一类噪声相关多传感器系统的新型序贯式融合滤波
2016-12-01宁涛,文成林,杨艳萍,冯肖亮*
宁 涛, 文 成 林, 杨 艳 萍, 冯 肖 亮*
( 1.河南工业大学 电气工程学院, 河南 郑州 450001;2.黄河水利职业技术学院, 河南 开封 475004 )
一类噪声相关多传感器系统的新型序贯式融合滤波
宁 涛1, 文 成 林1, 杨 艳 萍2, 冯 肖 亮*1
( 1.河南工业大学 电气工程学院, 河南 郑州 450001;2.黄河水利职业技术学院, 河南 开封 475004 )
对于过程噪声与观测噪声一步互相关、各观测噪声一步自相关的多传感器融合滤波问题,提出了一种新的低维序贯式融合滤波算法.基于低阶迭代正交变换的思想提出了解相关的方法,将观测方程经过等价改写去除系统噪声的相关性,然后依据序贯滤波的思想,依次处理到达融合中心的观测信息,进而得到一类实时序贯式融合滤波算法.整个推导过程在线性最小均方误差意义下严格进行,能够实现系统状态的最优融合估计.最后的仿真验证了新算法在处理上述噪声相关问题上的最优性.
序贯式融合滤波;噪声相关;多传感器系统
0 引 言
近年来,多传感器系统迅速发展,已经起到越来越重要的作用,现已应用到军事、航空以及城市交通等诸多领域,具有非常好的应用前景.经过国内外众多研究者的努力,对于多传感器数据融合算法,现已取得较多的研究成果.
由于传感器工作环境等因素的影响,在实际多传感器系统中,经常会出现多种形式的干扰源,使得系统与传感器在工作过程中受到相关噪声的共同影响.这在系统状态描述上就表现为过程噪声与观测噪声的相关性.针对含有噪声相关性的融合滤波方法研究,已得到国内外学者的关注,成为信息融合领域的研究热点问题之一.
文献[1]考虑了过程噪声与观测噪声多步相关的单传感器观测系统滤波问题,并证明了过程噪声与观测噪声一步相关时,该方法的最优性.文献[2]假设过程噪声与观测噪声不相关,观测噪声相邻3步相关时的单传感器最优滤波问题,并进一步将其推广到相邻多步观测噪声相关的一般性情况.文献[3]综合考虑了过程噪声与观测噪声分别有限步相关时的最优滤波问题,但是没有考虑过程噪声与观测噪声同时有限步相关的复杂场景.可见,这些滤波方法的研究主要是针对单传感器的滤波问题开展的.
针对多传感器协同工作的场景,文献[4]考虑了不同传感器之间可能存在的噪声相关性,利用矩阵伪逆分解的形式将最小均方误差意义下最优的集中式融合滤波算法改写成分布式迭代估计的形式.文献[5-6]进一步基于Cholesky 分解和单位下三角阵的求逆方法,对相关噪声进行改写得到噪声不相关的多传感器等价观测形式,然后基于集中式融合滤波方法给出了一类最优的融合滤波算法.文献[7]考虑了噪声相关性对分布式航迹融合滤波过程的影响.文献[8]进一步考虑了各传感器之间观测噪声的相关性对时滞系统分布式航迹融合滤波的影响,同时还考虑了观测噪声与过程噪声之间的一步相关性.文献[9-10]研究了各传感器观测噪声之间一步自相关、各观测噪声与过程噪声之间一步互相关的融合滤波问题,但是都需要基于矩阵扩维方法得到高维的增广矩阵来进行处理,对系统运算能力的需求较高,尤其是在高维观测矩阵的应用场景中.
针对上述问题,本文基于迭代正交变换,提出一种低维的解相关方法将观测方程经过两次改写之后,得到新的噪声不相关的等价观测方程;然后依据序贯滤波的思想,给出一种改进形式的低维序贯式融合滤波算法.整个算法的推导过程都是在线性最小均方误差(LMMSE)意义下进行的,因而,所得的融合滤波结构能够实现LMMSE意义下的最优估计,而且迭代正交变换的采用能避免高维矩阵运算的运用,可大大简化融合滤波过程对系统计算能力的需求.
1 系统描述
考虑一类多传感器动态系统
x(k)=F(k,k-1)x(k-1)+w(k,k-1)
(1)
式中:k(k=1,2,…)为离散时间;x(k)为系统的状态向量;F(k,k-1)为状态转移矩阵;系统的过程噪声w(k,k-1)服从高斯分布,且满足如下统计特性:
(2)
现假设N个传感器对目标运动过程进行观测,对应的观测方程为
zi(k)=Hi(k)x(k)+vi(k);i=1,2,…,N
(3)
式中:zi(k)为第i个传感器对状态x(k)的观测值; Hi(k)为第i个传感器的测量矩阵; vi(k)为对应的观测噪声,满足如下统计特性:
(4)
当i=j时,Si,j(k)=Ri(k).
由上式vi(k)的统计特性可以看出系统的观测噪声和相邻时刻的过程噪声相关,并且不同传感器的观测噪声在同一观测时刻也是相关的.在这种系统噪声环境下,按照传统序贯滤波方法对系统状态进行融合估计时,往往会因噪声相关性的干扰,估计精度较差,甚至引起态势误判等严重后果.因而,噪声相关性在系统状态的融合滤波过程中不容忽视.
2 算法介绍
上面提到的两类噪声相关性,导致传统的序贯滤波方法难以实现对状态的最优融合滤波.本章拟基于低阶迭代正交变换,研究解相关的方法去除上述两类噪声相关性,然后利用序贯滤波的思想,对系统状态进行融合估计.
2.1 解相关方法
不妨将观测噪声与过程噪声之间的互相关性称为第一类相关性;将同时刻不同传感器观测噪声之间的自相关性称为第二类相关性.
对于由式(1)和(3)组成的系统,N个传感器在k-1时刻采集到的测量值到达融合中心进行滤波后,得到k-1时刻的状态融合估计值,记为

