立体式全球电磁环境感知系统设想
2016-12-01夏宇垠吴一明吴海斌
夏宇垠,吴一明,吴海斌
(1.中国航天科工集团8511研究所,江苏 南京 210007;2.装备发展部军代局驻南京地区第二军代室,江苏 南京 210007)
立体式全球电磁环境感知系统设想
夏宇垠1,吴一明1,吴海斌2
(1.中国航天科工集团8511研究所,江苏 南京 210007;2.装备发展部军代局驻南京地区第二军代室,江苏 南京 210007)
介绍了立体式全球电磁环境感知系统的构建思路:以高轨卫星实现全球瞬时无缝隙电磁环境覆盖(瞬时感知);以低轨卫星实现区域电磁环境探测(区域增强探测);以临近空间或机载平台实现电磁环境识别和重点目标定位(分析电磁环境、识别和定位重点目标)。立体式全球电磁环境感知系统以空、天电磁环境探测为网络,建立全球电磁态势数据库(含可视化),实现在任何时间查阅任何区域内的电磁信号分布情况,分级分类为用户提供全球各区域实时、动态的电磁环境分布态势。
全球;电磁环境监测;多平台;关键技术
0 引言
在信息化战场上,电磁环境已经成为与气象环境、地理环境、社会环境等传统类型的战场环境同等重要的环境因素[1]。及时、动态地掌握全球电磁态势对国防安全、军事战略部署、海外军事活动有着重要意义。随着信息化技术的飞跃发展,各类军用民用电磁设备广泛用于通信、航空、传感、定位、情报获取、信息处理等领域,加剧了地表电磁环境的复杂性。
复杂电磁环境的特性决定了电磁环境监测应采用立体化的手段。主要方式是将不同平台上的电磁环境监测装备综合起来,形成全球海、陆、空、天一体化的电子侦察网[1]。本文按中高轨卫星、低轨卫星、临近空间、机载等不同层次,提出构建立体式全球电磁环境感知系统的思路。
1 中高轨卫星实现全球瞬时无缝隙电磁环境监测覆盖
天基信息系统由于其得“天”独厚的地理位置优势,已经成为现代作战信息获取军事情报、主宰战场空间、确保军事优势的关键因素之一。各国在轨运行航天器中,军用卫星约占总量的三分之二以上。据有关数据统计,在近20年美军发动的几次局部战争中,天基信息系统提供的信息占到70%以上,而中高轨电子侦察卫星是美军电子侦察卫星发展的重要方向之一。从斯诺登披露的近几年美国“黑色航天”预算来看,高轨和低轨信号情报卫星的预算比例基本保持在2∶1。
我国目前在轨运行的中高轨卫星大多是导航卫星、中继通信卫星,根据美国忧思科学家网站统计,截至2014年8月1日,我国共有30颗同步轨道卫星,包括20颗通信卫星和10颗导航卫星[2]。中高轨卫星研制成本和发射成本都很高,在非电子侦察类的卫星平台搭载电磁监测载荷,是实现大范围电磁环境监测的有益尝试。文献[3]运用STK软件,研究了基于中轨道卫星(MEO)的电磁环境载荷搭载方案。研究表明,在2个MEO轨道面上各布置3颗搭载电磁环境监测载荷的卫星(监测天线波束覆盖范围大于±13°),即可实现全球瞬时无缝隙覆盖。
