基于KF联合EKF参数辨识的短时4D航迹预测
2016-12-06张成伟吴仁彪
章 涛,高 阳,张成伟,吴仁彪
(1.中国民航大学天津市智能信号和图像处理重点实验室,天津 300300;2.民航深圳空中交通管理站,深圳 518128)
基于KF联合EKF参数辨识的短时4D航迹预测
章涛1,高阳1,张成伟2,吴仁彪1
(1.中国民航大学天津市智能信号和图像处理重点实验室,天津300300;2.民航深圳空中交通管理站,深圳518128)
提出了一种KF(Kalman filter)和EKF(efxtended Kalman filter)联合算法辨识运动模型参数的4D航迹预测方法。该方法在等角航迹飞行模型的基础上,运用KF和EKF联合算法辨识航空器的地速,以此计算航空器未来特征位置的过点时间。仿真实验结果表明,该方法采用航空器的经纬度作为观测变量分别更新的方法,可降低运算复杂度,并能够较精确地预测航空器等速巡航阶段的短期飞行航迹。
卡尔曼滤波;扩展卡尔曼滤波;参数辨识;等角航迹;4D航迹预测
随着航空运输业的发展,传统的飞行计划结合空管动态调配的空中交通管理方式已不能满足空中交通的发展,空域资源有限和空域交通需求的矛盾日益突出[1-2]。因此,美国提出构建下一代空中交通运输管理系统。高精度的4D航迹预测是下一代空中交通运输管理系统的技术基础[3]。4D航迹通过控制航空器到达航路点的“时间窗”对航空器的位置进行精确描述,从而有效适应未来高密度、大流量、小间隔的空域情况。
基于4D航迹预测在下一代空中交通运输管理系统的重要性[4],国内外已对此展开大量研究。4D航迹预测研究算法可以分为2种:①基于KF或数据挖掘等无参数的预测方法[5-7]。无参数的4D航迹预测模型简单、适用范围广,但可扩展性差,不能很好地适应管制、气象环境变化等突发情况的干扰。②基于航空器动力学或运动学模型的预测方法[8-10]。通过对航空器每个飞行阶段进行空气运动学模型建模,推测航空器飞行环境(如风速、风向和温度变化等气象因素)对航迹的影响。但由于机型、载重等差异带来的航空器飞行性能的差异,导致预测精度不理想。基于数据挖掘的无参数预测方法和基于航空器动力学模型的预测方法多侧重全程航迹的预测。但飞行器的飞行过程受到管制、气象因素、空域流量和航空公司经济性等影响,往往会偏离飞行剖面,因此有必要对航迹进行实时预测和修正。徐琴等[11]提出了基于参数辨识的短期4D航迹预测,利用实时航迹信息,采用极大似然准则和牛顿-拉夫逊迭代算法对运动模型中的校正空速进行辨识,进一步推测航空器的过点时间[11]。然而,牛顿-拉夫逊算法迭代次数多、耗时长,还会出现似然函数发散的情况。
本文提出了一种基于KF联合EKF的参数辨识短时4D航迹预测方法,该方法在飞行器运动模型的基础上,建立状态方程和观测方程,运用实时航迹位置和时间数据依次采用KF和EKF滤波方法进行状态更新[12],并结合等角航迹模型预测过点时间。
1 航迹预测模型及其实现
等角航线是地球表面与经线相交成相同角度的曲线。地球表面除经线和纬线以外的等角航线都是以极点为渐近点的螺旋曲线。在实地观测中,航线与经线的夹角易于测得;等角航线在航行图(采用墨卡托投影)上表现为直线。因此,航空器在短距离飞行时多采用等角航迹的计算模式,建立等角航迹的运动模型,在该运动模型的基础上选择合适的滤波器状态方程和观测方程,然后根据观测点的状态信息(经度、纬度、时间等)估计辨识参数,根据运动模型预测观测点的过点时间,实现短期航迹推测。
1.1等角航迹飞行模型
等角航迹航线角和距离的计算公式由积分方法推导。假设一段航迹:α(φ1,λ1)为起始点,β(φ2,λ2)为终止点,其中φ为纬度,λ为经度。设航线与经度线的夹角为θ,距离为s,如果在该段航线内任取一小段航段ds,则该航段与相应的纬度、经度(dφ,dλcosφ)之间构成的三角形可看作平面直角三角形,如图1所示。由此可得
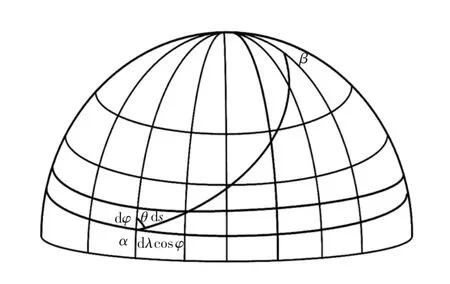
图1 等角航迹模型Fig.1 Isometric track model

