程基准,m;H为测点大地高,m。
3.3.3 样本数据的选取及结果对比
为保证对比数据的准确性,尽可能减少测量误差对对比结果的影响,样本数据的选取需满足:采集数据时海况较好,风浪较小;选取的样本均匀分布于测区;对比时考虑测船动吃水对水位的影响;有验潮与无验潮水位样本测点一一对应。最后选用2组数据样本,数据及对比结果见图4 、5 ,对比精度统计见表2。
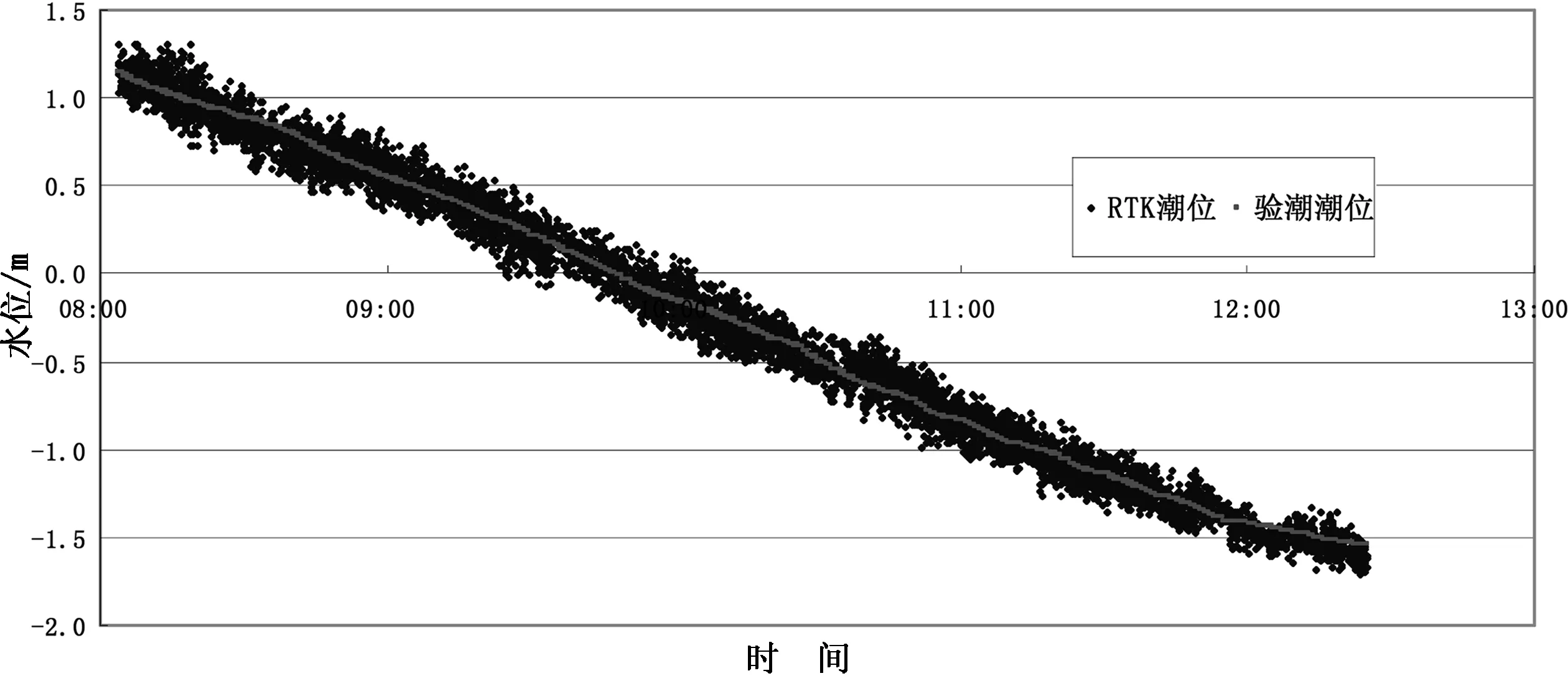
图4 RTK三维水深测量水位与验潮水位对比图(样本1)
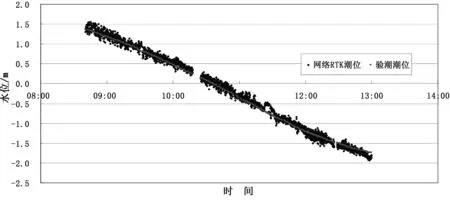
图5 RTK三维水深测量水位与验潮水位对比图(样本2)
表2 RTK三维水深测量水位与验潮水位较差(Δ)统计表
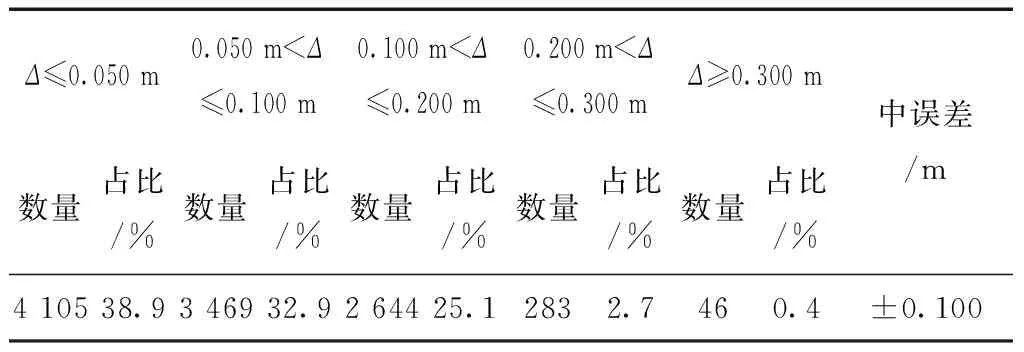
Δ≤0.050m0.050m<Δ≤0.100m0.100m<Δ≤0.200m0.200m<Δ≤0.300mΔ≥0.300m数量占比/%数量占比/%数量占比/%数量占比/%数量占比/%中误差/m410538.9346932.9264425.12832.7460.4±0.100
由图4、5可知,RTK三维水深测量的水位与验潮水位总体一致。RTK三维水深测量水位以验潮站水位为中心呈上下波动趋势,上下波动的是由测量过程中测船的升、沉引起;图5中10:15、11:30左右,网络RTK水位整体偏离验潮水位,经检查是因网络RTK信号失锁导致。由表 2 可知,2种方法获取的水位较差比较点小于0.100 m的占71.8%, 0.100 m与0.200 m之间的占25.1%,大于0.200 m的占3.1%,总体较差中误差为0.100 m。由此可见2种方法获取的水位差异较小,具有一致性。
4 结论及建议
由网络RTK三维水深测量与验潮仪验潮方法获取的水位对比分析可得出以下结论及建议:
