测绘相机调焦控制检测系统的设计与实现
2016-12-05侯丹陈雷何欣
侯丹,陈雷,何欣
(北京空间机电研究所 北京100094)
测绘相机调焦控制检测系统的设计与实现
侯丹,陈雷,何欣
(北京空间机电研究所 北京100094)
随着航天技术、信息技术的发展,使用高分辨率测绘相机对地观测已成为获取地理空间信息的一种重要手段。调焦控制电路对相机的调焦精度是影响测绘相机成像的重要因素。为保证调焦控制电路对调焦步进电机的控制精度,保证调焦机构控制的准确性。文中提出一种测新型的绘相机调焦控制检测系统,利用新型中断式信号采集方法从电机控制端检测并监视调焦控制电路输出控制波形。介绍了检测系统的原理、信号采集方式;给出该系统的组成,硬件软件的实现。实验证明,该系统为调焦电路准确控制输出提供可靠依据。
测绘相机;调焦控制;直线步进电机;检测与监视
测绘相机是空间对地观测的一种重要工具,为实现军事情报现代化、预防自然灾害起了极其重要的作用[1-4]。某型号由于焦面体积较大,调焦可利用空间较小,在拼接基座的两端各安装一个直线步进电机调焦的驱动。由于该型号采用两路调焦电路、存在调焦时间长,输出脉冲给的个数较多,容易产生两路调焦电路输出脉冲的个数不一致,运行时间不一致,导致步进电机输出控制与预想产生偏差。目前国内调焦机构的精度探测检测利用搭建机械机构及超精细部件进行检测[5]或者利用“电源柜-电机-测功机”[6]的方式进行检测。首先这些方法体积大,成本高,外场检测不易携带;另外并不能实际反应调焦电路对电机的控制状态监控。
文中提出了一种新型的测绘相机调焦电机控制检测系统,搭建了检测平台,通过利用新型中断式信号采集方法对两路调焦电路输出波形实时检测和处理,分析输出方向和步数,并对比两路输出波形。本检测系统从电机控制端精确采集控制输出波形,从电机根本控制角度为测绘相机调焦实现精确控制的提供依据,并且具有体积小,成本低,方便外场检测的优点。
1 直线步进电机驱动原理
直线步进电机一种是能够将电流脉冲信号转变为微步直线运动的驱动设备。直线步进电机凭借其高效的高速定位、高可靠性以及高密度性的数字式直线运动随动系统,广泛应用在精确直线运动运行的领域[7-8]。
直线步进电机受脉冲信号控制,每接收到一个脉冲控制信号,就改变一次励磁状态,驱动器按设定方向驱动电机行驶一个固定步距。脉冲输入越多,运行步距越多,即运行的距离越长;输入脉冲频率越高,速度越快;励磁状态改变的顺序不同,电机运行的方向就不同。因此通过控制脉冲有无,可控制电机的启动、停止;通过控制脉冲个数可控制电机位移量,达到准确定位的目的;通过控制脉冲频率可控制直线步进电机的速度,达到调速的目的;通过控制励磁状态改变的顺序,可控制电机的运行方向[9]。
调焦电路采用脉冲激励控制方式。直线步进电机被驱动时,定子绕组中的周期变化的脉冲电流转化为旋转磁场与转子磁场耦合,内联螺杆的转子旋转出力,可驱动与螺杆配合的螺母实现直线方向的前后运动[10]。调焦控制电路设计电路,产生周期变化的脉冲,周期改变励磁状态以驱动电机。直线电机控制原理图如图1所示。励磁状态改变的方向控制直线步进电机的正反转,直线步进电机控制输出转动如图2所示。

图1 直线电机控制原理示意图

图2 步进电机转动输出波形示意图
2 系统总体设计
2.1总体设计方案