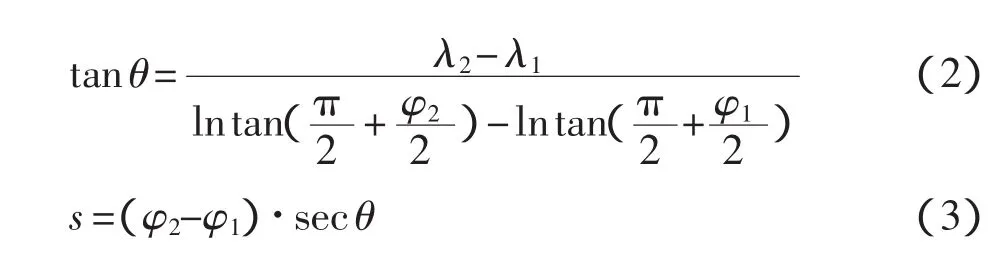
或

航空器等校正空速巡航过程中τ时间的等角航线距离为

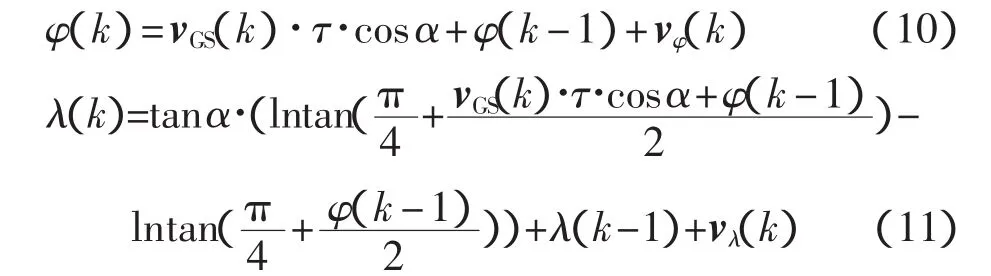
如果已知航空器当前位置A(φ0,λ0)点的经纬度、速度等,则航空器τ时间后的位置为

或

计算过程中,各个变量都转换成弧度制单位,等角航线距离(sm)与弧度制换算关系为1m=π(/180×111120)。
1.2参数辨识模型与航迹预测
通过雷达或ADS-B接收机可获取航空器实时航迹信息,包括航班号、飞机类型、飞行状态、经纬度、高度、时间等。在等速巡航阶段,航空器的地速变化主要受气象因素(温度、风速等)影响,会产生一定范围内的波动[13]。本文采用KF和EKF联合的方法对航空器地速进行参数辨识,估计飞行器短时间内准确的飞行状态变量。
航空器地速为vGS,则航空器在k时刻的运动状态量为vG(Sk),短时间内航空器所在空域的气象条件保持相对稳定,对航空器地速的影响也是固定的,地速仅存在随机扰动。因此,可得到递推方程,以及描述时间间隔为τ的下一时刻的运动状态方程为

观测状态方程为
观测矢量包含2个观测变量,并且第1个观测量和状态变量为线性关系,第2个观测量和状态变量为非线性关系。本文采用纬度KF更新然后经度EKF更新的联合观测更新方法。纬度观测变量KF更新为

