一种改进Fuzzy-PID技术的飞行器姿态控制系统设计*
2016-12-02马晓爽石征锦
马晓爽,石征锦
(沈阳理工大学 自动化与电气工程学院,辽宁 沈阳 110159)
一种改进Fuzzy-PID技术的飞行器姿态控制系统设计*
马晓爽,石征锦
(沈阳理工大学 自动化与电气工程学院,辽宁 沈阳 110159)
为了克服飞行器模型不精确以及在飞行过程中各种随机因素带来的干扰,提高飞行器姿态控制精度和稳定性能,提出了一种改进的Fuzzy-PID技术飞行器姿态控制系统,并进行数学仿真。根据姿态角大小决定采用Fuzzy控制或PID控制。同时,在Fuzzy控制器中引入自动修正因子n对模糊控制器的参数进行在线修改,增强参数在线自调整能力。实验仿真结果表明该方法能够迅速减小姿态角偏差,改善系统的动态响应特性,提高飞行器自适应能力。
模糊控制;PID控制;飞行器姿态;修正因子
0 引言
飞行器在大气层内的运动具有非线性、强耦合、不确定等特性,难以建立精确的数学模型,并且易受风干扰等随机干扰的影响,气动参数变化剧烈。因此,设计一个可靠的飞行器姿态控制系统是保证使其按预定轨迹运动的必要条件。目前应用较普遍的飞行器姿态控制技术是采用PID控制,简单可靠,性能稳定。但在某些恶劣环境下,对飞行器的姿态控制精度和稳定性要求较高,仅靠PID或改进的PID控制技术难以满足。
因此,本文将 PID控制和Fuzzy控制结合起来应用在飞行器姿态控制系统中。Fuzzy控制是一种仿人思维的智能控制方法,不依赖于精确的数学模型,可以较好地解决由于飞行器模型不精确和随机干扰引起的控制问题。但Fuzzy控制很难解决系统本身存在的稳态误差,PID控制正好能够弥补这一不足。同时,为了改善Fuzzy控制器的性能,加入自动修正因子对其参数进行在线调整,保证控制系统能在大范围内获得最优的动态性能。
1 Fuzzy-PID控制器设计
1.1总体设计
Fuzzy-PID控制的基本原理如图1所示。

图1 Fuzzy-PID控制基本原理图
控制系统由两部分组成:Fuzzy控制器和 PID控制器。选取误差和误差变化率作为系统输入,输出为系统控制量u。控制系统根据偏差e的大小来决定采用何种控制算法。当误差过大或较大时,采用 Fuzzy控制算法,加大控制作用抑制超调,提高系统的响应速度,使系统实际响应尽快达到给定值;反之,采用 PID控制算法,减小系统稳态误差,改善静态特性。它比单独Fuzzy控制或者PID控制都有更好的控制性能。PID控制器的设计在本文不再赘述。
1.2带自动修正因子的Fuzzy控制器设计
在设计Fuzzy控制器的过程中,主要分为5个部分[1]:(1)确定模糊控制器的结构;(2)合理地选择量化因子和比例因子,从而确定输入变量及输出变量的论域;(3)确定输入、输出的模糊语言值以及隶属函数;(4)建立模糊规则并选定近似推理算法;(5)确定解模糊方法。其中根据操作人员积累的知识经验,建立模糊控制规则是最为核心的工作,Fuzzy控制器的性能好坏主要取决于此。
设输入量e、ec和输出量u的论域分别为E、EC和U,其模糊子集通常用{负大(NB),负中(NM),负小(NS),零(0),正小(PS),正中(PM),正大(PB)}来表示。选取控制量的一般原则是:当误差大或较大时,选取控制量以尽快消除误差为主;当误差较小时,选择控制量要以系统的稳定性为主,防止系统超调。根据知识经验加以总结得到模糊控制器的控制规则,见表1。

表1 模糊控制规则表
设偏差e和偏差变化率ec的量化因子分别为K1和K2,控制量 U的比例因子为 K3,它们在很大程度上影响模糊控制器的性能。K1越大,系统的超调量越大,过渡过程也越长;反之,则系统变化越慢,稳态精度降低。K2越大,系统超调量越小,输出变化率越小,但系统变化越慢;反之,则系统反应加快,但超调增大。K3主要影响系统的动态性能,与实际控制对象有关。
在实际工作中为了使系统快速响应,减小超调,在常规模糊控制器上引入修正因子n,在控制过程中对n值作调整,实时在线改变偏差E和偏差变化率EC的加权程度,从而取得更优的控制效果。
设模糊化的变量为 N,模糊集为{AB,AS,OK,CS,CB},子集中元素分别代表高放、低放、不变、小缩、大缩;加入修正因子n经调整后得到新的量化因子、比例因子 M1=nK1、M2=nK2、M3=K3/n。其调整原则是:当 e和 ec较大时,选取较大的控制量,即增大 M3、减小 M1和 M2,减小偏差、加快动态响应;当e和ec较小时,即系统接近稳态值时,应减小 M3,增大 M1和 M2,减小超调量、提高系统稳定性。因此,随着e和ec的变化,修正因子n实时自动调整。依据经验,得到修正因子n调整规则表如表1所示。
2 飞行器姿态控制系统
典型的飞行器姿态控制系统分别对纵向、横侧向、航向三个通道进行协调控制。本文以某飞行器为例,采用带自动修正因子的Fuzzy-PID控制方法对飞行器三个通道进行设计。对于俯仰通道,Fuzzy-PID控制器的输入为eφ=Δφ,=Δ,偏航通道 Fuzzy-PID控制器的输入为eΨ=ΔΨ,=Δ,滚转通道,Fuzzy-PID控制器的输入为eγ=Δγ,=Δ,俯仰舵偏 δφ、偏航舵偏 δΨ、滚转舵偏 δγ为系统控制量。控制目标是尽可能提高飞行姿态的控制精度和稳定性,消除姿态角偏差,克服随机干扰。三通道Fuzzy-PID控制器结构如图2所示。