测绘相机调焦控制检测系统的目的是准确采集两路调焦电路输出的控制驱动波形,并对采集到的两路波形进行分析对比,给出电机输出步数和方向并记录波形,为调焦电机控制提供检测和提供依据[11-13]。为实现该功能,系统包含两个部分,信号采集部分和数据处理部分。信号采集部分来采集调焦电路输出的控制波形;数据处理部分对采集的两路波形对比分析。系统框图如图3所示。
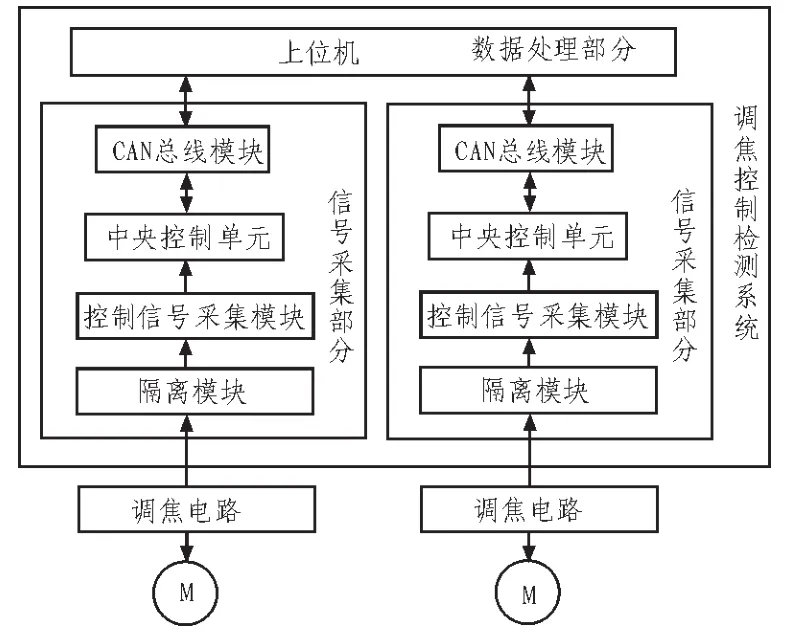
图3 测绘相机调焦控制检测系统图
2.2信号采集算法分析
调焦控制检测系统的最重要部分就是如何准确的采集调焦机构输出的控制信号。目前常规的波形检测方法为采样型信号检测方法,但是由于采样型信号检测方法的缺点,本文根据调焦电路的固有的控制特点,提出了一种新型的调焦电路控制波形检测方法--中断式信号采集方法。
1)采样型信号采集方法
根据香农采样原理,为了不失真的恢复模拟信号,采样频率应该不小于模拟信号频率中最高频率的2倍。即

若要采用这种方法,中央控制单元利用大于调焦电路输出的波形的频率2倍,将采集到的信号传送到上位机处理,采集方式如图4,中央控制单元定时读取调焦电路输出的电压电平,并在固定时间将采集到的电平传输到上位机进行处理,上位机用来恢复波形信号。
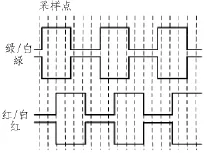
图4 采样信号采集示意图
在本项目中,直线步进电机输出控制频率在50~100 Hz,根据公式(1),要保证信号采集的完整性,采样频率不低于200 Hz。实验中,系统控制单元按照500 Hz采集信号,判断信号的高低状态,记录后传输到上位机,这种采集方式通用性较强,但是这种方案占用较多的控制单元的定时器、内存等资源,并且当信号采集时刚与信号上下跳动时重合,会判断不准确的现象,以致判断丢步。
2)中断式采集方式
根据直线步进电机驱动原理,直线步进电机的运动是靠信号给予的脉冲而产生的,即电机每走一步,都会有输出信号的变动[14-15]。利用调焦电路控制波形的特点,该系统采集点为信号变化的点,延时1 ms后采集信号电平。由于控制波形的频率最大为100 Hz,故可以准确采集信号的电平,采集示意图如图 5所示。这种控制方式并不需要频繁的占用定时器中断,当外部信号发生变化时,开启计时功能,并采集电平,而且不会出现在信号电平与采样时冲突的问题。该算法步进准确可靠,而且可以节省CPU资源。故采用该种方案来采集电机控制驱动信号。
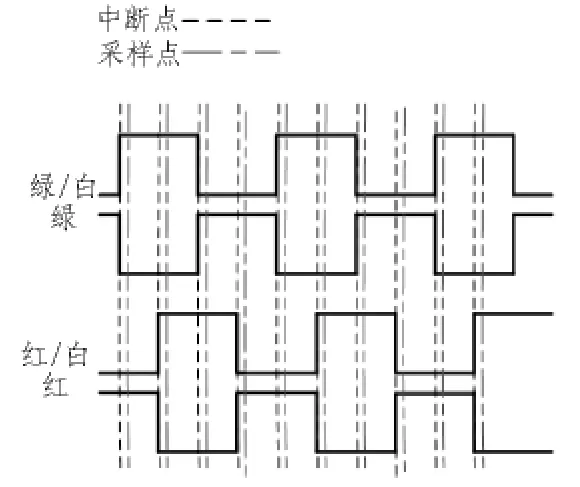
图5 中断式信号采集示意图
3 硬件电路设计
直线步进电机高电平信号幅度在5 V±5%之间;每相电流负载能力1.3 A。为了保护调焦电路,采用高速光电隔离器接收信号。信号收到后利用74LS14器件对信号波形进行整形,直接将信号送往中央控制单元。中央控制单元捕捉脉冲沿后延时采集信号电平。
硬件部分分为电源模块、调试模块、中央控制模块、信号隔离与整形模块、CAN总线通讯模块。
电源模块主要将5 V电源转换为CPU使用的3.3 V电源。电源将信号模拟地和数字地隔开。供电电路如图6所示。
调试模块为JTAG调试。为控制系统的成本和集成度,本文中央控制模块采用ARM-Cortex系列LPC1700为核心控制器,该芯片支持32路的外部IO中断,满足该信号的采集精度要求。
信号隔离与整形模块是采集的核心模块。保证信号采集的准确性并隔离保护调焦电路。在这里采用5 V高速光电隔离6N137器件,该芯片具有温度、电流和电压的补偿功能,高速的输入输出隔离,5 mA的极小输入电流。其中输入的正端接调教信号的5 V电压,负端接调焦驱动的控制端。采集到的信号通过反相器SN74HC14D进行整形后输入到单片机的外部中断口。电路设计如图7所示。