其中


经度观测变量EKF更新为

其中

每个观测点可获得2个状态变量的真实值,k时刻的真实值为

设定在一个观测位置点的这两个真实值权重相同,则

最后,将辨识到的航空器地速结合等角航迹的飞行模型,可以推测未来时刻航空器的位置或航路上的过点时间。
2 实验仿真与分析
本文实验使用ADS-B接收机采集数据,采集时间为2013年10月25日,航班由石家庄正定国际机场飞往大连周水子机场,航班号为9C8873,机型为波音A320,选取巡航阶段的部分航迹数据参与计算,巡航高度大约为8 860 km,升降率为0,经纬度、速度等部分数据如表1所示。
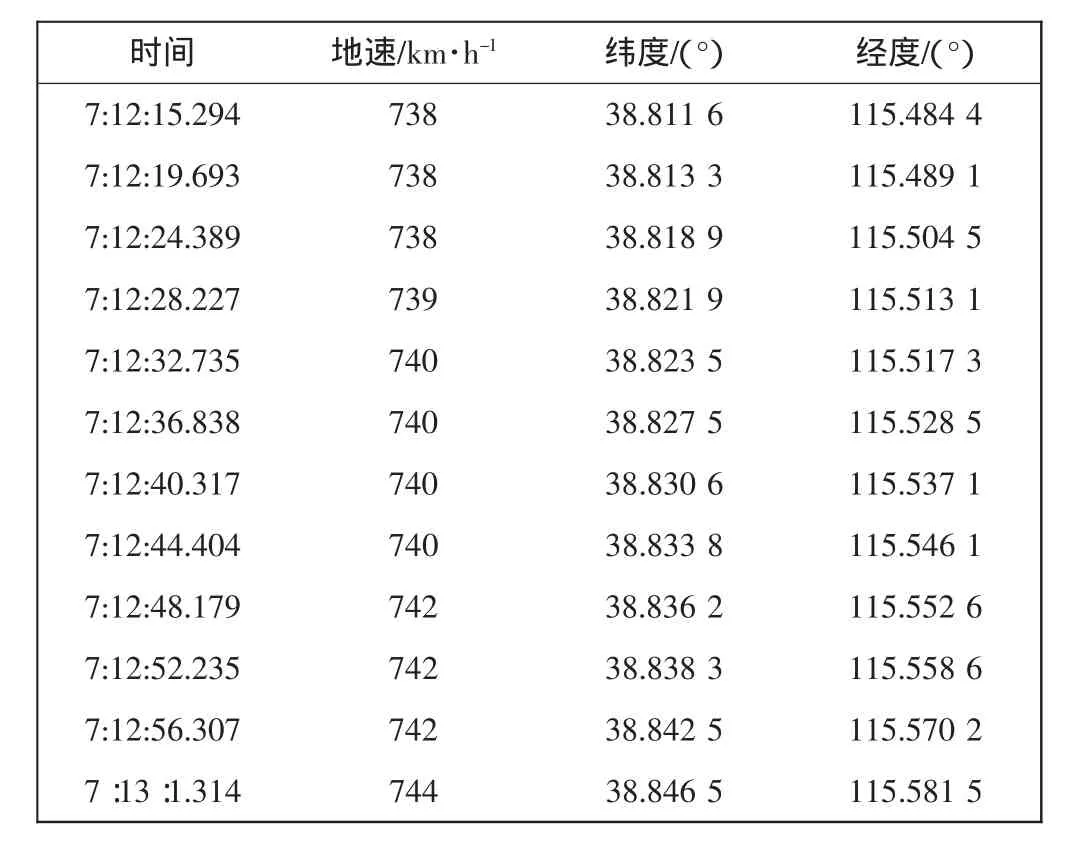
表1 观测点数据Tab.1 Observation Data
取初始化地速为100 m/s,通过KF和EKF对地速进行参数辨识,最后得到辨识地速,结果如图2所示。取数据中的25个时间点为观测点,观测点的部分经纬度位置数据如表2所示,用辨识得到的地速预测过点时间,预测时间如图3所示。
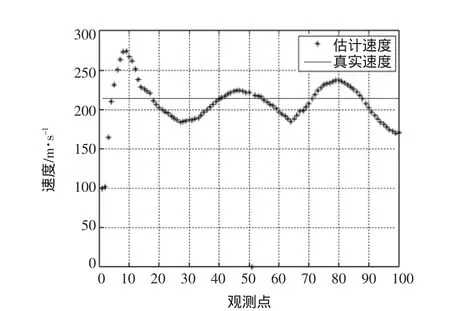
图2 地速辨识结果图Fig.2 Results of identified ground speed
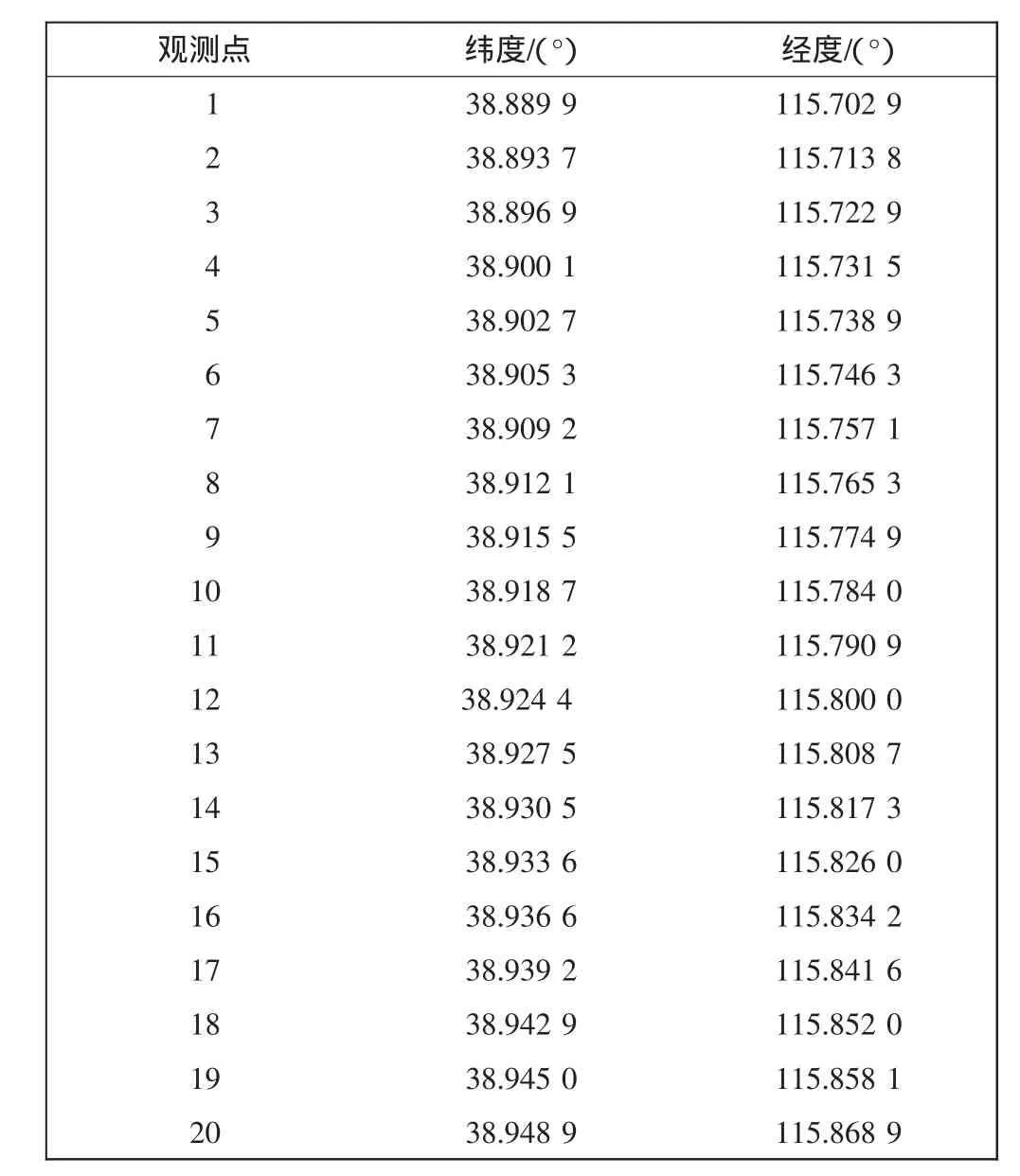
表2 预测点数据Tab.2 Predicted data
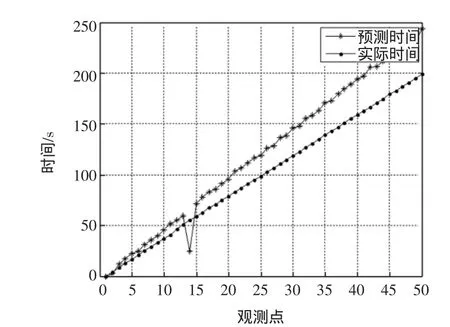
图3 预测过点时间和实际过点时间对比Fig.3 Comparison between predicted time and actual time
由图3可知,该方法可有效地预测等速巡航阶段的过点时间,预测过点时间在实际过点时间上下波动,比较贴合实际过点时间。预测误差随时间的推移会增大,5 min航程的预测误差可控制在50 s以内。因此,为了保证航迹预测的准确性,可根据实时航迹和飞行状态对航迹进行预测和修正。本文算法和传统KF算法的复乘次数对比如表3所示,其中N表示迭代更新的次数。本文方法避免了矩阵求逆等运算,减少了复乘次数,降低了运算复杂度。由于算例采用纬度经度分别进行观测更新的方法,运算复杂度低、模型简单、动态适应性强,使得该方法适应性强、适用范围广。
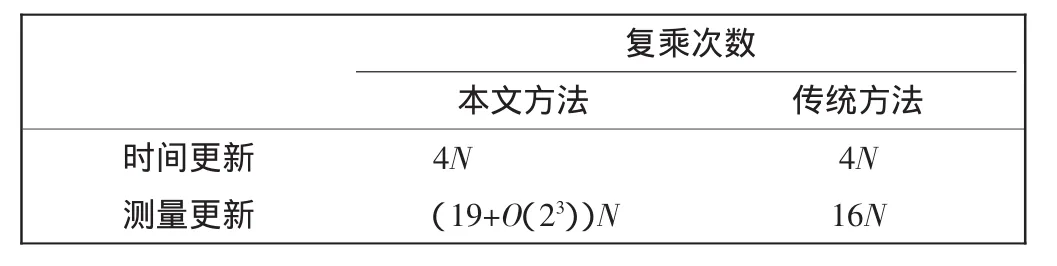
表3 运算量分析Tab.3 Com putation analysis
3 结语
本文研究了一种KF和EKF联合的方法用于辨识航空器飞行地速,并结合等角航迹运动模型进行短时4D航迹预测。该方法采用观测量分别更新的方法,避免了矩阵运算、减少了运算复杂度。本文暂未考虑更多的气象、管制因素等复杂状况,后期将进一步完善巡航阶段航迹预测方法,使该模型可适应更为复杂的巡航飞行;结合航空器进离港的爬升和下降阶段的特点建立预测模型,实现对整个飞行过程的航迹预测和修正。
