变电站巡检机器人的控制检测仿真测试系统
2016-12-07熊泽群黄石磊李永熙孙凯贾同辉
熊泽群, 黄石磊, 李永熙, 孙凯, 贾同辉
(1.国网安徽省电力公司检修公司,安徽 合肥 230000;2.山东鲁能智能技术有限公司,山东 济南 250101)
变电站巡检机器人的控制检测仿真测试系统
熊泽群1, 黄石磊1, 李永熙1, 孙凯2, 贾同辉2
(1.国网安徽省电力公司检修公司,安徽 合肥 230000;2.山东鲁能智能技术有限公司,山东 济南 250101)
变电站巡检机器人后台系统需要完善的测试,而现有测试环境存在不足之处,针对这些不足提出一种变电站巡检机器人的控制检测仿真测试系统。包括仿真控制子系统和检测子系统,主要是针对变电站巡检机器人控制子系统进行的仿真模拟。实现部分介绍仿真控制子系统的启动流程,并重点论述巡检任务仿真处理流程。实际应用表明,提高了变电站巡检机器人后台系统的测试效率,降低测试成本,可以进行长时间、大规模、极限性测试。
巡检机器人;变电站;仿真测试;控制;检测
0 引 言
目前,对变电站设备巡检工作主要分为人工巡检和机器人巡检两种方式。传统的人工巡检方式存在劳动强度大、工作效率低、检测质量分散等不足,并且人工巡检后不能及时准确地将检测数据传送到管理信息系统。近年来,国家电网公司大力推广变电站智能巡检机器人系统,使得机器人巡检方式已经全面实现视觉检测、红外测温、远程控制、智能分析、缺陷管理、仪表读数、闸刀和开关状态判别、微气象数据采集分析及自主充电等功能的应用。随着变电站巡检机器人技术的不断发展,机器人巡检方式将逐步代替人工巡检方式。
变电站智能巡检机器人系统包括变电站巡检机器人(也称作:移动站系统)和变电站巡检机器人后台系统(简称:后台系统,也称作:基站系统)[1-2]。后台系统是提供给变电站运维人员使用的工具,它可以用来控制变电站巡检机器人、命令机器人运行巡检任务、展示和分析设备巡检数据等。因此,后台系统的稳定性至关重要,要获得稳定的后台系统,系统必须经过完善的测试,但是目前后台系统的测试环境存在机器人资源有限、测试效率低、测试时间短、测试规模小,现场测试成本高等不足。
本文针对现有后台系统测试环境存在的不足,提出变电站巡检机器人的控制检测仿真测试系统(简称:仿真测试系统),该系统可以提高测试效率,降低测试成本,使后台系统可以进行长时间、大规模、连续性、极限性测试,从而使后台系统的测试更加完备。该仿真测试系统已经在山东鲁能智能技术有限公司投入使用,并取得很好的使用效果。
1 变电站巡检机器人
国内最早开始研究变电站巡检机器人的是国网山东省电力公司电力科学研究院及下属的山东鲁能智能技术有限公司,并于2002年成立国家电网公司电力机器人技术实验室,主要开展电力机器人技术的研究,在2004年成功研制出第一台变电站巡检机器人,后续依托国家“863项目”的支持,研制出系列化的变电站巡检机器人产品[3]。
变电站巡检机器人的整体结构主要包括控制子系统、检测子系统和通信子系统三个部分,如图1所示。

图1 变电站巡检机器人整体结构图
1.1 控制子系统
控制子系统的核心是工控机,而工控机也可以使用PC104主板[4]来代替。工控机中安装有基于嵌入式Linux操作系统设计的下位机程序。工控机通过串口与驱动模块、云台模块[5]、电源模块[6]通信,由下位机程序完成对它们的控制。工控机通过网口与交换机连接,然后通过无线网络与后台系统通信,工控机中的下位机程序作为TCP服务端,后台系统作为TCP客户端,后台系统与下位机程序建立连接之后,就可以控制变电站巡检机器人进行巡检工作。
1.2 检测子系统