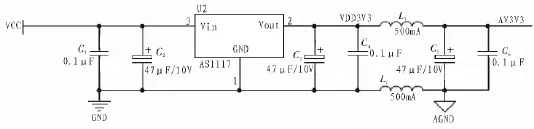
图6 系统电源模块电路图
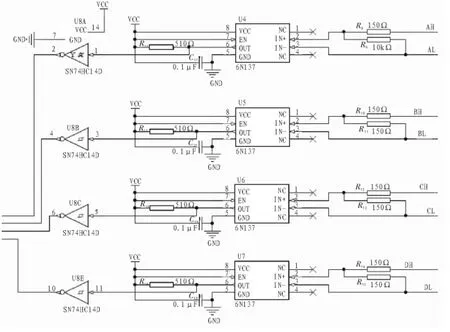
图7 信号隔离和整形模块电路图
CAN总线通讯模块,是将采集到信号处理后将信号的信息传输到上位机。LPC1700单片机内部含有CAN控制器,所以只要将CAN收发器CTM1050T与CAN总线接口的TXD 和RXD相连,就可以实现CAN通讯。
4 系统软件设计
系统软件设计包括嵌入式软件设计和上位机处理软件。
嵌入式软件主要是信号采集、信号处理和CAN总线通讯功能。具体框图如图8所示。
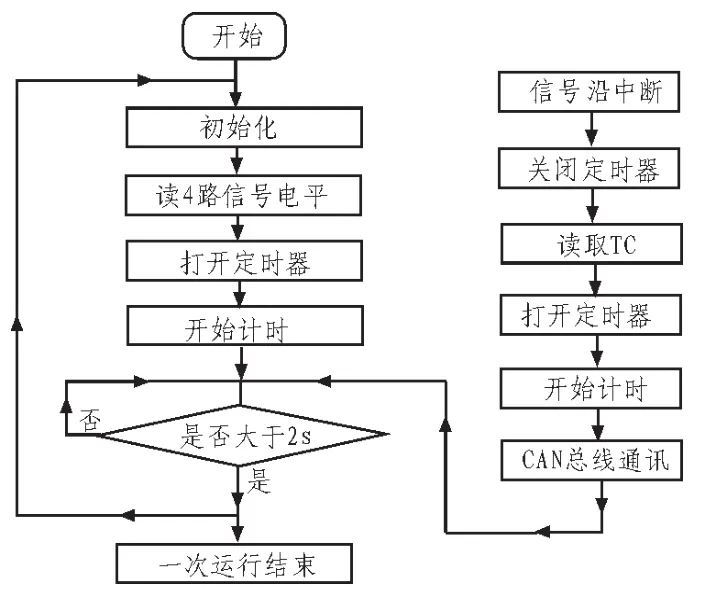
图8 嵌入式软件框图
上位机软件主要作用是处理信号功能,分析给出信号转动的步数和正转和反转,给出信号波形,并对两路调焦电路输出波形进行对比,反应调焦电路的控制精度。上位机利用Visual C++软件进行编程,屏幕包括开始测试,数据导出,转速和方向和步数的显示。
调焦装置的步数即为驱动波形变化次数,波形每次变化,电机运行一步,也就是上位机软件接收到一次CAN总线数据,步数N+1。当长时间(2 s)没有收到数据时,及认为电机停止转动。上位机停止计数并给计数器清零。
调焦装置的直线步进电机每步1.8°,时间间隔为ΔT,步数为N及电机的转速v如式(2):

转动方向的判断方式:
根据图2的对比,观测AB两项电压,若AB两项电压差为高,前半部分CD两项电压差为低,后半部分CD两项电压差为高,可以判断步进电机正转;若前半部分CD两项电压差为高,后半部分CD两项电压差为低,可以判断步进电机反转。
当电机转动停止后,上位机对比采集到的两路调焦控制信号,对比两路转动方向以及转动速度和步数,判断电机运行是否一致。为调焦电路精确控制直线步进电机提供依据。
5 案例分析
在实践应用中,连接调焦控制电路与调焦控制检测装置,采集调焦信号,调焦电路实际发送电机为64步,但是检测系统对对其中一路调焦电路检测到的信号为走了65步。对比两路调焦电路信号输出,并利用示波器对改路调焦电路输出信号进行分析。发现该路调焦控制电路在初始化过程中,将本来应该低电平信号拉高,发生错误。
6 结 论
实践证明测绘相机调焦控制检测系统体积小,成本低。并能准确检测到调焦控制电路对直线步进电机的控制信号,并能准确的对调焦控制信号进行分析。为调焦控制电路装置准确控制电机,全面掌握步进电机性能提供了有力的依据。
[1]唐新明,谢俊峰,张过.测绘卫星技术总体发展和现状[J].航天返回与遥感,2012,33(3):17-24.
[2]胡长喜,贾碉.直线步进电机在航空航天领域中的应用[J].导弹与航天运载技术,2008,298(6):45-48.
[3]何红艳,王小勇,曾湧.BERS-02B卫星高分辨率相机的在轨调焦方法[J].航天返回与遥感,2008,29(6):12-17.
[4]刘 威,航天相机快门装置地面检测系统研制[D].武汉:华中科技大学,2012.
[5]薛乐堂,陈涛,徐涛,等.一种高精度高可靠性调焦机构设计[J].长春理工大学学报,2012,35(2):9-11.
[6]王丽.电机驱动集成监测系统关键技术研究与应用[D].北京:中国科学院电工研究所,2006.
[7]金华松,孙永江,刘军,等.航天测量船伺服直流电机测试系统设计与实现[J].电机与控制应用,2013,40(3):53-56.