[1]SOLOMOS G,URLASS S,BHADRA D,et al.Capacity Needs in the National Airspace System:An Analysis of Airport and Metropolitan Area Demand and Operational Capacity in the Future[R].The MITRE Center for Advanced Aviation System Development,2004.
[2]卢奕羽.初始飞行计划4D航迹生成及仿真系统研究[D].南京:南京航空航天大学,2014.
[3]伊群.美国新一代空中交通管理系统运行概念[J].中国民用航空, 2007,80(8):27-31.
[4]吕小平.中国民航新一代空中交通管理系统发展总体框架[J].中国民用航空,2007,80(8):24-26.
[5]PREVOST C G,DESBIENS A,GAGNON E.Extended Kalman Filter for State Estimation and Trajectory Prediction of a Moving Object Detected by an Unmanned Aerial Vehicle[C]//AmericanControlConference, New York,IEEE,2007:1805-1810.
[6]LYMPEROPOULOS I,LYGEROS J.Sequential Monte Carlo methods for multi-aircraft trajectory prediction in air traffic management[J].International Journal of Adaptive Control and Signal Processing,2010,24 (10):830-849.
[7]吴鹍,潘薇.基于数据挖掘的四维飞行轨迹预测模型[J].计算机应用,2007,27(11):2637-2639.
[8]SLATTERY R,ZHAO Y.Trajectory synthesis for air traffic automation[J].Journal of Guidance,Control and Dynamics,1997,20(2):232-238.
[9]王超,郭九霞,沈志鹏.基于基本飞行模型的4D航迹预测方法[J].西南交通大学学报,2009,44(2):295-300.
[10]CHESTER G,WILLIAM N C.Using Flight Manual Data to Derive Aero-Propulsive Models for Predicting Aircraft Trajectories[C]//AIAA Aircraft Technology,Integration and Operations(ATIO)2002 Technical.California:AIAA,2002:1-7.