(1)本文结合高程异常等值线法和二次曲面数学拟合模型建立的该区域高程异常拟合模型能够高精度地反映椒江口两岸及水域区域高程异常的变化趋势;网络RTK无验潮与有验潮作业模式获取的水位具有一致性,无验潮数据真实、可靠。
(2)RTK三维水深测量能够抵消部分测量过程中由于风浪和测船升沉、摇摆引起的测量误差;与验潮模式相比,这种作业模式无需设立验潮站,内业数据处理较简洁,极大地方便了水下地形测量的内、外作业,节约了生产成本,较好地保证了野外数据采集精度。
(3)基于ZJCORS的RTK三维水深测量作业模式可以有效解决该区域航道动态监测基准沉降问题,与单基准站的RTK三维水深测量作业方法相比,无需考虑作业距离,作业跨度大。
(4)目前ZJCORS的应用不提供测点1985高程基准值,因此测点1985高程基准值需单独建立高程异常模型进行转换;在初次水下地形测量的测区、范围较大的测区、跨较宽水域建立高程异常拟合模型时须确保高程异常拟合点能够有效控制测区高程异常变化,并设立验潮站对网络RTK水位进行校核。
(5)网络RTK水下地形作业时,基站信号中断或者基站切换会导致获取水位值为浮动解或者单点解,误差较大,作业时需做好记录,以便内业数据处理时对测点水位进行合理修正;海上作业风浪对船的摇摆影响较大,GNSS接收机的姿态改正对角度最大偏移量有限制,需选择良好海况进行作业。
[1]蔡荣华,苏立钱,杨一挺,等.浙江省省级CORS系统RTK测试与分析[J].全球定位系统,2009,41(5):41-45.
[2]赵建虎.现代海洋测绘(上册)[M].武汉:武汉大学出版社,2007.
[3]李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2007.
(责任编辑 张书花)

2015-06-01
浙江省科技计划项目(2015F10004)。
祁敏敏(1984-),男,工程师,大学本科,主要从事海洋测绘和工程测量工作。
P716+.2
A
1008-701X(2016)01-0084-03
10.13641/j.cnki.33-1162/tv.2016.01.025
