基于神经网络的驾驶员制动意图辨识方法研究
2016-12-03崔高健李连京李绍松涂永发
崔高健+李连京+李绍松+涂永发
摘 要:近年来随着汽车技术和汽车制造业的快速发展,汽车拥有量快速增加,交通状况变得更加错综复杂、交通事故频发。由此,汽车主动安全性的重要性越来越凸显,逐渐成为当今汽车行业的发展趋势。而制动系统作为汽车主动安全性能中最为重要的环节,被越来越多的研究人员关注[1]。文章基于神经网络方法建立驾驶员制动模式辨识模型,对电机-低、电机-高、紧急制动、SOC阈值等四种制动模式进行辨识,得到高精度驾驶员制动模式辨识模型,通过模糊神经网络方法,验证了驾驶员制动意图辨识方法的有效性。
关键词:制动意图;神经网络;模型辨识
引言
近年来随着汽车技术和汽车制造业的快速发展,汽车拥有量快速增加,交通状况变得更加错综复杂、交通事故频发。因此,越来越多的研究人员把侧重点放在了汽车的主被动安全上,意在于提高汽车的安全性。这几年,线控驱动系统成为了研究热门,线控驱动系统包含线控制动系统、线控转向系统、线控油门系统等。它的导线走向布置非常灵活,所以汽车的操纵部件也不用死板的排放,汽车底盘实现了集成控制,扩大了汽车的自由空间。这项技术是利用传感器来感受驾驶意图,通过导线将意图传给中央处理器,经中央处理器处理后,它给相应的执行系统发送指令,以便完成驾驶员的各项操作。可见对线控驱动系统来说,必须要靠驾驶员的驾驶行为实时、准确辨识出驾驶员的驾驶意图,才能实现对线控汽车的准确控制。
1 制动意图解析[2]
文章提出对制动踏板的智能解析实现对踏板开度及变化率的综合分析,同时对两组数值进行模糊化处理[3],构建模糊规则获得所需制动力矩,实现更佳的制动性能。
首先,所需制动力矩分别采用制动踏板开度与制动踏板开度变化率构建模糊规则[4]。我们将制动踏板开度设为L,开度变化率设为d L,制动减速度设为V。确定输入变量的区间:踏板开度从零到全开;根据每个制动工况获得的试验数据,将踏板开度变化率取为每秒中-10到150个开度。将制动踏板开度及其变化率进行模糊化。导入基于Matlab调出的FIS编辑器中,设定为二维Sugeno型模糊系统。并编辑隶属度函数为高斯函数并通过模糊规则编辑器编辑相关模糊规则[5],而后生成FIS输出曲面,得到所需制动力数据。
基于汽车制动系统硬件在环试验平台中所使用的电机模型绘得的电机外特性曲线得到最大电机制动力矩;基于汽车制动系统硬件在环试验平台中SOC测量装置实时监测到的SOC值。将所需制动力数据、SOC值数据作为相关样本数据。把所需制动力矩数据、最大电机制动力矩数据、SOC阈值数据经过均值滤波去噪处理后;将所需制动力矩、SOC值分别进行模糊化处理;其中所需制动力矩数据、SOC值分别构建大、中、小三个模糊子集。