图2 三通道Fuzzy-PID控制结构图
Fuzzy控制器中,选取输入变量的论域为E,EC={-5,-4,-3,-2,-1,0,1,2,3,4,5};控制量 U的论域 U= {-3,-2,-1,0,1,2,3}。其模糊子集为{NB,NM,NS,ZO,PS,PM,PB}。模糊控制规则表如表1所示。修正因子n的论域为{1/4,1/2,1,2,4},其模糊子集为{AB,AS,OK,CS,CB}。修正因子n调整规则表和隶属表分别如表2和表3所示。
3 数学仿真
在MATLAB7.0/Simulink环境下,采用上述设计的带修正因子的 Fuzzy-PID控制系统应用到飞行器俯仰、横侧、航向三通道的姿态控制中,并进行数学仿真。系统仿真框图如图3所示。图4给出了俯仰舵偏、俯仰角速率、迎角及俯仰角的仿真结果。图5给出了偏航舵偏、侧滑角、偏航角速率以及偏航角的仿真结果。图6给出了滚转舵偏、侧滑角、滚转角速率以及滚转角的仿真结果。

表2 修正因子n调整规则表

表3 修正因子n隶属表

图3 系统仿真框图

图4 俯仰通道仿真曲线
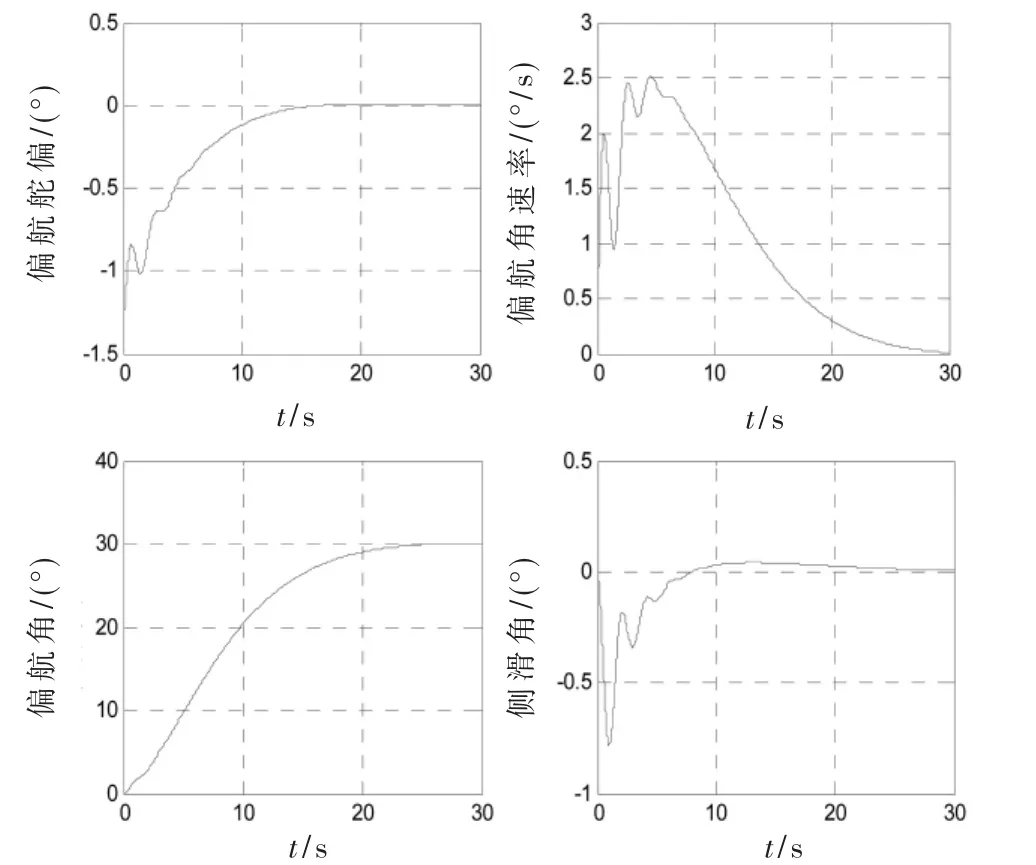
图5 偏航通道仿真曲线

图6 滚转通道仿真曲线
设俯仰初始姿态角偏差为5°,偏航通道预定偏航角度为30°,滚转初始姿态角偏差为5°。从系统仿真结果中可知,在初始阶段姿态角偏差较大时,飞行器姿态控制系统切换到模糊控制,控制量输出较大,各通道均能够在13 s之内使姿态角偏差迅速减小至稳态附近,姿态角速度在允许的范围内,取得较好的控制效果。当姿态角偏差在零附近或较小范围变化时,飞行器姿态控制系统切换至PID控制,三通道的姿态角稳态精度均控制在5%以下,很好地解决了各种随机干扰以及模型不精确等因素带来的稳态误差。由此可以看出本文提出的控制方法集Fuzzy控制的优点和 PID控制的优点于一体,能够迅速减小姿态角偏差,具有很好的控制性能。
为了验证本文所提带自动修正因子的 Fuzzy-PID控制方法的准确性,本文以俯仰通道为例,与常规 Fuzzy-PID控制进行了对比,如图4所示。在同一坐标系下,可看出纵向控制系统在引入自动修正因子n后,俯仰姿态角的调节时间和超调量都有大幅度减小,系统响应时间提高了20%,超调量减小了85%;系统过渡过程更加平稳,俯仰角速率的峰值也有所减小。由此可知带自动修正因子的Fuzzy-PID控制能够有效改善飞行器姿态角的动态响应特性,比常规Fuzzy-PID控制更能适应飞行器复杂飞行环境的要求。
4 结论
本文将Fuzzy控制和 PID控制相结合,设计了带自动修正因子的Fuzzy-PID控制系统,并将其应用到飞行器姿态控制系统中。从仿真结果中可以看出该控制方法可以快速减小姿态角偏差。同时,为了改善模糊控制器的控制性能,利用修正因子对模糊控制器的参数进行实时在线修改,增强了参数在线自调整能力,稳态误差在5%以下,在抗干扰方面具有很好的效果,具有较强的自适应能力。
[1]诸静.模糊控制原理与应用[M].北京:机械工业出版社,2005.
[2]刘朝英,宋哲英,宋雪玲.MATLAB在模糊控制系统仿真中的应用[J].计算机仿真,2001,18(3):11-14.
[3]SALIH A L.Modelling and PID controller design for a quadrotor unmanned air vehicle[J].IEEE AQTR.,2010,39 (5):697-699.
[4]陈向坚.微型飞行器姿态的智能控制方法研究[D].长春:中国科学院研究生院(长春光学精密机械与物理研究所),2012.
[5]吴森堂,费玉华.飞行控制系统[M].北京:航空工业出版社,2006.
[6]彭晓华,屠兴汉.求解模糊非线性系统[J].辽宁工程技术大学学报:自然科学版,2010,29(5):776-780.
