基于FPGA的SVPWM过调制算法的设计
2016-12-02王水鱼肖宝峰
王水鱼,肖宝峰
(西安理工大学 自动化与信息工程学院,陕西 西安 710048)
基于FPGA的SVPWM过调制算法的设计
王水鱼,肖宝峰
(西安理工大学 自动化与信息工程学院,陕西 西安 710048)
对SVPWM过调制控制原理进行了分析,把调制区域分为两个部分,并用相应的控制策略来实现。为便于工程实现,对双模式过调制方法进行了简化,即在过调制Ⅰ区只修改电压矢量的幅值,不改变相位;而在过调制Ⅱ区使用相位跳变的方式来修改电压矢量的相位。这种方法可以控制逆变器从线性调制模式平滑过渡到六拍波模式。最后,利用Verilog HDL编写代码、设计程序,并用Modelsim软件进行仿真验证。从仿真结果可以看出,这种过调制方法是可行的。
SVPWM;过调制控制;逆变器;电压利用率
0 引言
将SVPWM控制方法应用在逆变器控制系统中,相对于常规六拍阶梯波形,可以得到更好的输出电压波形,同时直流电压利用率能够提高15%左右,并且可以降低30%左右的开关损耗,动态性能更好[1]。
但是在有些场合需要输出更高的交流电压,当出现过调制时,输出的基波电压与调制度不再是线性关系,输出电压部分受控。因此,对过调制方法的研究非常重要。在参考文献[2-3]中,分别将过调制区域分为两部分,并对其算法进行了相应的分析。本文研究了一种易于工程实现的过调制算法,并用Modelsim进行了仿真验证。仿真结果表明该算法是可行的。
1 SVPWM原理
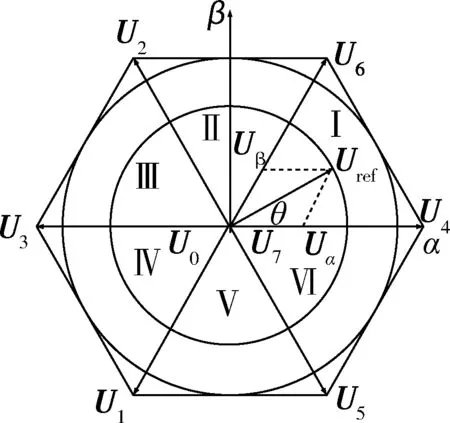
图1 空间电压矢量
空间电压矢量如图1所示。逆变器开关有8个状态,对应8个基本电压矢量,包括6个非零矢量分别为U1、U2、U3、U4、U5、U6和两个零矢量U0、U7。电压空间被这8个电压矢量分为6个扇区。任何一个空间电压矢量都可以由每个扇区内相邻的两个非零矢量和零矢量合成[4]。
根据伏秒平衡原理,可以计算出每个扇区内基本电压矢量的作用时间,然后合成任意电压矢量。为了减少谐波,通常采用七段式分配方法,即在一个周期内零矢量均匀地分布在开头和中间,保证每次只有一个开关动作。
2 过调制算法的原理
定义调制度为:
(1)
式(1)中分母为逆变器在六拍波状态下输出的相电压幅值,分子为参考电压幅值。根据调制度的不同,将调制区域划分为线性调制区、过调制Ⅰ区、过调制Ⅱ区。
2.1 线性调制区
如图1所示,当参考电压矢量在正六边形内部时,可以用8个基本电压矢量来合成。此时,电压矢量的轨迹为圆形。利用伏秒平衡原则计算出扇区内相邻两个非零矢量的作用时间和零矢量的作用时间,然后合成电压矢量。
当m=0.906 9时,电压矢量的轨迹为正六边形的内切圆,输出基波电压达到线性调制区的最大值。
2.2 过调制Ⅰ区
如图2所示,在过调制Ⅰ区,只改变电压矢量的幅值,而不更改电压矢量的相位。即将超出正六边形边界的电压矢量限制在六边形边界上,而输出电压矢量的相位与参考电压矢量相同,以减少谐波。其中,外圆为期望的参考电压矢量,内圆为调制后输出电压矢量的基波分量。修改后的输出电压矢量为粗实线所示。

图2 过调制Ⅰ区矢量图
可以得到参考角度α1的计算公式为:
(2)

以第一象限为例,修改后输出电压幅值和输出电压相位的关系为:
(3)
2.3 过调制Ⅱ区
当调制度增大到0.951 7时,输出电压矢量的轨迹为正六边形的边界,调制度再增大的话,参考电压矢量将超出正六边形的边界,此时,只能通过延长基本电压矢量的作用时间来进行补偿。

