矿区机载激光点云数学形态学滤波及DEM构建算法
2016-12-02蔡尚书
蔡尚书
(山东科技大学测绘科学与工程学院)
矿区机载激光点云数学形态学滤波及DEM构建算法
蔡尚书
(山东科技大学测绘科学与工程学院)
机载激光测量系统能够快速、精确地获取大面积区域的三维空间信息,是矿山地表沉陷调查的重要手段。以某矿区为例,采用国际摄影测量与遥感协会提供的参考数据,利用渐进式多尺度数学形态学滤波算法,从点云数据中提取出分布于地面上的点云,并构建了数字高程模型(Digital elevation model,DEM)。试验表明:该算法可有效提取复杂区域的地面点云数据,并可构建满足精度要求的DEM。
机载激光点云 数学形态学滤波 DEM
在矿区使用机载激光雷达点云构建的DEM能够提取出矿山地表沉陷的几何特征信息和空间信息,可为矿区地质环境问题防治提供可靠依据[1]。如何从原始点云数据中快速、准确地提取出地面点,进而构建高精度的DEM一直是点云数据处理的热点和难点。目前,学者们分别采用了数学形态学法[2]、不规则三角网法[3]、最小二乘线性内插法[4]以及坡度变化法[5]对点云滤波提取地面点的方法进行了大量研究,取得了一定的成效。本研究在分析上述成果的基础上,采用渐进式多尺度数学形态学滤波算法对某矿区地面点云数据进行滤波,以提取出点云信息并构建DEM。
1 渐进式多尺度数学形态学滤波
1.1 滤波原理
数学形态学定义了腐蚀、膨胀2种基本运算方式。基于灰度图像的腐蚀和膨胀运算是在结构元素定义的邻域内选择图像像素值与结构元素作用后的最小或最大像素值[6]。先腐蚀后膨胀形成的开运算具有滤除小型地物的同时保护较大地物边缘的特性,因此被广泛应用于点云滤波中。若开运算结构元素尺寸选择过小,则仅能滤除小型地物,反之则易导致地形细节信息被过度平滑。通过渐进增加结构元素尺寸进行迭代滤波,可在滤除各种尺寸地物的同时有效保护地形细节信息。开运算倾向生成一个低于地面点的表面,易平滑起伏较大地形的顶部信息[7]。对此,定义了一种与地形和建筑物尺寸相关的高差阈值:
式中,h0为初始高差阈值;c为格网尺寸;hmax为最大高差阈值;ωi为第i次(i=1,2,3,…,M)结构元素尺寸。
若开运算前后格网的高程之差小于Δhi,则判断该格网属于地面点类格网。
1.2 基本步骤
(1)生成格网化数字表面模型(Digital surface model,DSM)。滤波前,需对离散的点云数据进行组织,生成格网化DSM,步骤为:①空白格网插值填充,由于点云分布的不均匀性、大型地物遮挡等缘故产生的数据空洞造成部分格网中含有多个或不存在激光脚点,若格网中含有多个激光脚点则使用高程最小值作为格网高程,若不存激光脚点,则使用最近邻法进行插值处理;②粗差点剔除,由于激光的多路径效应、设备系统误差及空中悬浮物遮挡等因素的影响,导致点云数据中含有较邻近点明显高或低的激光脚点,该类点的存在将严重影响滤波后DEM的精度,可用邻域平均法剔除该类激光脚点。
(2)滤波处理。获得格网化DSM后进行滤波处理的步骤为:①参数设置,滤波参数主要有初始高差阈值h0、坡度系数s、最大高差阈值hmax;②数学形态学开运算,对格网化DSM进行开运算,根据高差阈值h0判断格网属性,并标记;③算法迭代,在上一次滤波结果的基础上再次进行数学形态学开运算,并进行格网属性判别,直至结构元素尺寸大于最大建筑物尺寸为止。
2 试验结果
试验数据来源于国际摄影测量与遥感协会(ISPRS)提供的参考数据。某矿区地形变化较大,地物类型包括大型建筑物、植被等,点云数量为65 811点,平均点间距1.5 m,原始点云如图1所示。

图1 原始点云数据
初始高差阈值h0近似等于激光点云的高程误差,故设置为20 cm;根据测试区域地形情况,设置坡度s为0.2;最大高差阈值hmax为6 cm。经迭代开运算滤波,所得地面点云及DEM分别如图2、图3所示。由图2、图3可知:本研究算法可有效滤除各种尺寸的地物信息,并有效保留了地形的细节信息。
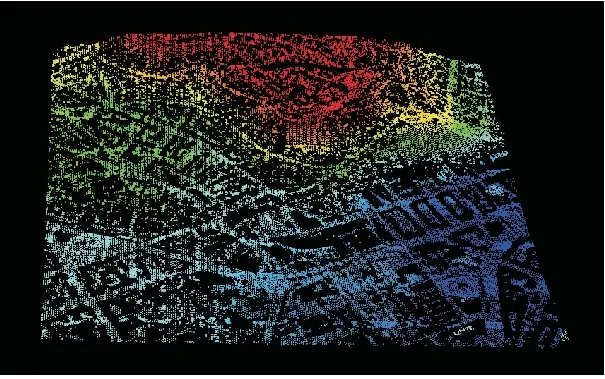
图2 点云滤波结果
3 结 语
机载激光扫描系统能够快速获取地面和地物的三维空间信息,在矿区变形监测中得到广泛应用。对机载激光点云数据进行滤波,即从原始点云中提取分布于地面上的点信息,为矿山地表沉陷几何特征信息和空间信息的获取提供了数据源。以某矿区为例,采用渐进式多尺度数学形态学滤波算法进行了地面点信息提取,并构建了精确的DEM,对于矿区变形监测有一定参考价值。
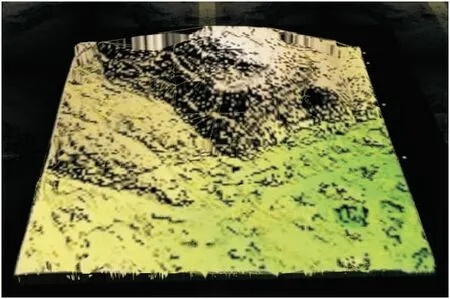
图3 矿区DEM
[1] 吴 芳,张宗贵,郭兆成,等.基于机载LiDAR点云滤波的矿区DEM构建方法[J].国土资源遥感,2015,27(1):62-66.
[2] 沈 晶,刘纪平,林祥国.用形态学重建方法进行机载LiDAR数据滤波[J].武汉大学学报:信息科学版,2011,36(2):167-170.
[3] Axelsson P.DEM generation from laser scanner data using adaptive TIN models[J].International Archives of Photogrammetry and Remote Sensing,2000,33(1):85-92.
[4] Kraus K, Pfeifer N.Determination of terrain models in wooded areas with airborne laser scanner data[J].ISPRS Journal of Photogrammetry and Remote Sensing,1998,53(4):193-203.
[5] Vosselman G.Slope based filtering of laser altimetry data[J].International Archives of Photogrammetry and Remote Sensing, 2000,33(3):935-942.
[6] 罗伊萍,姜 挺,龚志辉,等.基于自适应和多尺度数学形态学的点云数据滤波方法[J].测绘科学技术学报,2009,26(6): 6426-6429.
[7] 李 峰,崔希民,袁德宝,等.改进坡度的LiDAR点云形态学滤波算法[J].大地测量与地球动力学,2012,32(5):128-132.
2016-04-30)
蔡尚书(1992—),男,硕士研究生,266590 山东省青岛市黄岛区前湾港路579号。