将相关样本数据模糊化处理后,所述的相关样本数据包括:所需制动力数据、车速数据、SOC值数据;导入ANFIS编辑器,应用零阶Sugeno模糊神经网络模型进行离线辨识,隶属度函数为高斯函数,并规定每个输入有三个节点,即每组数据的三个模糊子集,各模糊子集各模糊子集相互组合之后在辨识模型中获得27条模糊规则[6];在此基础上利用反馈方式进行训练,调整误差公差为0.001,训练次数为1500次,最终得到驾驶员制动模式辨识模型;对驾驶员制动模式辨识模型输入所需制动力、SOC阈值信息,可以输出量化的制动模式,即输出数字1代表电机-低模式,输出数字2代表电机-高模式,输出数字3代表紧急制动模式,输出数字4代表SOC阈值模式。
电机-低模式是当SOC值正常时,所需制动力小于电机最大制动力矩的时候,使用再生制动;电机-高模式是当SOC值正常时,所需制动力大于电机最大制动力矩的时候,使用再生制动和机械制动混合的混合制动力矩;紧急制动模式是当电机宕机时使用纯机械制动;SOC阈值模式是当超级电容或蓄能器电量达到一定阈值的时候,采用放电模式即机械制动。
2 制动意图辨识
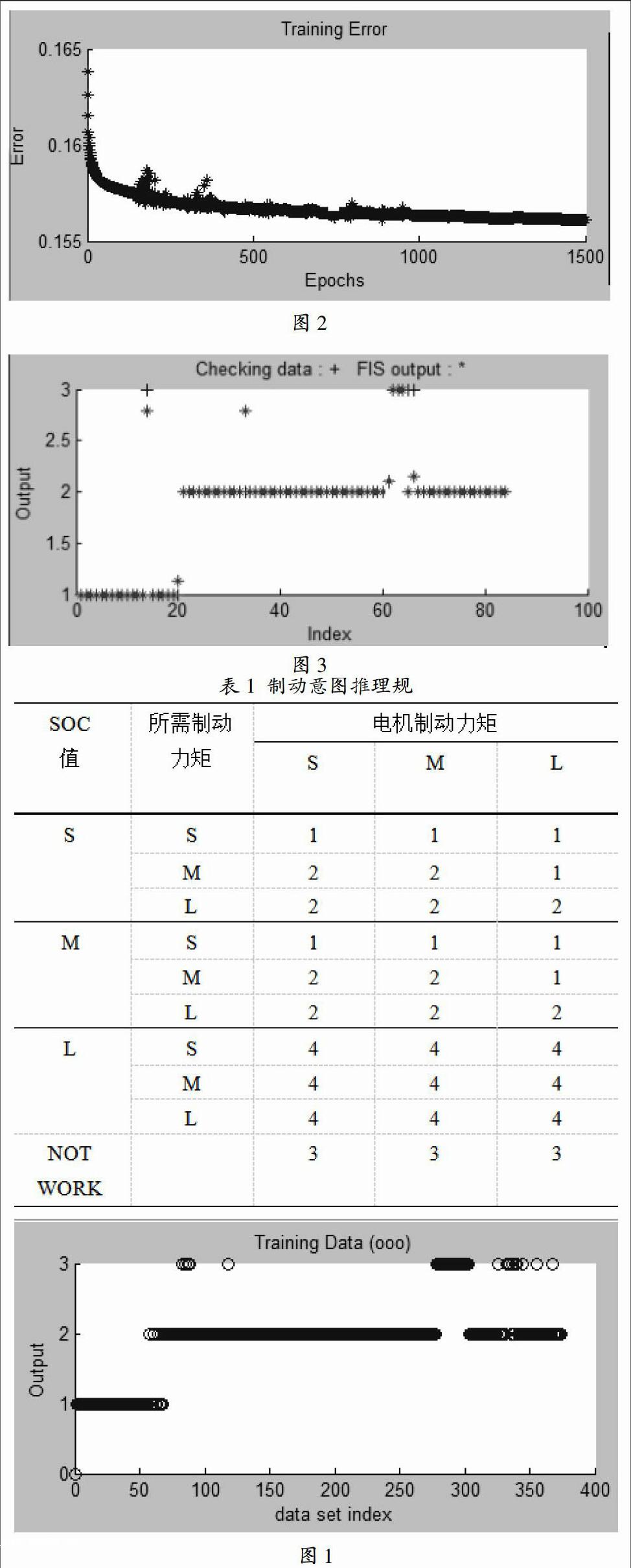
我们利用模糊神经网络方法进行驾驶员制动意图辨识[7]。利用制动踏板与dSPACE连接搭建乘用车模拟器,通过dSPACE与CarSim&Simulink软件联合仿真,进行了电机-低、电机-高、紧急制动、SOC阈值等4种制动模式模拟试验。通过对测得参数进行筛选,最终选择了制动踏板开度及其变化率、电机最大转矩和SOC阈值四个特征参数作为驾驶员制动意图辨识模型的输入。最后,利用Matlab中的ANFIS编辑器建立制动意图辨识模型并进行训练。以最大相似性原则对数据进行归类,输出量化的制动意图。制动意图推理规则如表1所示。
3 制动意图辨识方法的验证
在Matlab命令行输入“anfisedit”,进入ANFIS编辑器,依照ANFIS的工作流程,将分类好的训练数据与检验数据导入编辑器中,如图1。
由于是单输出,所以我们设定一个零阶Sugeno模糊神经网络模型,规定每个输入有三个节点,隶属度函数的类型为高斯函数(gaussmf),得到模糊神经网络模型结构图。
根据以上关系设定,辨识模型共有27条模糊规则,每一条都可以用“If A and B and C then D”这样的条件语句来表示。我们将训练方式设置成反馈方式,误差公差为0.001,训练次数1500次,经过训练后输出的误差为0.156,如图2所示,误差在范围内,满足要求。