[7]张义捷,钟友武,许得军.基于模糊控制技术的飞行器姿态控制系统设计[J].航天控制,2013(2):28-32.
[8]汪书苹,赵争鸣.带修正因子模糊PID控制的 PMSM交流伺服系统[J].清华大学学报(自然科学版),2007(1):9-12.
An improved Fuzzy-PID technology of vehicle attitude control system design
Ma Xiaoshuang,Shi Zhengjin
(Institute of Automation and Electrical Engineering,Shenyang Ligong University,Shenyang 110159,China)
In order to overcome the inaccuracy of vehicle model and all kinds of random factors in the process of flight of interference,improve the accuracy of vehicle attitude control and stable performance,an improved Fuzzy-PID technology of vehicle attitude control system is proposed,and mathematical simulation is conducted.Decide to adopt PID control or Fuzzy control according to the size of attitude angle.At the same time,introduce the automatic tuning factor n in the Fuzzy controller to modify parameters of the Fuzzy controller on-line,enhance self-tuning capabilities of the parameter online.Experimental simulation results show that the proposed method can eliminate the attitude angle deviation rapidly,improve the static and dynamic characteristics of the system, improve adaptive ability of the vehicle.
fuzzy control;PID control;vehicle attitude;tuning factors
TP272
A
10.16157/j.issn.0258-7998.2016.10.004
国家自然科学基金(51377110)
2016-06-28)
马晓爽(1992-),女,硕士研究生,主要研究方向:智能控制和导航。
石征锦(1963-),通信作者,男,硕士,教授,主要研究方向:智能信息处理、自主飞行控制,E-mail:2469551667@qq.com。
中文引用格式:马晓爽,石征锦.一种改进 Fuzzy-PID技术的飞行器姿态控制系统设计[J].电子技术应用,2016,42 (10):21-23,28.
英文引用格式:Ma Xiaoshuang,Shi Zhengjin.An improved Fuzzy-PID technology of vehicle attitude control system design[J].Application of Electronic Technique,2016,42(10):21-23,28.