中继无人机地面端天线自动跟踪平台设计与实现
2016-12-02袁征,杨勇,杨颖
袁 征,杨 勇,杨 颖
(武警警官学院 信息工程系,四川 成都 610213)
中继无人机地面端天线自动跟踪平台设计与实现
袁征,杨勇,杨颖
(武警警官学院 信息工程系,四川 成都 610213)
为实现地面定向天线对中继无人机的动态跟踪,保证天线主波束时刻对准无人机,确保中继通信信号强度处于优值,设计了基于RSSI盲估计跟踪的无人机地面端天线自动跟踪平台。通过Telnet连接提取天线RSSI信号并采用卡尔曼滤波算法对其进行优化处理;利用矩形扫描方式提高初始捕获速度;利用步进式“十字”跟踪方案完成天线动态跟踪。对天线自动跟踪平台的软硬件进行了设计,并对平台实物进行了测试。测试结果表明:跟踪平台具有较好的跟踪速度与跟踪精度,能满足无人机对定向天线自跟踪的需要。
无人机;天线跟踪;RSSI
0 引言
无论是打赢信息化战争还是遂行非战争军事行动,都对部队通信保障能力提出了很高的要求。目前,指挥信息系统对“宽带通、动中通、扰中通、山地通”的要求越来越迫切。实践证明,微小型无人机(Micro-unmanned Aerial Vehicle,MUAV)中继通信系统是有效解决上述问题的手段之一[1]。微小型无人机搭载通信设备升空飞行作为通信中继节点,与地面通信节点建立起战术范围内的宽带网络,可实现各节点间的数据、语音、图像高速传输[2]。受微小型无人机载荷的限制,机载通信设备必须要满足小型化、轻型化、低功耗的要求,同时,为了兼顾中继通信覆盖范围的需求,机载天线只能选用增益小、覆盖范围广的全向天线,在无法进一步加大发射机功率的条件下,其 EIRP(Effective Isotropic Radiated Power)值受到制约[3],只能依靠地面接收系统提高天线增益来弥补。地面端使用带自动跟踪能力的定向天线,使定向天线的主波束以一定的精度对准机载天线,发挥定向天线高增益的优势,实现通信链路的可靠链接[4-5],可以进一步扩展战术网络的覆盖范围,提高通信带宽和质量,降低无人机机载设备的技术要求。
为了保证无人机与地面端之间通信链路的可靠性,文献[6]开发了一个低成本的无人机天线跟踪平台,平台由惯性测量单元、全球定位系统和伺服电机组成。文献[7]设计了一种采用单脉冲跟踪技术的阵列天线跟踪系统。澳大利亚莫纳什大学的Jenvey等人为了最大限度地提高小型无人机与地面端视频链接的链路质量,设计了一种采用单脉冲跟踪体制的地面端天线跟踪平台,如图1所示,当无人机与地面站之间的距离在 700 m范围内时,该平台可以对无人机实施稳定可靠的跟踪,提高视频传输质量[8]。Obuda大学 Daniel Stojcsics等人为提高无人机飞行控制范围,设计了一种采用程序跟踪技术的无人机地面站天线跟踪平台[9]。中国航天十一院黄伟设计了一种基于GPS引导跟踪算法的无人机测控通信定向天线跟踪系统[10]。

图1 莫纳什大学采用单脉冲跟踪的天线跟踪平台
在已有的研究成果中,基于GPS定位技术的程序跟踪技术成熟可靠,但是,在微小型无人机中继通信系统中,地面端的定向天线如果采用程序跟踪模式,就需要在微小型无人机上搭载GPS模块与无线传输设备,必然会增加微小型无人机的载荷和功耗,大大降低微小型无人机的续航时间,影响中继通信系统的效能。单脉冲跟踪无疑跟踪精度最高,具有无可比拟的优势,但因为其复杂的设计以及高昂的费用并不适用微小型无人机天线跟踪平台。目前,盲估计的天线跟踪技术尚处于初级阶段,已投入应用和可供参考的系统很少,本文在参考现有研究成果的基础上,设计出一种新的基于 RSSI(Received Signal Strength Indication)盲估计的MUAV天线自动跟踪平台。
1 平台工作原理及组成
1.1平台工作原理
为降低平台复杂度,选用基于RSSI盲估计的步进跟踪技术为跟踪控制方案。其具体工作原理为:地面端不依赖无人机定位信息,在视距无阻挡前提下,直接提取地面端天线RSSI作为参考,通过矩形扫描搜寻信号强度阈值完成初始捕获。采用步进跟踪算法调整天线指向,实现天线对无人机的动态跟踪。平台工作原理如图2所示。