x^
(k-1|k-1),对应的估计误差协方差记为P(k|k-1),则对k时刻系统状态的一步预测为

x^(kk-1)=F(k,k-1)x^(k-1k-1)P(kk-1)=F(k,k-1)P(k-1k-1)·FT(k,k-1)+Q(k,k-1)
(5)
由于系统噪声相关性的存在,融合中心无法直接按照序贯滤波的思想,对该状态一步预测值进行融合更新.为此,本文基于迭代正交变换的思想,对各传感器的观测方程进行等价改写,去除系统噪声之间的相关性.
(1)去除第一类相关性
定理1 利用辅助因子

证明 对式(3)观测方程进行如下改写:
zi(k)=Hi(k)x(k)+vi(k)+Ti(k)[x(k)-
F(k,k-1)x(k-1)-w(k,k-1)]=
(6)
其中
(7)
(8)
即上述式(6)得到的观测方程中的过程噪声和观测噪声不再相关.
□
(2)去除第二类相关性
由式(8)所示的系统噪声统计特性可知,在新的观测方程式(6)中,第一类相关性已经去除,但是第二类相关性仍存在,即不同传感器在同时刻的观测噪声之间仍然是相关的.
定理2 利用辅助因子

(9)
证明 对观测方程进行如下改写:

(10)
进而可写成

(11)
其中
(12)


(13)
即上述式(11)得到的观测方程中的过程噪声和观测噪声不再相关.
□
2.2 序贯滤波
依据序贯滤波的思想,k时刻各传感器的观测值zi(k)(i=1,2,…,N)依次到达融合中心,分别用其对x(k)的估计值进行更新,当所有观测值全部到达时,即可得到全局估计
x^
(k|k).


x^i(k|k)=x^i-1(k|k)+Ki,1(k)·[z*i(k)-H*i1(k)x^i-1(k|k)-H*i2(k)x^i-1(k-1|k)]Pi(k|k)=Pi-1(k|k)-Ki,1(k)H*i1(k)Pi-1(k|k)-Ki,1(k)H*i2(k)Pi-1(k-1|k)Pi(k-1|k)=Pi-1(k-1|k)-Ki,2(k)H*i1(k)Pi-1,2(k|k)-Ki,2(k)H*i2(k)Pi-1(k-1|k)Pi,2(k|k)=Pi-1,2(k|k)-{Pi-1(k|k)(H*i1(k))T+Pi-1,2(k|k)(H*i2(k))T}KTi,2(k)x^i(k-1|k)=x^i-1(k-1|k)+Ki,2(k)·[z*i(k)-H*i1(k)x^i-1(k|k)-H*i2(k)x^i-1(k-1|k)]
(14)
其中

(15)

