一种基于TIN的LiDAR点云滤波算法
2016-12-05岳桂昌周玉娟
岳桂昌 周玉娟
(河南省电力勘测设计院,河南郑州 450000)
一种基于TIN的LiDAR点云滤波算法
岳桂昌 周玉娟
(河南省电力勘测设计院,河南郑州 450000)
在一定范围内地面可以近似看成一个个小平面的前提下,提出一种基于TIN的LiDAR点云滤波算法。先通过多尺度虚拟网格来筛选地面种子点,然后经过TIN向下加密和向上加密两个过程来进一步筛选出地形点;最后,通过3组具有不同典型地物特征的测区数据进行试验,验证该算法的实用性和有效性。
点云滤波;虚拟格网;TIN加密
激光雷达(Light Detection and Ranging,简称Li⁃DAR)是一种新型的快速获取地表信息的主动式遥感技术,具有非接触、高效率等其他传统遥感技术所无法比拟的优点[1]。目前该技术已广泛应用到城市测量、电力线勘测、森林管理、海岸线保护及地质灾害检测等多个领域[2]。
尽管目前点云获取技术已臻完善,但配套的后续数据处理依然相对薄弱,尤其是点云滤波,要耗费整个数据后续处理60%~80%的时间[3]。因此,探索快速高效的点云滤波算法是非常有意义的。现有的点云滤波算法总体来说,主要分为形态学法、移动窗口法、基于地形坡度法、迭代线性最小二乘内插法等。这些算法大多都是基于三维激光脚点的高程突变等信息进行的。
Lindenberger[4]最早提出了点云的一维形态学滤波算法,该算法要求数据必须是一维有序的,故局限性很大。Keqi Zhang等[5]采用了变窗口大小的渐进形态学运算对此方法进行了改进,该改进算法具有较好的鲁棒性,但其中的一些阈值参数是事先通过多组试验获得的经验值。Kilian等[6]利用一个移动窗口,依据窗口大小赋予点一定权重,最后根据各个地面点权重插值生成DEM。Petzold等[7]则采用逐步缩小窗口尺寸的方法渐次滤除非地面点。Vosselman[8]提出了一种类似于形态学运算的基于地形坡度的滤波方法,利用一个状如倒置漏斗或圆锥的操作元进行地面点滤除。Sithole[9]改进了该算法,采用圆锥形的操作元,利用局部最低点的边坡梯度来控制圆锥的倾斜角,以适应地形坡度的变化。迭代线性最小二乘内插法最早是由Kraus[10]提出的,其理论依据是最小二乘内插后,数据点拟合后的高程残差不服从正态分布,比地面点高的地物点高程拟和残差为正值,且一般有较大偏差。
本文在分析传统滤波算法优劣的基础上,提出一种基于TIN的点云滤波算法,并通过3组具有不同地形特征的测区数据进行试验,证明该算法的实用性和有效性。
1 算法实现
1.1 多尺度虚拟格网筛选地面种子点
Cho、Jwa等[11]在利用LiDAR点云数据对建筑物进行
探测和重建时,引入了虚拟网格的概念,克服了其他数据组织形式效率低下和精度损失的缺点。虚拟网格示意图如图1所示。

图1 虚拟格网示意图
虚拟格网在o-xy平面的投影如图2(a)所示,图2(b)为多尺度虚拟网格的平面示意图,方格填充线条由粗到细代表虚拟网格尺度由大到小。

图2 多尺度虚拟格网平面投影图
为了得到概率最大地面种子点,本文采用由大到小的网格尺度来进行逐级筛选。具体来讲,先在最大尺度网格中选取最低点,然后以这些点为基准,采用坡度阈值对下一级尺度的种子点进行审核筛选。经过筛选后的这一级地面种子点再作为基准继续筛选下一级尺度的地面种子点,直到得到最小尺度网格中的地面种子点。
坡度阈值的计算公式如下:

式(1)中,gradient表示下级待定最低点与上级种子点的坡度;dz表示下级待定最低点与上级种子点的坐标差。当下级待定最低点与上级种子点的坡度小于给定阈值时,下级待定最低点就标记为种子点,反之则标记为待分类点。为了保证得到的种子点确实为地面点,本文坡度阈值设置的比较小,为10°。
利用多尺度虚拟格网筛选出的地面种子点及一个包含全部点云的矩形顶点,构建初始的TIN模型。
1.2 TIN向下加密
这一步骤的目的是获取纯粹地形的初始表面模型。利用1.1形成的初始TIN模型,搜索位于每个TIN三角面下的最低点,标记为“地形点”,并用于更新三角网。这个过程一直重复直至最后形成的三角网下面不存在任何点,如图3所示。这个最后形成的三角网即是我们假设的地形的初始表面模型。
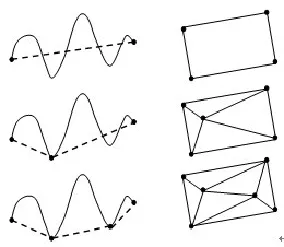
图3 TIN向下加密示意图