图2 平台工作原理图
1.2平台组成
天线自动跟踪平台主要由天线、信号强度提取单元、核心控制单元、执行单元、功能性扩展单元以及电源组成。天线是发送和接收通信信号的装置,也是跟踪系统的控制对象,平台选用增益为19 dBi的栅格天线。信号强度提取单元完成天线RSSI的提取。核心控制单元对提取到的天线RSSI处理,并向执行单元发出控制指令。执行单元接收主控单元指令后驱动天线到达指定位置。平台组成示意图如图3所示。

图3 平台组成示意图
2 平台硬件设计
2.1核心控制与信号提取单元
平台采用软硬件资源开源、价格低廉、扩展性强的Arduino UNO开发板作为天线自动跟踪平台的核心控制单元,如图4所示。
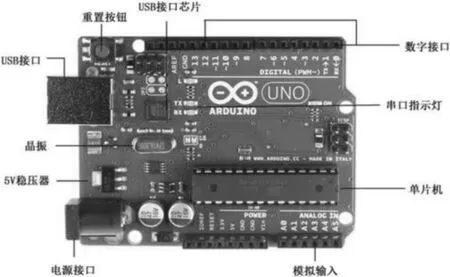
图4 Arduino UNO开发板结构图
信号强度提取单元采用 Arduino Ethernet扩展板外加双 LAN(Low Noise Amplifier)口 POE(Power Over Etherne)供电器。Arduino Ethernet以太网控制模块是一块内置W5100芯片的扩展板,如图5所示。

图5 Arduino Ethernet扩展板结构图
它内部集成了全硬件的、且经过多年市场验证的TCP/IP(Transmission Control Protocol/Internet Protocol)协议栈、以太网介质传输层和物理层。
将 Arduino Ethernet扩展板通过长针脚排母以总线形式连接Arduino UNO控制板,再将 Arduino Ethernet扩展板的RJ-45接口与POE供电器的一个 LAN口相连,POE供电器的另一个LAN口直接与通信接收机相连接,连接示意图如图6所示。

图6 信号提取单元连接示意图
2.2执行单元
执行单元包括转台和转台内的伺服部件。转台是支撑天线的装置,而转台内的伺服部件由控制器控制,使转台按照跟踪算法转动,带动天线跟踪中继无人机。转台根据其旋转的特点可分为只能左右旋转的水平转台和既能左右旋转又能上下旋转的全方位转台[11]。天线对中继无人机的实时跟踪需要天线在方位面和俯仰面调整指向。因此,平台采用全方位转台结构。转台结构示意图如图7所示。
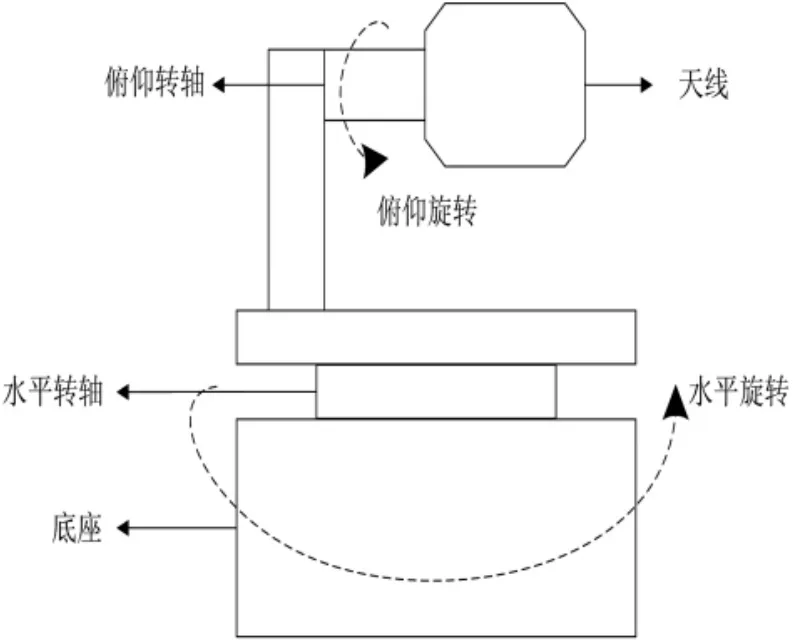
图7 全方位转台结构示意图
转台内伺服部件是整个执行单元的重要组成部分,也是设计的关键,主要包括伺服电机和位置检测元件的选择。为减小体积和节约成本,平台选用舵机作为转台的伺服电机。技术参数如表1所示。