(16)
在k时刻,该序贯式融合滤波过程的起始条件为
x^
0(k|k)=F(k,k-1)
x^
(k-1|k-1)
x^
0(k-1|k)=
x^
(k-1|k-1)
P0(k|k)=F(k,k-1)P(k-1|k-1)·
FT(k,k-1)+Q(k,k-1)
P0(k-1|k)=P(k-1|k-1)
P0,2(k|k)=F(k,k-1)P(k-1|k-1)
当i=N时,融合中心可以得到
x^
N(k|k)、PN(k|k),由此可知x(k)的全局估计为

x^(k|k)=x^N(k|k)P(k|k)=PN(k|k)
(17)
3 算法分析
本文基于迭代正交变换的思想,提出了一种低维序贯式融合滤波算法用来处理过程噪声与观测噪声一步互相关、各观测噪声一步自相关时的多传感器融合滤波问题.本文算法流程图如图1所示.

图1 算法流程图
通过分析可知,本文算法具有以下特点:
(1)本文算法利用低阶迭代正交变换,通过两次观测方程的改写,将原来过程噪声与观测噪声一步互相关、各观测噪声一步自相关的融合滤波问题转化为噪声不相关的融合滤波问题,有效地解决了系统噪声相关性对融合滤波过程的影响.
(2)本文算法是在LMMSE意义下严格推导得到的,因而能够在LMMSE意义下实现系统状态的最优融合估计.
(3)本文算法在去掉两类相关性之后,是按照序贯滤波的思想依次处理到达融合中心的观测信息,能够保证滤波过程的实时性.
(4)与文献[9-10]相比,本文算法有效地避免了高维矩阵的求逆运算,降低了滤波处理对系统运算能力的需求.
4 计算机仿真
两个传感器观测噪声分别为
A1=(4 8);A2=(4.5 7.5);ξ1(k)、ξ2(k)是互不相关的高斯白噪声序列,且满足如下特征:
系统的初始值为
各传感器的采样周期T=1 s.
通过分析仿真结果,比较本文算法与测量值扩维融合算法、文献[10]算法的精确度.分别比较3种算法的绝对误差均值.由表1可以看出本文算法与测量值扩维融合算法、文献[10]算法有相同的计算精度.

表1 3种算法的绝对误差均值
仿真结果如图2、3所示,分别比较3种算法的估计值和绝对误差.