检测子系统主要完成变电站设备巡检任务中的检测数据采集,包括可见光检测和红外检测,可见光检测是通过高清网络摄像机完成设备可见光图片的采集,红外检测是通过红外热像仪完成设备红外热图的采集。检测子系统包括高清网络摄像机、视频服务器、红外热像仪三个检测设备,它们通过网口与交换机连接,实时视频流和检测采集到的可见光图片、红外热图,通过无线网络传送给后台系统。其中,实时视频流包括高清网络摄像机提供的可见光视频流和视频服务器提供的红外视频流,红外视频流是由红外热像仪通过BNC接口传送给视频服务器的。
1.3 通信子系统
通信子系统主要包括交换机和无线通信模块,其中,交换机的作用是将机器人本体网络设备连接在一起,并与无线网络连接;无线通信模块的作用是与后台系统的无线通信模块组建无线网络,从而可以使机器人本体网络设备通过无线网络与后台系统进行通信。
2 后台系统
后台系统包括数据库、服务端、客户端,如图2所示。除此之外后台系统还包括部署数据库和服务端的服务器、部署客户端的监控中心PC、网络硬盘录像机、路由器、无线网桥等硬件设备。
2.1 数据库
后台系统数据库用于存储模型数据、巡检数据和实时数据。模型数据包括系统参数模型、机器人参数模型、变电站设备模型、巡检任务模型,模型数据主要用于保存系统配置、机器人配置和巡检模型配置的参数信息。巡检数据主要包括机器人巡检过程中产生的设备检测结果、针对检测进行模式识别的结果、单设备及多设备检测报表、巡检任务报表等。实时数据主要存储机器人运行过程中产生的参数、设备运行参数、环境的温湿度等。
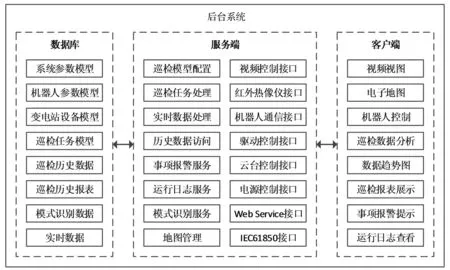
图2 后台系统结构图
2.2 服务端
后台系统服务端为客户端提供检测设备接口(视频控制接口和红外热像仪接口)、机器人控制接口(机器人通信接口、驱动控制接口、云台控制接口、电源控制接口)、数据处理(巡检任务处理和实时数据处理)、数据访问(历史数据访问、事项报警服务、运行日志服务)、模式识别服务,为第三方系统提供数据交互接口(Web Service接口、IEC61850接口),还提供系统配置及管理(巡检模型配置和地图管理)。
2.3 客户端
后台系统客户端是与用户进行交互的平台,为用户主要提供视图展示(视频视图和电子地图)、机器人控制、数据分析(巡检数据分析、数据趋势图、巡检报表展示)、运行数据展示(事项报警提示和运行日志查看)等功能。其中,视频视图可以调用视频设备提供的SDK接口完成视频连接和视频预览[7]。
2.4 测试环境
目前后台系统的测试需要变电站巡检机器人在不同的测试环境下参与进行,主要包括四种测试环境:(1) 办公室临时测试环境,(2) 实验室测试环境,(3) 生产车间测试环境,(4) 变电站现场测试环境。
这四种测试环境存在以下不足:(1) 测试中一个后台系统需要独立使用一台变电站巡检机器人,然而提供用于测试的机器人资源有限,所以容易产生软件测试人员需要等待正在测试的人员完成测试任务后再进行测试的现象。(2) 机器人测试中需要消耗电池电量,根据不同的测试环境和强度,充满电的电池一般可以提供9到18小时的测试时间。这将导致软件测试人员无法进行长时间连续性测试,并且容易造成测试中断。(3) 办公室临时测试环境因为受限于办公室空间,往往需要将机器人架高进行测试,测试中机器人驱动悬空进行空转,并且需要人为读RFID标签[8](磁导航方式)模拟到位,从而导致测试效率降低。(4) 实验室测试环境因为测试区域固定,因此无法进行大规模测试和极限测试。(5) 生产车间测试环境主要用于机器人出厂测试,主要是质量控制人员检验机器人本体的生产工艺,所以无法给后台系统提供完整性的测试。(6) 变电站现场测试环境是最真实也是最好的测试环境,但是需要软件测试人员出差前往变电站现场,从而增加测试成本。
3 仿真测试系统