表1 舵机技术参数表
3 软件设计
3.1RSSI提取
令控制器与通信接收机建立Telnet连接,提取通信接收机的信号接收强度。进行 Telnet连接,首先需要对Arduino Ethernet初始化设置,初始化设置工作主要包括释放缓冲区数据,设置缓冲区起始与结束地址,设置本地IP地址与MAC地址等。其次,建立一个Telnet会话,必须通过用户名和口令进行认证,本设计中用户名与口令都默认 admin。通过调用 EthernetClient::connect(IPAddress ip,uint16_t port)函数与通信接收机建立Telnet连接,其中参数ip为通信接收机 IP地址,port为端口号,默认为 23,建立 Telnet连接流程如图8所示。

图8 Telnet连接建立流程图
Telnet连接成功建立后,控制器向通信接收机发送状态请求指令,指令以字符串的形式发送,通信接收机接收到状态请求指令后便会向W5100模块发送自身的全部状态信息,状态信息也是以字符串的形式,保存在W5100模块接收缓冲器中。天线自动跟踪平台在跟踪过程中,只需要用到状态信息中的 RSSI信息,对其余信息保存会占用整个系统的存储资源,所以,需要对字符串进行提取,获得有用信息。
3.2RSSI滤波处理
无线信号在空间的传播比较复杂,往往存在多径、散射、电磁干扰等不稳定因素,可能使接收到的RSSI产生严重的时变特性和较大的波动性,往往造成跟踪平台误跟踪或者出现严重抖动现象。因此,需要采用滤波算法对采集到的RSSI数据进行滤波优化处理,去除 RSSI数据中的突变数据和噪声波动,利用优化后的 RSSI值,再进行跟踪计算。如图9所示,为卡尔曼滤波器对RSSI滤波模型图。
首先,根据RSSI测量环境建立一个计量系统,建立的系统模型不要求非常精确,可以利用此系统模型预估下一状态即可。假设系统目前的状态是k,可以根据系统的前一状态k-1来预估出目前状态k。假设当前时刻跟前一时刻提取到的RSSI是相同的,并且因为系统没有控制量,所以得到当前状态的预估结果为:

图9 卡尔曼滤波模型

式(1)中,RSSI(K-1|K-1)是前一状态 k-1最优结果,(K|K-1)是目前状态k的预估结果。


根据式(3),就得到k状态下的 RSSI最优估算值 。为了递归下去,再对k状态下RSSI(K|K)的协方差进行更新,因为RSSI的计量是单模型单测量系统,得到k状态的协方差:

当系统递归到 k+1状态时,P(K|K)就是式(2)的P(K-1|K-1),这样,算法就可以自回归的运算下去。
3.3初始捕获
初始捕获是为了使无人机进入地面定向天线的主波束范围之内,获取一定的中继通信信号。本平台对无人机的初始捕获采用矩形扫描法,通过采用阈值判定法来判定捕获是否成功,扫描示意图如图10所示。
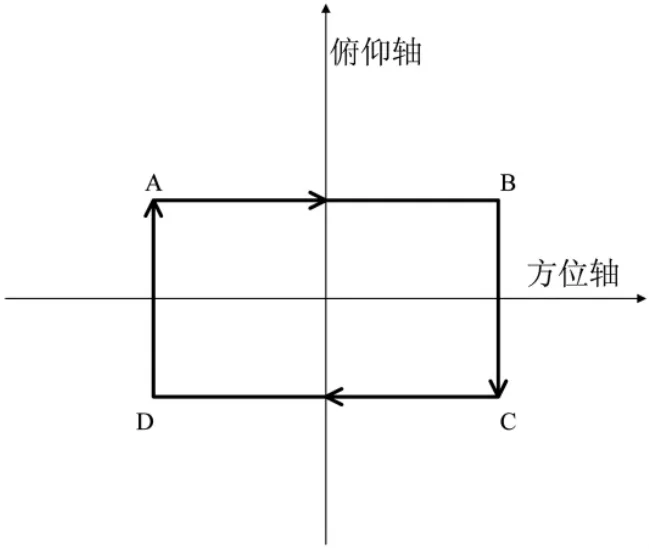
图10 矩形扫描示意图
3.4动态跟踪
动态跟踪过程采用步进跟踪体制,该过程可以形象地形容为“十字”跟踪。它是一个采样、比较和步进的循环过程,使天线在初始捕获的基础上以更小的步长动态搜索RSSI极值,流程图如图11所示。具体实现过程为:方位、俯仰两轴按右-左-上-下的步进次序进行转动,在转动的过程中,采集当前RSSI,与上一时刻RSSI进行比较。若当前RSSI>前一次 RSSI,就向前一次步进的方向继续步进一步,相反,若当前 RSSI<前一次RSSI,则向前一次步进方向的反方向步进一步。每经过一次右-左-上-下的步进次序都可以确定一次 RSSI极大值,如此循环往复,动态寻找RSSI极值,直至经过多次“十字”跟踪过程,RSSI值始终维持在跟踪阈值以上。

图11 动态跟踪流程图
4 平台测试
测试地点:某公园开阔地
测试环境:无障碍物遮挡,通信信号满足视距传播
测试步骤:
(1)为简化测试模型,对两部通信设备进行组网设置,省去地面通信的发射端。由微小型无人机搭载一部通信设备升空飞行,作为中继通信的地面发射端,同时也是中继端,另一部通信接收机与天线跟踪平台相连,作为地面接收端。测试时,天线跟踪平台与一PC机相连,可通过Arduino IDE的串口监视器对RSSI变化进行观察。
(2)微小型无人机由飞行控制系统控制,在地面端一侧,距离地面端500 m,升空高度100 m处的空域以半径R=50 m做匀速圆周运动。
(3)设置RSSI采样频率为1次/s,先测试无天线跟踪平台时 RSSI变化,通过肉眼观察,手动对天线的指向进行调整,观察RSSI的变化并记录。
(4)测试天线跟踪平台。检查天线跟踪平台的连线正确无误后,开启平台,观察 RSSI的变化并记录。平台测试图如图12所示。