得到的检验结果如图3所示。
从图3中可以看出输出值与真实值二者之间的微小差异对意图辨识不会造成很大影响,由此可以得出,经模糊神经网络训练的模型系统可以辨识驾驶员不同的制动意图。
根据获得的数据,选取了所需制动力、SOC值和电机制动力矩作为辨识参数。利用Matlab中的ANFIS编辑器建立了意图辨识的模型,并对其进行了训练,经过检验数据检验,对比结果满足精度要求范围,进而得到了准确的制动意图辨识模型。
4 结束语
文章对经典制动工况的分析归纳总结为更新更适用于电动车的制动模式,采用模糊神经网络方法并进行训练。以最大相似性原则对数据进行归类,输出量化的制动意图并进行验证。结果验证辨识方法的准确性以及辨识模型的有效性。辨识驾驶员制动意图可以实现很多功能,文章只是对方法的有效性进行了验证,并未将其与其他系统结合应用。以后的研究者可以将其作为制动力分配的基础,根据辨识的意图,合理的进行制动力分配,保证汽车的安全性。
参考文献
[1]王畅.基于隐形马尔科夫模型的驾驶员意图辨识方法研究[J].长春:吉林大学,2011.
[2]王俊,陈慧勇.混合动力车辆中的加速与制动意图识别[D].吉林大学学报,2014.
[3]彭晓燕,董晓丹,章兢.汽车线控制动系统的可靠性分析和容错技术研究[J].汽车工程,2009,31(7):624-628.
[4]王英范,宁国宝,余卓平.乘用车驾驶员制动意图辨识参数的选择[J].汽车工程,2011,33(3):213-217.
[5]李弼程,邵美珍,黄洁.模式辨识原理与应用[M].西安:西安电子科技大学出版社,2008:121-140.
[6]王玉海,宋健,李兴坤.基于模糊推理的驾驶员意图辨识研究[J].公路交通科技,2005,22(12).
[7]Filev D, Lu J B, Asante K P, et al. Real-time Driving Behavior Identification Based on Driver-in-the-loop Vehicle Dynamics and Control[C]. Proceedings of the 2009 IEEE International Conference on Systems, Man, and Cybernetics, San Antonio TX USA, 2009.
作者简介:崔高健(1970-),男,汉族,吉林长春,博士,教授,就职于长春工业大学,研究方向:车辆动力学与控制。
李连京(1990,12-),男,汉族,吉林长春,硕士研究生,就职于长春工业大学,研究方向:机械工程。