[11]徐琴,汤新民,韩松臣,等.基于参数辨识的短期4D航迹预测[J].信息与控制,2014,43(4):501-505.
[12]杨宏,李亚安,李国辉.一种改进扩展卡尔曼滤波新方法[J].计算机工程与应用,2010,46(19):18-20.
[13]吴晓光,张军峰,蒋海行.GRIB数据及其在航迹预测中的应用[J].航空计算技术,2013,43(6):59-62.
(责任编辑:党亚茹)
Short-term 4D trajectory prediction based on KF joint EKF parameter identification
ZHANG Tao1,GAO Yang1,ZHANG Chengwei2,WU Renbiao1
(1.Intelligent Signal and Image Processing Key Lab of Tianjin,CAUC,Tianjin 300300,China; 2.Shenzhen Air Traffic Management Station,Shenzhen518128,China)
A method based on KF-EKF jointed algorithm is proposed to identify motion model parameters for 4D trajectory prediction.On the basis of isometric track flight model,KF-EKF jointed algorithm is employed to identify the ground speed of aircraft,then the arriving time of aircraft’s scheduled position is calculated.Latitude and longitude of aircraft are taken as observed variables and are updated respectively.Simulation result shows that it could reduce complexity of the computation and accurately predict the short-term flight track of constant speed cruise phase.
Kalman filter;extended Kalman filter;parameter identification;isometric track;4D trajectory prediction
TN959.4
A
1674-5590(2016)05-0001-04
2015-11-10;
2016-01-07基金项目:国家自然科学基金项目(F011206)
章涛(1989—),男,河北衡水人,硕士研究生,研究方向为4D航迹预测.