根据目前后台系统四种测试环境存在的不足,分析仿真测试系统的需求:(1) 节省机器人资源;(2) 延长测试时间,进行长时间测试;(3) 提高测试效率;(4) 提高测试规模,进行大规模测试和极限测试。(5) 降低测试成本。
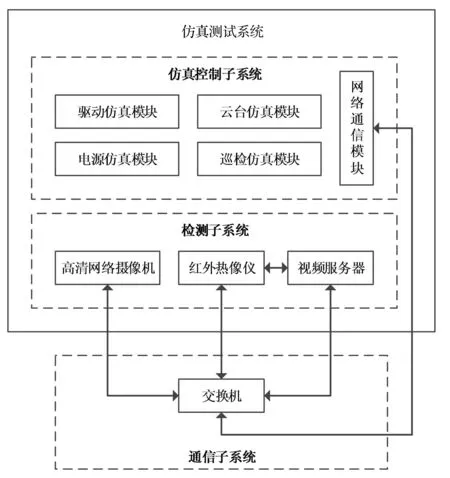
图3 仿真测试系统结构图
3.1 系统设计
仿真测试系统的结构如图3所示,包括仿真控制子系统和检测子系统。
因为变电站巡检机器人的控制子系统的设备资源相对有限,并且控制子系统使测试环境受到一定的限制,而控制子系统又相对稳定,不需要过多的测试。所以通过仿真控制子系统来针对变电站巡检机器人的控制子系统进行仿真设计,通过软件模块仿真机器人的硬件模块(驱动模块、云台模块、电源模块)和软件模块(下位机程序)的工作原理,并且该仿真控制子系统支持扩展。
由于变电站巡检机器人的检测子系统本身就需要进行大量测试,其中的设备资源也相对丰富,而且设备支持并发测试,因此仿真测试系统的检测子系统与变电站巡检机器人的相同,没有进行仿真。而仿真测试系统支持扩展,所以也可以根据测试人员的需求对检测子系统进行仿真,具体的扩展方式在第3.3节中进行介绍。
因为变电站巡检机器人的设备都集中机器人本体中,所以设备与后台系统通信需要通过无线通信模块。然而仿真测试系统的设计是分布式的,其中仿真控制子系统是软件系统,它可以部署在后台系统所在的服务器上或者与后台系统同局域网的服务器上,检测子系统可以部署在与后台系统相同的局域网内,所以仿真测试系统可以不需要无线通信模块,这样通信子系统中只需要交换机。
3.2 系统实现
仿真测试系统中的仿真控制子系统通过软件实现,使用C++语言进行编程,可以在Windows或Linux操作系统上编译生成可执行文件,即仿真控制子系统可以跨平台运行。检测子系统主要通过搭建硬件设备平台实现。下面主要针对仿真控制子系统的启动流程和巡检任务仿真处理流程进行论述。
(1) 仿真控制子系统启动流程
仿真控制子系统启动流程中,首先加载系统模块实例(控制单元管理器、通信管理器、线程池、以太网通信服务、串口通信服务、实时控制服务、运行日志服务、消息队列等),加载系统参数配置和巡检模型参数配置,加载驱动仿真模块、云台仿真模块、电源仿真模块、巡检仿真模块。然后启动系统子线程(以太网通信线程、串口通信线程、实时控制线程、运行日志线程、数据上送服务线程、定时服务线程等)。最后启动仿真控制定时器,完成仿真控制子系统的启动流程。其中,在仿真控制定时器中,首先仿真产生驱动、云台、电源硬件控制板卡的版本号;然后仿真产生机器人正常运行中驱动、云台、电源、巡检模块的运行数据(驱动控制模式、左右轮速度、电池电压、电流、电量、充电状态、云台坐标、云台转动状态、巡检任务状态等)。
(2) 巡检任务仿真处理流程
图4给出巡检任务仿真处理的流程,具体步骤如下:
步骤1:启动巡检任务。后台系统发送启动T-ID对应巡检任务的命令给仿真测试系统,T-ID为巡检任务ID。仿真测试系统收到启动命令之后,完成巡检任务启动,生成T-ID对应巡检任务绑定的停靠点列表,初始化当前S-ID=0,S-ID为停靠点ID。
步骤2:仿真测试系统模拟机器人行走。
步骤3:仿真测试系统执行模拟行走定时。定时结束后模拟停靠点到位停车,给后台系统反馈停靠点到位事件以及S-ID,后台系统根据S-ID通过事项显示停靠点相关的信息。
步骤4:仿真测试系统生成S-ID对应停靠点绑定的检测点列表,初始化当前C-ID=0,C-ID为检测点ID。
步骤5:仿真测试系统准备执行C-ID对应检测点的命令。