图2 估计值曲线
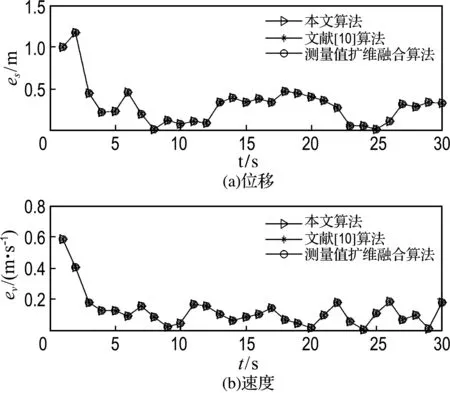
图3 绝对误差曲线
由仿真结果可以看出,本文算法能够有效处理过程噪声与观测噪声一步互相关、各观测噪声一步自相关的多传感器融合滤波问题,可以得到与文献[10]和最优的测量值扩维融合算法相同的精确度,说明本文算法在LMMSE意义下是最优的.此外,本文算法还具有序贯滤波方法可递归计算、实时性好等优点.
5 结 语
本文针对多传感器系统在遭遇过程噪声与观测噪声一步互相关、各观测噪声一步自相关场景时的融合滤波问题,基于低阶迭代正交变换,提出了一种新的低维序贯式融合滤波算法,能够通过所提出的解相关方法将观测方程经过两次改写之后转化为噪声不相关的等价观测方程,然后依据序贯滤波的思想,依次处理到达融合中心的观测信息,能够保证融合滤波过程的实时性,有效降低了融合滤波过程对系统高维矩阵计算能力的需求,而且能够实现LMMSE意义下的最优估计.
本文主要考虑了过程噪声与观测噪声一步互相关、各观测噪声一步自相关的噪声相关场景.将本文算法推广到过程噪声与观测噪声同时多步相关的一般性噪声相关场景将是下一步研究工作的重点.
[1] FU An-di, ZHU Yun-min, SONG En-bin. The optimal Kalman type state estimator with multi-step correlated process and measurement noise [C] // Proceedings of the International Conference on Embedded Software and Systems, ICESS 2008. Piscataway:IEEE Computer Society, 2008:215-220.
[2] SONG En-bin, ZHU Yun-min, YOU Zhi-sheng. The Kalman type recursive state estimator with a finite-step correlated process noise[C] // Proceedings of the IEEE International Conference on Automation and Logistics, ICAL 2008. Piscataway:IEEE Computer Society, 2008:196-200.
[3] JIANG Pei, ZHOU Jie, ZHU Yun-min. Globally optimal Kalman filtering with finite-time correlated noises [C] // 2010 49th IEEE Conference on Decision and Control, CDC 2010. Piscataway:IEEE, 2010:5007-5012.
[4] SONG En-bin, ZHU Yun-min, ZHOU Jie,etal. Optimal Kalman filtering fusion with cross-correlated sensor noises [J]. Automatica, 2007, 43(8):1450-1456.
[5] 段战胜,韩崇昭. 相关量测噪声情况下多传感器集中式融合跟踪[J]. 系统工程与电子技术, 2005, 27(7):1160-1163.
DUAN Zhan-sheng, HAN Chong-zhao. Multi-sensor centralized fusion tracking with correlated measurement noises [J]. Systems Engineering and Electronics, 2005, 27(7):1160-1163. (in Chinese)
[6] 段战胜,韩崇昭,党宏社. 测量噪声相关情况下的多传感器数据融合[J]. 计量学报, 2005, 26(4):360-363, 367.
DUAN Zhan-sheng, HAN Chong-zhao, DANG Hong-she. Multi-sensor data fusion with correlated measurement noises [J]. Acta Metrologica Sinica, 2005, 26(4):360-363,367. (in Chinese)
[7] 张安民,韩崇昭. 测量噪声相关线性系统异类传感器航迹融合[J]. 电子与信息学报, 2005, 27(3):471-473.
ZHANG An-min, HAN Chong-zhao. Tracking fusion with dissimilar sensors for linear systems [J]. Journal of Electronics & Information Technology, 2005, 27(3):471-473. (in Chinese)
[8] 吕 楠,孙书利. 带相关噪声多传感器时滞系统分布式融合估值器[C]//2008-第七届智能控制与自动化世界大会论文集. 皮斯卡特维:电气和电子工程师协会, 2008:1363-1368.
LV Nan, SUN Shu-li. Distributed fusion estimators for multi-sensor time-delay systems with correlated noise[C] // Proceedings of the 7th World Congress on Intelligent Control and Automation, WCICA′08. Piscataway:IEEE, 2008:1363-1368. (in Chinese)
[9] WEN Chuan-bo, CAI Yun-ze, WEN Cheng-lin,etal. Optimal sequential Kalman filtering with cross-correlated measurement noises [J]. Aerospace Science and Technology, 2013, 26(1):153-159.
[10] FENG Xiao-liang, GE Quan-bo, WEN Cheng-lin. An optimal sequential filter for the linear system with correlated noises [C] // 2009 Chinese Control and Decision Conference, CCDC, 2009. Piscataway:IEEE Computer Society, 2009:5073-5078.
A novel sequential fusion filtering for multi-sensor system with noise correlations
NING Tao1, WEN Cheng-lin1, YANG Yan-ping2, FENG Xiao-liang*1
( 1.College of Electrical Engineering, Henan University of Technology, Zhengzhou 450001, China;2.Yellow River Conservancy Technical Institute, Kaifeng 475004, China )
A novel low-dimension sequential fusion filtering algorithm is proposed for the multi-sensor fusion filtering problem with two kinds of system noise correlations: process noise and measurement noise with one-step cross-correlations, the measurement noise with one-step auto-correlations. Based on the low-dimension iterative orthogonal transformation, the method of decorrelation is proposed, by which the measurements can be equivalently transformed as new forms without system noise correlation. Then, combining the idea of sequential filtering, the measurements can be dealt with according to their arriving sequence. Thus, a real time sequential fusion filtering algorithm is obtained. The total deduction is conducted exactly in the sense of linear minimum mean square error (LMMSE), therefore the fusion estimation of system state is optimal. The final simulation verifies the optimality of the proposed algorithm in dealing with the above noise correlation problem.
sequential fusion filtering; noise correlation; multi-sensor system
1000-8608(2016)02-0208-06
2015-10-05;
2015-11-30.
国家自然科学基金资助项目(61304258,61174112,61371064);河南省教育厅自然科学研究项目(15A413011);河南工业大学省属高校基本科研业务费专项资金资助项目(2015RCJH14).
宁 涛(1990-),男,硕士生,E-mail:635514952@qq.com;冯肖亮*(1984-),男,博士,讲师,E-mail:fengxl2002@163.com.
TP13
A
10.7511/dllgxb201602015