式(2)中,d为点到其基面三角面的距离;(x,y,z)为待标记点坐标;参数A、B、C、D为三角网3个顶点所确定的平面方程参数。为最大限度地避免将非地面点标记为“地面点”,本文所采用的距离阈值为0.5m。
2 试验结果与分析
2.1 试验数据
本文选用的数据是由Optech ALTM扫描仪获取的Vaihingen/Enz试验区和Stuttgart市中心的数据[12]。为了方便对滤波效果进行评价,在OEEPE的许可下,通过人机交互的方式,对这些数据进行了手动人工分类。表1为所选3个区域的概况。
1.3 TIN向上加密
1.2 形成的三角网只是一个粗略的地形表面模型,还有一部分真实的地形点没有包含在该三角网内。为了进一步筛选出这些点,完善地形表面模型,需要对TIN进行向上加密。在向上加密过程中,本文采用距离限制法则来迭代进行加密。具体来讲,先利用已生成三角网的3个顶点求出其平面坐标,然后计算垂直投影在该三角面内的点到该面的距离,小于阈值的点则标记为“地形点”,并用于更新三角网。这个过程一直重复直至最后形成的三角网上面该阈值范围内不存在其他点。
距离限制法则的数学表达式如下:
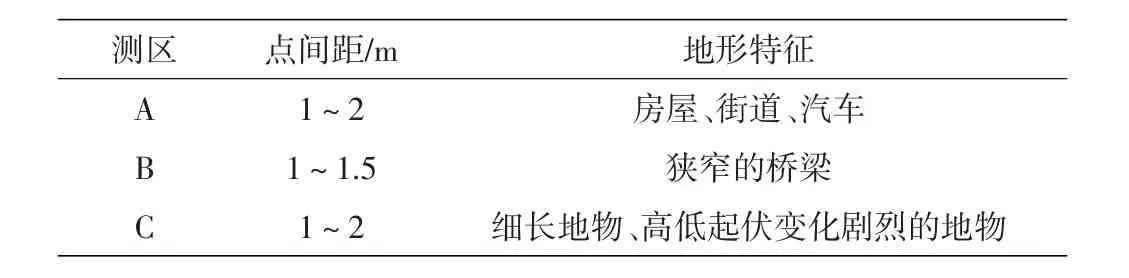
表1测区概况
2.2 精度评定
本文采用George Sithole[13]提出的滤波误差来体现。
滤波误差主要分为以下三类:Ⅰ类误差、Ⅱ类误差、总误差(见表2)。Ⅰ类误差是将地面点错误地归为地物点,即拒真误差;Ⅱ类误差是将地物点错误地归为地面点,即纳伪误差;总误差是对前两类误差加权求和后得到的。Ⅰ、Ⅱ类误差反映了算法的适应性,为了得到更高精度的数字地面模型,一般要尽量降低Ⅱ类误差;总误差体现了算法的可行性,总误差越小,滤波精度越高。
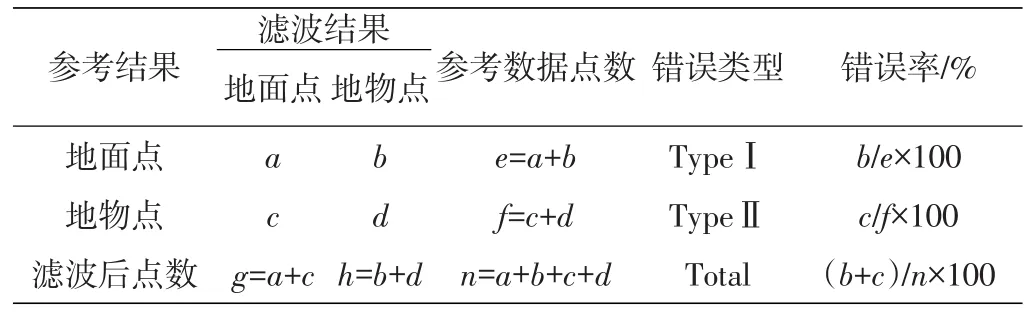
表2误差统计
表2中,a表示正确分类的地面点数目;b表示把地面点误归类为非地面点的点数;c表示把非地面点误归类为地面点的点数;d表示正确分类的非地面点数目。
2.3 试验结果
图4为3个测区人工分类与本文算法分类结果的效果图。表3列出了3个测区的误差统计。