步骤6:仿真测试系统模拟云台转动,执行模拟转动定时。模拟云台转动的同时,给后台系统反馈云台转动事件以及C-ID,后台系统从数据库中获取C-ID对应检测点的可见光变倍值和红外调焦值,然后给仿真测试系统发送可见光变倍和红外调焦命令。仿真测试系统收到命令后,完成可见光变倍和红外调焦操作。
步骤7:仿真测试系统模拟云台转动定时结束后,模拟云台转动到位,给后台系统反馈云台到位事件以及C-ID。后台系统收到云台到位事件后,给仿真测试系统发送抓取可见光图片和抓取红外热图的检测命令。仿真测试系统收到检测命令后,完成可见光图片和红外热图的抓取操作。
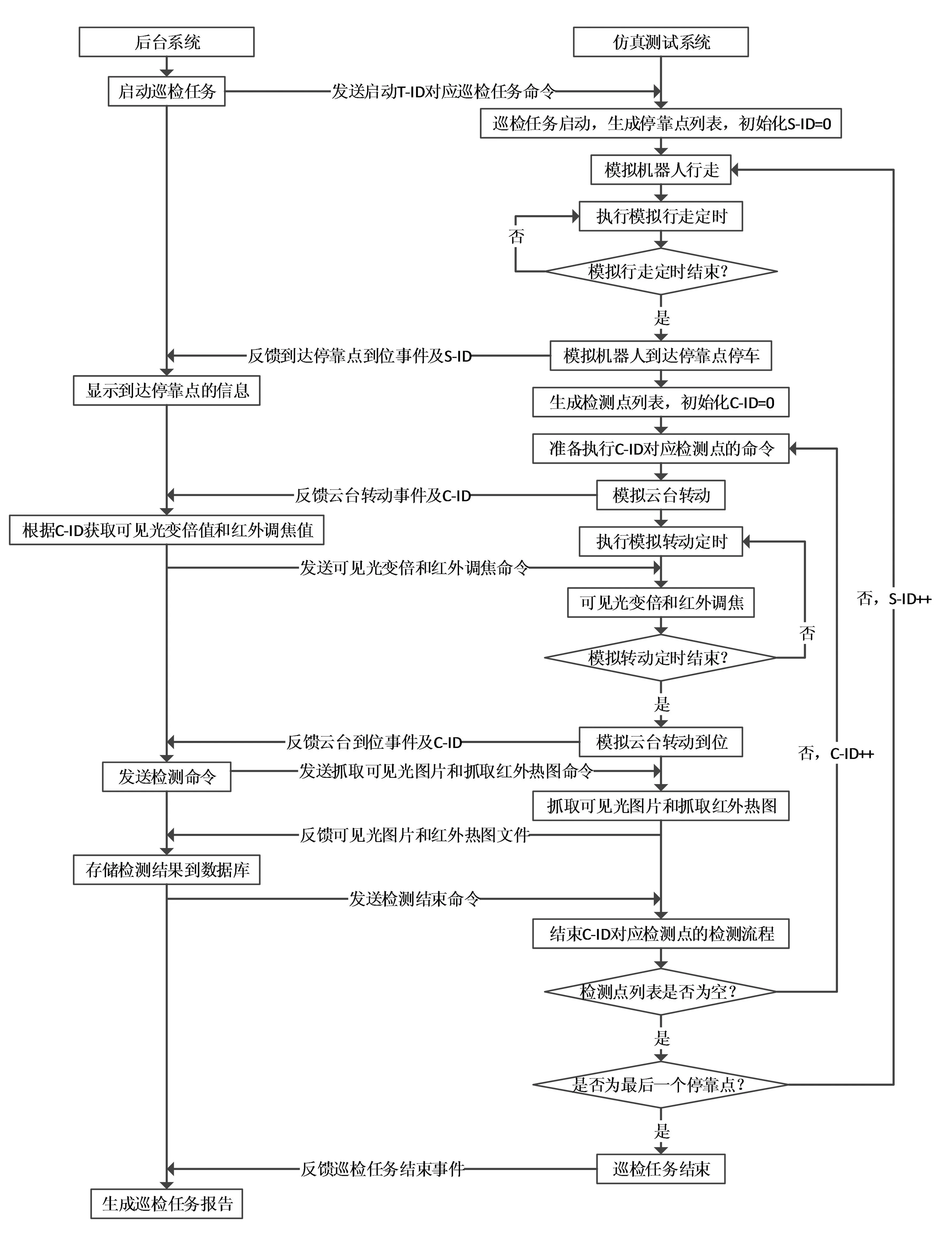
图4 巡检任务仿真处理流程图
步骤8:仿真测试系统将检测抓取到的可见光图片和红外热图文件反馈给后台系统,后台系统收到后将检测结果存储到数据库中,然后给仿真测试系统发送检测结束命令,结束C-ID对应检测点的检测流程。
步骤9:仿真测试系统判断S-ID对应停靠点绑定的检测点列表是否为空,如果不为空,C-ID++,然后执行步骤5;如果为空,执行下一步。
步骤10:仿真测试系统判断T-ID对应巡检任务绑定的停靠点列表是否为空,如果不为空,S-ID++,然后执行步骤2;如果为空,执行下一步。
步骤11:结束巡检任务。仿真测试系统给后台系统反馈巡检任务结束事件,后台系统收到后,生成T-ID对应的巡检任务报告,存储到数据库中。
3.3 扩展支持
仿真测试系统支持功能扩展,这里主要介绍检测子系统仿真扩展和硬件模块扩展两个方案。
(1) 检测子系统仿真扩展
第3.1节中介绍的检测子系统没有进行仿真,因此后台系统测试中就需要引入检测设备,然而,在特殊情况下软件测试人员可能需要进行纯仿真测试,这就需要通过软件模块设计实现仿真检测子系统。这样,仿真控制子系统和仿真检测子系统可以部署在同一台计算机上,并通过进程间通信方式或者本地网络通信方式实现数据交互,从而不再需要通信子系统。
仿真检测子系统的仿真方法是引入变电站现场具有机器人巡检结果的数据库,使用数据库中存储的可见光图片和红外热图模拟检测设备抓取可见光图片和抓取红外热图操作生成的文件,然后把可见光图片和红外热图文件发给后台系统。
(2) 硬件模块扩展
后台系统测试中,软件测试人员可能需要针对变电站巡检机器人的某个硬件模块进行测试,例如云台模块。这就需要仿真控制子系统支持扩展接入硬件模块设备,因为仿真控制子系统具有串口通信服务和以太网通信服务,所以通过串口或者串口服务器即可接入硬件模块设备,然后通过在仿真控制子系统中增加相应的配置,从而可以实现仿真硬件模块和实际硬件模块的功能切换。
4 结束语
本文介绍了变电站巡检机器人整体结构及其后台系统结构,并针对后台系统现有测试环境中存在的不足,提出变电站巡检机器人的控制检测仿真测试系统,该系统主要是针对变电站巡检机器人的控制子系统进行的仿真模拟。本文描述了该系统的需求分析、系统设计、系统实现以及扩展方案,并重点论述了巡检任务仿真处理流程。通过该系统可以提高后台系统的测试效率,减少机器人资源的使用,延长测试时间,扩大测试规模,降低测试成本,使后台系统的测试更加完备。
[1] 李向东,鲁守银,王宏,等.一种智能巡检机器人的体系结构分析与设计[J].机器人,2005,27(6):502-506.
[2] 鲁守银,钱庆林,张斌,等.变电站设备巡检机器人的研制[J].电力系统自动化,2006,30(13):94-98.
[3] 杨旭东,黄玉柱,李继刚,等.变电站巡检机器人研究现状综述[J].山东电力技术,2015,42(1):30-34.
[4] 董吉文,冯立强,鲁守银.变电站巡检机器人控制系统设计[J].微计算机信息,2009,25(5):220-222.
[5] 肖鹏,王海鹏,曹雷,等. 变电站智能巡检机器人云台控制系统设计[J]. 制造业自动化,2012,34(1):105-108.