图12 平台测试图
如图13所示,为 PC机 Arduino IDE串口监视器中RSSI显示。

图13 RSSI显示图
如图14所示,为相同条件下手动跟踪、自动跟踪过程中地面端天线RSSI的45组数据变化情况。

图14 跟踪测试结果对比图
通过测试结果可以看出,手动跟踪无法实现天线波束对中继无人机的对准,导致地面端天线RSSI无法达到理想数值,而且RSSI值会发生大幅度变化,无法满足微小型无人机中继通信信号强度要求。自动跟踪在经过多次 RSSI采样后,可将 RSSI值维持在一个理想数值范围状态,表明本文设计的天线跟踪平台起到天线跟踪的效果。
5 结论
本文以某型微小型无人机中继通信系统为背景,提出基于RSSI盲估计的跟踪控制方案,设计了一款地面端天线自动跟踪平台。进行了相应的软硬件设计,并进行了测试,结果表明所设计的天线自动跟踪平台具有较好的跟踪效果,提高了中继通信的通信质量。
[1]贾鹏万,冯寿鹏,张爱辉.基于VR-Platform的无人机中继通信虚拟教学系统[J].兵工自动化,2012,31(6):93-96.
[2]何一,姜飞,张亚妮.基于多旋翼无人机和4G的指控系统中继通信研究[C].北京:第三届中国指挥控制大会,2015.
[3]LIU Z Q,ZHANG Y S.A novel broad beamwidth conformal antenna on unmanned aerial vehicle[J].Antennas and Wireless Propagation Letters,IEEE,2012,11:196-199.
[4]MIN B C,MATSON E T,JUNG J W.Active antenna tracking system with directional antennas for enhancing wireless communication capabilities of a networked robotic system[J].Journal of Field Robotics,2015.
[5]GU Y,ZHOU M,FU S.Airborne WiFi networks through directional antennae:An experimental study[C].Wireless Communications and Networking Conference(WCNC),2015 IEEE.IEEE,2015:1314-1319.
[6]GANTI S R,KIM Y.Design of low-cost on-board autotracking antenna for small UAS[C].Information Technology-New Generations(ITNG),2015 12th International Conference on.IEEE,2015:273-279.
[7]GEZER B L.Multi-beam digital antenna for radar,communications,and UAV tracking based on off-the-shelf wireless technologies[D].Monterey California.Naval Postgraduate School,2006.
[8]JENVEY S.A portable monopulse tracking antenna for UAV communications[C].22nd International Unmanned Air Vehicle Systems Conference.2007:1-8.
[9]STOJCSICS D,MOLNÁR A.AirGuardian-UAV hardware and software system for small size UAVs[J].Int J Adv Robotic Sy,2012,9(174).
[10]黄伟,周乃恩,王诚,等.一种无人机通信天线伺服系统的构建[J].电子技术应用,2009,35(6):98-101.
[11]杨润,闫开印,马术文.小型无人机机载两轴云台设计与实现[J].自动化与仪器仪表,2014(7):165-168.
Design and implementation of the automatic tracking platform for the ground terminal antenna of the relay UAV
Yuan Zheng,Yang Yong,Yang Ying
(Department of Information Engineering,Armed Police College of PAP,Chengdu 610213,China)
In order to realize the dynamic tracking of the ground directional antenna to the relay UAV,ensure the antenna main beam moment on the UAV so that the signal strength of the relay communication is at the optimal value,a blind estimation tracking antenna automatic tracking system based on RSSI is designed and developed.The signal is extracted by Telnet connection, and the Kalman filtering algorithm is used to optimize the antenna RSSI signal;improving the initial capture speed by using rectangular scanning method;the antenna dynamic tracking is completed by using the step"cross"tracking scheme.The hardware and software of the automatic tracking platform are designed and tested.The test results show that the tracking platform has better tracking speed and tracking precision that can satisfy the requirements of automatic tracking to the UAV.
UAV;antenna tracking;RSSI
TN911
A
10.16157/j.issn.0258-7998.2016.10.003
(2016-06-18)
袁征(1991-),通信作者,男,硕士,助教,主要研究方向:无人机、通信。E-mail:297181357@qq.com。
杨勇(1975-),男,博士,教授,主要研究方向:通信、信号处理。
杨颖(1986-),女,硕士,讲师,主要研究方向:信号处理、算法优化。
中文引用格式:袁征,杨勇,杨颖.中继无人机地面端天线自动跟踪平台设计与实现[J].电子技术应用,2016,42(10):16-20.
英文引用格式:Yuan Zheng,Yang Yong,Yang Ying.Design and implementation of the automatic tracking platform for the ground terminal antenna of the relay UAV[J].Application of Electronic Technique,2016,42(10):16-20.