[8]翁睛,陈鲤文.直流电机监控闭环转速系统的实现[J].应用与设计,2007,6(6):3-5.
[9]刘爱萍.基于C8051F005单片机的两相混合式直线步进电机驱动系统的设计[D].内蒙古:内蒙古农业大学,2007.
[10]肖龙,汤恩生.电机控制系统PID参数的遗传算法优化[J].航天返回与遥感,2006,27(2):34-37.
[11]李治强.基于DSP的直线步进电机控制系统的研究[D].济南:山东轻工业学院,2011.
[12]陈洪达,陈永和,史婷婷,等.空间相机调焦机构误差分析[J].光学精密工程,2013,21(5):1350-1355.
[13]范磊磊,庹先国,王洪辉,等.L297+L298芯片在步进电动机中的应用[J].微特电机,2012,40(10):58-61.
[14]肖龙,杨佩君,汤恩生.基于软件锁相环的电机速度控制系统[J].航天返回与遥感,2006,27(3):41-46.
[15]王智,张立平,李朝辉,等.传输型立体测绘相机的调焦机构设计[J].光学精密工程,2009,17(5):1052-1055.
The design of focusing-circuits-controlling detecting system on mapping camera
HOU Dan,CHEN Lei,HE Xin
(Beijing Institute of Space Mechanics&Electricity,Beijing 100094,China)
With the development of aerospace and information technology,high-resolution mapping camera has become important way to detect geography information.The resolution of focusing circuit affects the image quality of mapping camera. In order to control the resolution of focusing circuit,the paper brings out a system which can detect and monitor the wave of focusing circuit.And introduce the principle,the way of collecting signal.The paper also introduce constitutes of the system and how to design software and hardware.Experiments prove that this system gives reliable basis for exactly controlling the focusing circuit.
mapping camera;focusing-controlling;linear stepping motor;monitor and detection
V19
A
1674-6236(2016)22-0164-04
2015-11-20稿件编号:201511199
侯 丹(1985—),女,辽宁绥中人,硕士,工程师。研究方向:遥感器设计。