[6] 杨墨,王仕荣,孙大庆,等.变电站巡检机器人电源系统研究[J]. 机电信息,2013,13(6):127-129.
[7] 刘凌,韩国政.变电站巡检机器人软件系统的设计[J].山东电力技术,2009,36(2):44-47.
[8] 周立辉,张永生,孙勇,等.智能变电站巡检机器人研制及应用[J].电力系统自动化,2011,35(19):85-88.
The Simulation Test System of the Control and Detection of Substation Inspection Robot
Xiong Zequn1, Huang Shilei1, Li Yongxi1, Sun Kai2, Jia Tonghui2
(1. Maintenance Company, Anhui Electric Power Company, State Grid Corporation of China, Hefei Anhui 230000, China;2. Shandong Luneng Intelligence Technology Co.,Ltd., Jinan Shandong 250101, China)
The background system of substation inspection robot need perfect test, but deficiencies exist in current test environment. Aimed at these deficiencies, the simulation test system of the control and detection of substation inspection robot was proposed. The system includes a simulation control subsystem and a detection subsystem. The system is mainly simulating the control subsystem of the substation inspection robot. In the implementation of the system this paper describes the boot process of the simulation control subsystem and focuses on the simulation process of the patrol task. The practical application shows that the simulation test system improves the test efficiency of substation inspection robot, reduces test cost, and supports the long time test, the large scale test, the limit test.
inspection robot; substation; simulation test; control; detection
10.3969/j.issn.1000-3886.2016.04.016
TP24
A
1000-3886(2016)04-0049-05
熊泽群(1980-),男,安徽安庆人,工程师,本科,研究方向:主要从事继电保护及控制系统方面的研究,现从事技术生产管理工作。
定稿日期: 2016-01-24