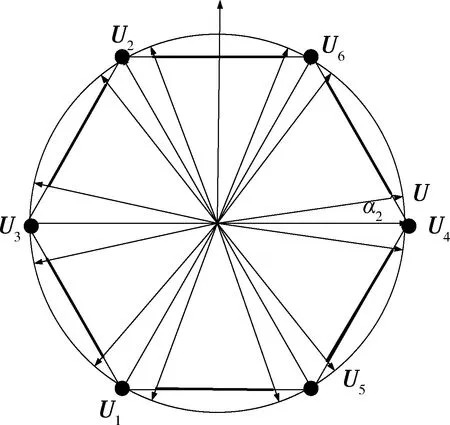
图3 过调制Ⅱ区矢量图
电压矢量是交替领先的,相位在不停地变化,控制起来比较复杂。可以通过相位跳变的方式来改变电压矢量的相位,这样输出电压谐波会稍微增大,但是可以得到算法上的简化,利于工程实现。
在α2内实际输出电压矢量为基本电压矢量,相位为0。当参考电压矢量相位达到α2时,实际输出电压矢量和参考电压矢量同步旋转,相位从α2开始,与参考电压矢量相位相同。修改后输出电压矢量的轨迹为图3中粗实线所示。以第一象限为例,实际输出电压矢量幅值和参考电压矢量相位的关系为:
(4)
α2与调制度m之间的关系不是线性的,在工程实现中需要离线计算或者将其线性化。分段线性化之后的计算公式为:
(5)
3 算法的实现和验证
算法的主流程图如图4所示,根据参考电压矢量计算出调制度,然后按照调制度的大小将调制区域分为3个部分,即线性调制区、过调制Ⅰ区、过调制Ⅱ区。分别采用相应的调制方法进行处理。

图4 主流程图
在过调制Ⅰ区,由式(2)和式(3)计算出参考角度α1和输出电压修改后的幅值,计算出矢量的作用时间,然后按照过调制Ⅰ区的方法修改矢量的作用时间,其流程如图5所示。
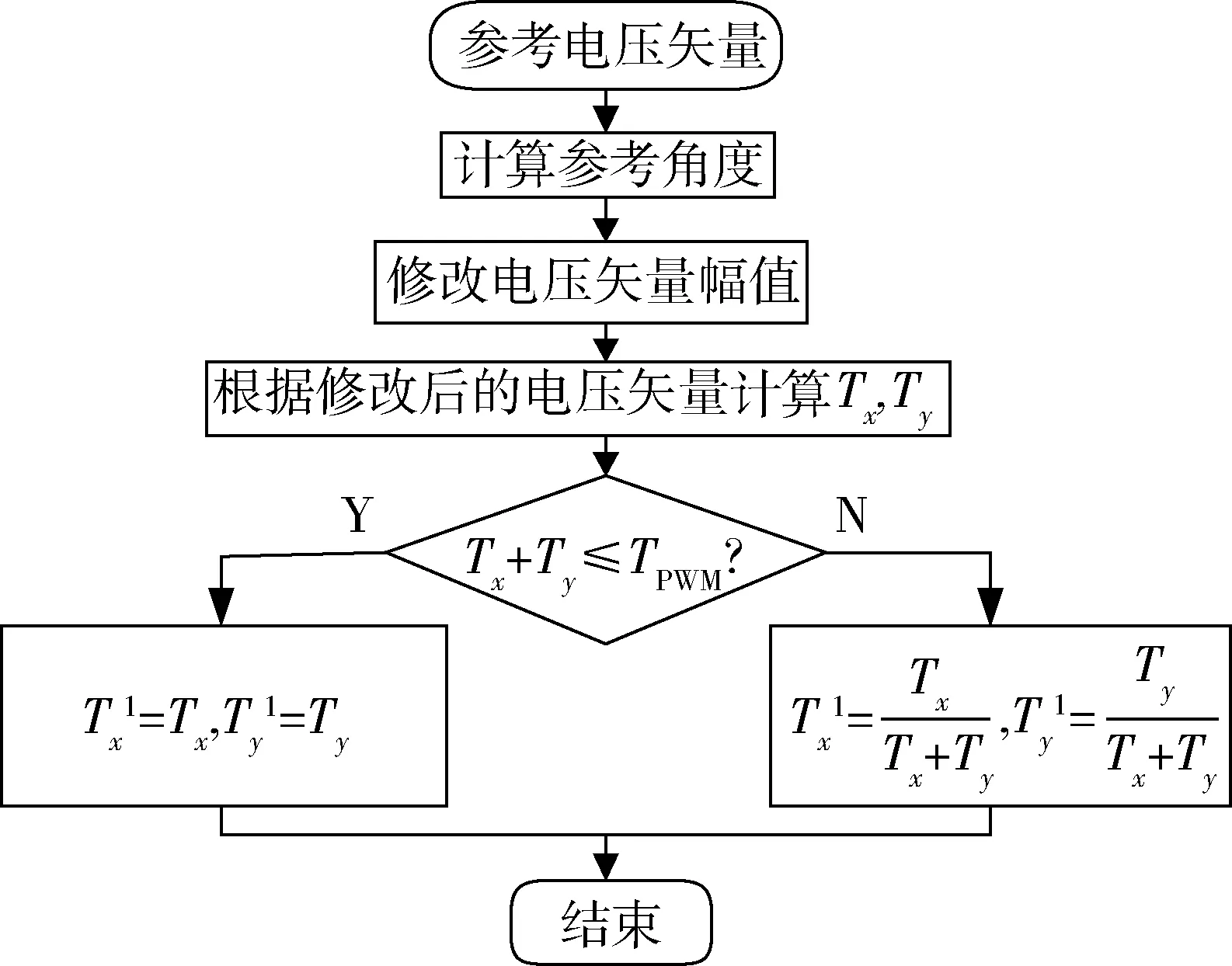
图5 过调制1区流程图
在过调制Ⅱ区,由式(4)和式(5)计算出α2和输出电压修改后的幅值,计算矢量作用时间,然后按照过调制Ⅱ区的方法修改矢量的作用时间,其流程如图6所示。