图4 滤波效果图
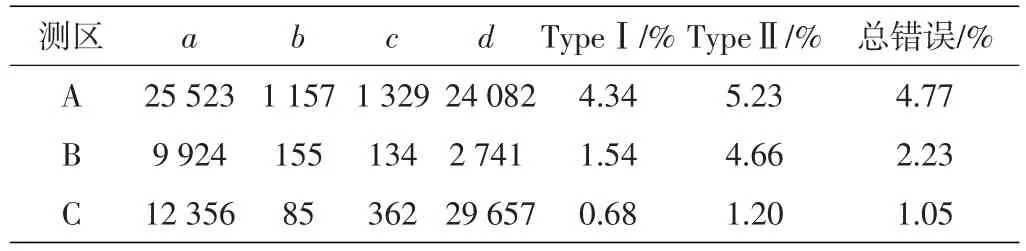
表33个测区的误差统计结果
2.4 结果分析
从3组具有不同典型地物特征的测区滤波效果图来看,本文所采用的滤波分类方法,不管是在建筑物密集的城镇区域,还是在植被桥梁分布的郊区,效果都比较理想,Ⅰ、Ⅱ类误差分布均匀,且数值较小,最大误差也没有超过6%,能够对绝大部分地面点和非地面点进行正确分类。尤其是在地物点与地面点高差悬殊较大的区域(如测区C),各类误差均能降低到1%左右。但在房屋密集区域(如测区A),尤其是一些建筑物、桥梁边缘,由于其往往与周边地面点有粘连或高程较接近,较易出现错误分类。
总体来讲,本文提出的滤波算法,能够正确区分出大部分的植被、建筑物、桥梁,保留显著的地形特征,较准确地提取出地形点。
3 结论
本文在一定范围内地面可以近似看成一个个小平面的前提下,基于TIN,引入多尺度虚拟网格来筛选地面种子点,并通过TIN向下加密和向上加密两个过程来进一步筛选出地形点。结果表明,本文提出的算法结构简单,算法稳定,可以有效滤除建筑物、植被、桥梁等地物点,具有一定适用性。不足之处是本文点云滤波算法本质上是基于高程突变这一特点进行分类的,在处理特殊地形如陡坎、沟堑、断裂线时,存在明显缺陷。因此,更加可靠、高效、智能的自适应滤波分类方法仍值得进一步研究与开发。
[1]罗志清,郝力,李琦.城市空间框架数据研究[J].地理与地理信息科学,2004(4):15-18.
[2]张熠斌.机载LiDAR点云数据处理理论与技术研究[D].西安:长安大学,2010.
[3]Sithole G,Vosselman G.Experimental comparison of filter algorithms for bare-earth extraction from airborne laser scanning point clouds[J].ISPRS Journal of Photo-grammetry&Remote Sensing,2004(59):85-101.
[4]Lindenberger J.Laser-profilmessungen zur topographisch⁃en Gelaedeaufnahme[D].Stuttgart:Universitat Stuttgart,Verlag der Bayerischen Akademie der Wissenschaften,l993.
[5]Zhang KQ,Shu CC,Dean W,et al.A Progressive Morpho⁃logical Filter for Removing No ground Measurements From Air⁃ borne LIDAR Data[J].IEEE Transactions on Geoscience&Remote Sensing,2003(4):872-882.
[6]张小红.机载激光雷达测量技术理论和方法[M].武汉:武汉大学出版社,2007.
[7]Petzold B,Reiss P,Stoessel W.Laser Scanning-Survey⁃ing and Mapping Agencies are Using a New Technique for the Deri⁃vation of Digital Terrain Models[J].ISPRS Journal of Photogramme⁃try&Remote Sensing,1999(2-3):95-104.
[8]Vosselman G.Slope Based Filtering of Laser Altimetry Da⁃ta[J].International Archives of Photogrammetry&Remote Sensing,2000(B3):935-942.
[9]Sithole G.Filtering of Laser Altimetry Data Using a Slop Adaptive Filter[J].International Archives of the Photogrammetry& Remote Sensing,2001(XXXⅣ):203-210.
[10]Kraus K,Pfeifer N.Determination of Terrain Models in Wooded Areas with Airborne Laser Scanner Data[J].ISPRS Journal of Photogrammetry&Remote Sensing,1998(4):193-203.
[11]Chow,Jwa YS,Chang HJ,et al.Pseudo-grid based build⁃ing extraction using airborne LIDAR data[C]//Istanbul:20th IS⁃PRS Congress,2004.
[12]OEEPE.Working Group on laser data acquisition[EB/ OL].(2004-01-22)[2016-09-06].http∶//www.terra.geomatics.kth. se/~fotogram/OEEPE/ISPRS_Amsterdam_OEEPE_presentation.pdf.
[13]George S,George V.Experimental Comparison of Filter Algorithms for Bare-Earth Extraction from Airborne Laser Scan⁃ning Point Clouds[J].ISPRS Journal of Photogrammetry&Remote Sensing,2004(59):85-101.
LiDAR Point Cloud Filtering Algorithm Based on TIN
Yue GuichangZhou Yujuan
(Henan Electric Power Survey&Design Institute,Zhengzhou Henan 450000)
Under the premise that the ground can be approximated as a small plane within a certain range,an algo⁃rithm of point cloud filtering which is based on TIN was presented.First,multi scale virtual grid was firstly selected to screen the ground seed points,and then the terrain points was further screened out after two process of TIN down and up encryption;Finally,the experiment was carried out by using the data of three groups with different typical fea⁃tures,to verify the practicability and validity of the algorithm.
points cloud filtering;pseudo-grid;TIN encryption
P237
A
1003-5168(2016)10-0043-04
2016-09-10
岳桂昌(1988-),男,硕士,工程师,研究方向:LiDAR数据在电力系统中的应用。
