新算法
2016-12-01
新算法让智能汽车更精准检测行人
时至今日,汽车防碰撞系统和实验性质的无人驾驶汽车依靠的是雷达等传感器来检测路上的行人。加州大学圣地亚哥分校的 Nuno Vasconcelos 团队研发了一套基于视觉信号进行实时探测的行人检测系统,这套视频系统能使智能汽车更精准检测行人,成本也更加便宜。
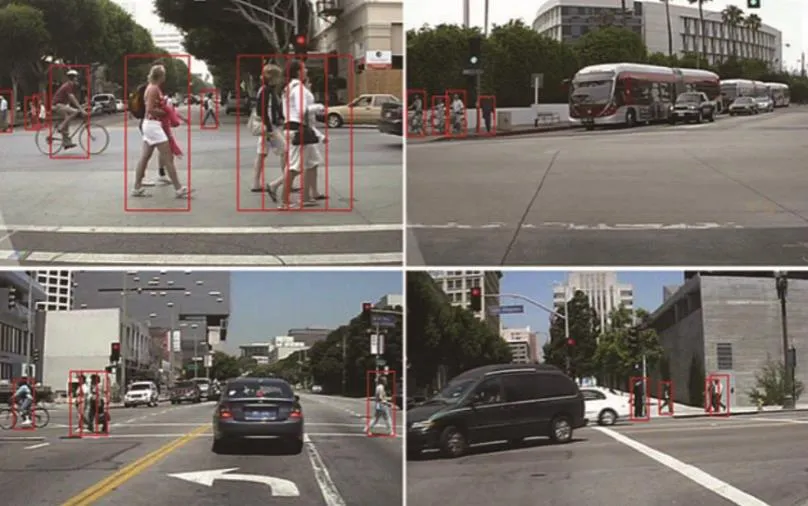
基于视觉的汽车安全系统在应用中仍然难以实现,一方面,通过计算机视觉算法能快速检测路上的行人,但是在区分行人和类似物体等复杂情况下,依然不够成熟。另一方面,机器学习算法(又称深度神经网络)仿照人脑行为,研究人员能够训练出比之前方法更富辨别力,处理复杂的模式识别,但是在实时的行人检测上处理的效率太慢。
Nuno Vasconcelos 的新算法,可以通过 2~4 frame/s的速度检测行人的变化,有效避免行人突然停止移动而出现的紧急刹车或造成意外事故。
这套系统的关键在于可以识别更加复杂的路况。与其他类似的系统相比,该算法的系统出错率只有前者的一半,而且计算能力更加突出,能在远处对行人的移动进行预判。研究小组计划未来让系统变得更加实用:不仅应用于车辆,还能应用于机器人、安全摄像头等设备。
新建正则化参数选取模型有助低剂量CT的研制
由于成像质量好,空间分辨率高, CT技术已成为一种广泛使用的医疗检查和辅助诊断方法。然而过高的X射线辐射剂量可导致某些基因疾病,对身体健康造成极大隐患。因此CT扫描设备的设计需要考虑降低辐射剂量,减少探测器采集的投影数据是一个降低剂量的有效方法。但这种方法形成的不完全投影数据在利用传统解析算法(比如滤波反投影算法)进行重建时,由于采样率无法满足香浓柰奎斯特采样定理要求,重建图像会有严重的混叠伪影,极大地影响了成像质量。
源于2006年提出的压缩感知(compressed sensing)理论,字典学习方法利用医学图像中的稀疏先验信息,能够有效地求解这一类不完全投影数据的重建问题,在滤除重建图像中噪声的同时,能够高质量还原图像中的细节信息。然而,重建算法中的关键参数——正则化参数的确定并没有系统的选取准则,利用经验选取的方法需要通过大量重复的测试选取合理的参数,耗时长且效率低下。
苏州生物医学工程技术研究所的章程等人提出了一种利用CT投影数据自动确定正则化参数的函数模型。利用投影数据在正则化参数无穷大的情形下得到的重建图像,计算出能够反映投影数据噪声水平和待重建图像结构特征的参数,将其与经验选取的正则化参数利用函数拟合的方法得到正则化参数选取模型。
实验结果表明,正则化参数选取模型具有比较高的准确性,与模型选取的参数相比,较小的参数会使重建图像产生条形伪影和较高的噪声水平,较大的参数会使重建图像信噪比和空间分辨率降低。与其他对比算法的比较结果表明,文中提出的算法能够求解不完全投影数据的CT图像重建问题,重建图像的质量也有一定的提高。新型的高质量重建算法的研究对未来低剂量CT的研制有着重要的意义。