图6 过调制Ⅱ区流程图
本文采用Modelsim软件进行编程和仿真验证,图7为不同调制度下的SVPWM调制波波形,每个调制度取两个周期,调制度分别为0.904 0、0.934 3、0.959 6、1。

图7 SVPWM相电压调制波波形
从图7中可以看到,调制波的波峰逐渐消失,最后为方波状态。与此同时逆变器逐渐从线性调制区过渡到过调制Ⅰ区、过调制Ⅱ区,最后工作在六拍波状态。
4 结论
本文研究了一种SVPWM过调制方法,详细推导了该算法的基本原理和实现步骤,并进行了简化,使其易于工程实现。针对上述过调制方法,调用Modelsim进行仿真验证。结果表明,该过调制算法可以实现从线性调制状态到六拍波运行状态的过渡。
[1] 瞿文龙,黄斐梨.逆变器供电感应电机新型空间矢量PWM控制方法[J].清华大学学报:自然科学版,1997,37(1):69-73.
[2] 张艳芳,林飞,马志文,等.两种SVPWM过调制方法的比较研究[J].北京交通大学学报,2005,4(2):39-43.
[3] 吕敬,张建文,王晗,等.SVPWM过调制算法的理论分析与实验应用[J].电气传动,2011,41(8):7-11.
[4] 全恒立,张钢,陈杰,等.一种SVPWM过调制算法的数字化实现[J].电气传动,2010,40(5):44-48.
[5] 宛世源.SVPWM过调制算法研究与实现[D]. 武汉:华中科技大学, 2014.
Implementation of SVPWM over modulation algorithm based on FPGA
Wang Shuiyu,Xiao Baofeng
(College of Automation and Information Engineering, Xi’an University of Technology, Xi’an 710048, China)
The principle of SVPWM over modulation control is analyzed, and the modulation region is divided into two parts, and with the corresponding control strategy to achieve. In order to facilitate project implementation, the dual-mode over modulation method is simplified, namely in over modulation region I only modify the amplitude of the voltage vector, does not change the phase, and in over modulation zone II using the phase jump way to modify the phase of the voltage vector. This method can control the inverter from a linear modulation mode to a smooth transition to the six beat wave mode. Finally, using Verilog HDL to write code, design program, and using Modelsim software to simulate and verify. From the simulation results we can see that this method is feasible.
SVPWM;over modulation control;inverter;voltage availability
TM464
A
10.19358/j.issn.1674- 7720.2016.21.009
王水鱼,肖宝峰. 基于FPGA的SVPWM过调制算法的设计[J].微型机与应用,2016,35(21):30-32.
2016-07-01)
王水鱼(1958-),男,学士,副教授,主要研究方向:信号系统与电子测量。
肖宝峰(1986-),通信作者,男,硕士研究生,主要研究方向:信号系统与电子测量。E-mail:bf060217@sina.com。