基于中高轨卫星的电磁环境监测可满足大范围、连续性长时间监测的需求,但灵敏度和定位能力是需要解决的问题。
从灵敏度角度分析,相同辐射源目标到达天线口面积的信号功率与侦察距离的平方呈反比关系。例如,到达低轨卫星(600km)的信号能流密度比到达高轨卫星(36000km)高35.6dB。因此高轨卫星一般采用大型天线,例如美国的“大酒瓶”(Magnum)静止轨道电子侦察卫星,其伞状的侦察天线直径高达100m,折叠后仍不能用火箭发射,只能搭乘航天飞机升空[2]。天线增益是制约监测灵敏度提高的瓶颈。
从定位能力分析,高轨电子侦察卫星的定位方式有多星时差频差定位、单星的比幅测向法。文献[4]研究了一种基于高轨星座的四星时差定位方法,在星座构型比较好的情况下,对具备一定高程的空中目标定位精度可达50km。工程中较为常见的高轨卫星定位方法是基于高增益天线的单星二维比幅测向定位。单星测向定位的难点是其定位精度随卫星高度增加而递减。在测向精度0.5°的条件下,中轨道卫星只能实现200km左右的定位精度。因此,对辐射源定位不应作为中高轨电磁环境感知系统的主要任务。
从中高轨卫星的特点而言,其主要任务是实现大范围、长时间的全球电磁环境普查。从电磁环境的变化判断核爆、局部战争等紧急事件的发生。
2 低轨卫星实现区域增强探测
相对于中高轨卫星,低轨卫星可以侦收到更高信噪比的信号。在中高轨卫星监测的基础上,结合低轨卫星实现重点区域的增强探测。增强探测主要是指信号层面的精细化分析以及辐射源的精准定位。
随着微电子、微机电、组网技术的飞速发展,世界各国都十分重视航天领域的微小型技术,如“智能卵石”计划、“新盛世”计划、“铱星”计划、GLOBE STAR计划等。利用低轨的微纳卫星群组网进行区域增强探测是电磁环境监测发展的趋势[5]。微纳卫星群组网由若干个卫星群组成,即使无法做到高轨卫星的“凝视”观测,也可实现对重点区域较短重返周期的感知。微纳卫星群群内卫星间距较近,根据编队内卫星的多少及辐射源目标信号的特点综合采用时差定位、频差定位或时频差联合定位。编队内卫星间具有较强的通信能力,如互传全脉冲或部分中频数据;群间的卫星相距较远,只进行低速信息交换,如互传指令或目标位置信息等。低轨微纳卫星组网区域增强探测如图1所示。
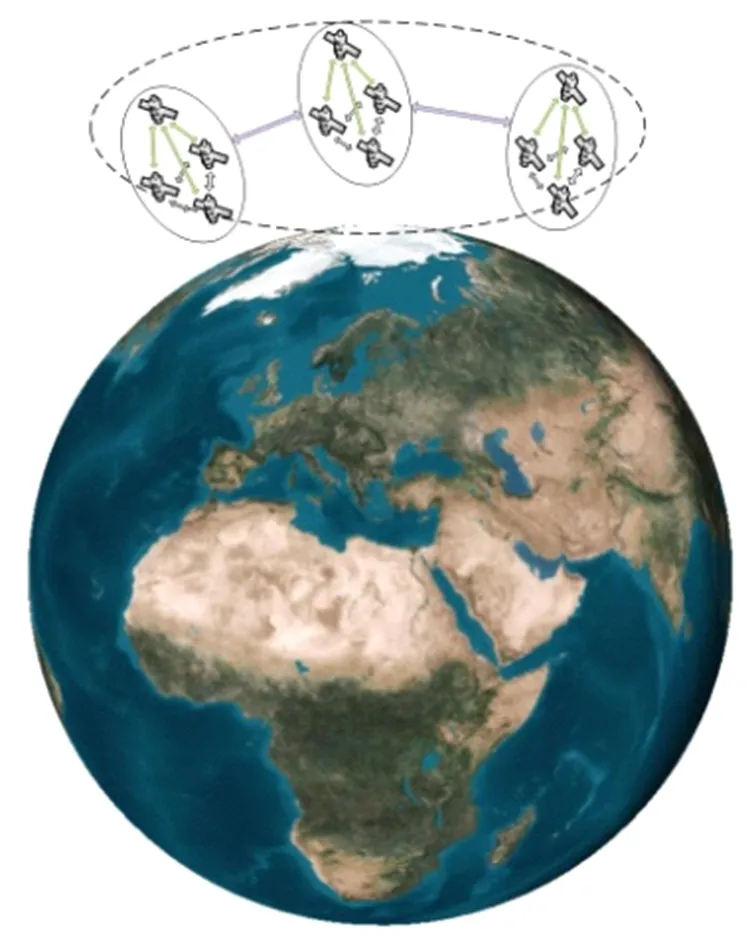
图1 低轨微纳卫星组网区域增强探测
微纳卫星群观测节点多、定位体制灵活,可获得较好监测效果,甚至具备空中动目标的无源定位能力。下面对4颗微纳卫星实现对空中动目标定位进行仿真,其中3颗星同高度轨道面,轨道高度600km,组成正三角构型,基线长度120km,第4颗星轨道高于3颗星,其高度差500km,时差测量精度18ns,时统精度7ns,卫星绝对定址精度15m,相对定址精度5m,测速误差0.1m/s。选定目标位置位于星下点1000km处,仿真结果如图2所示。
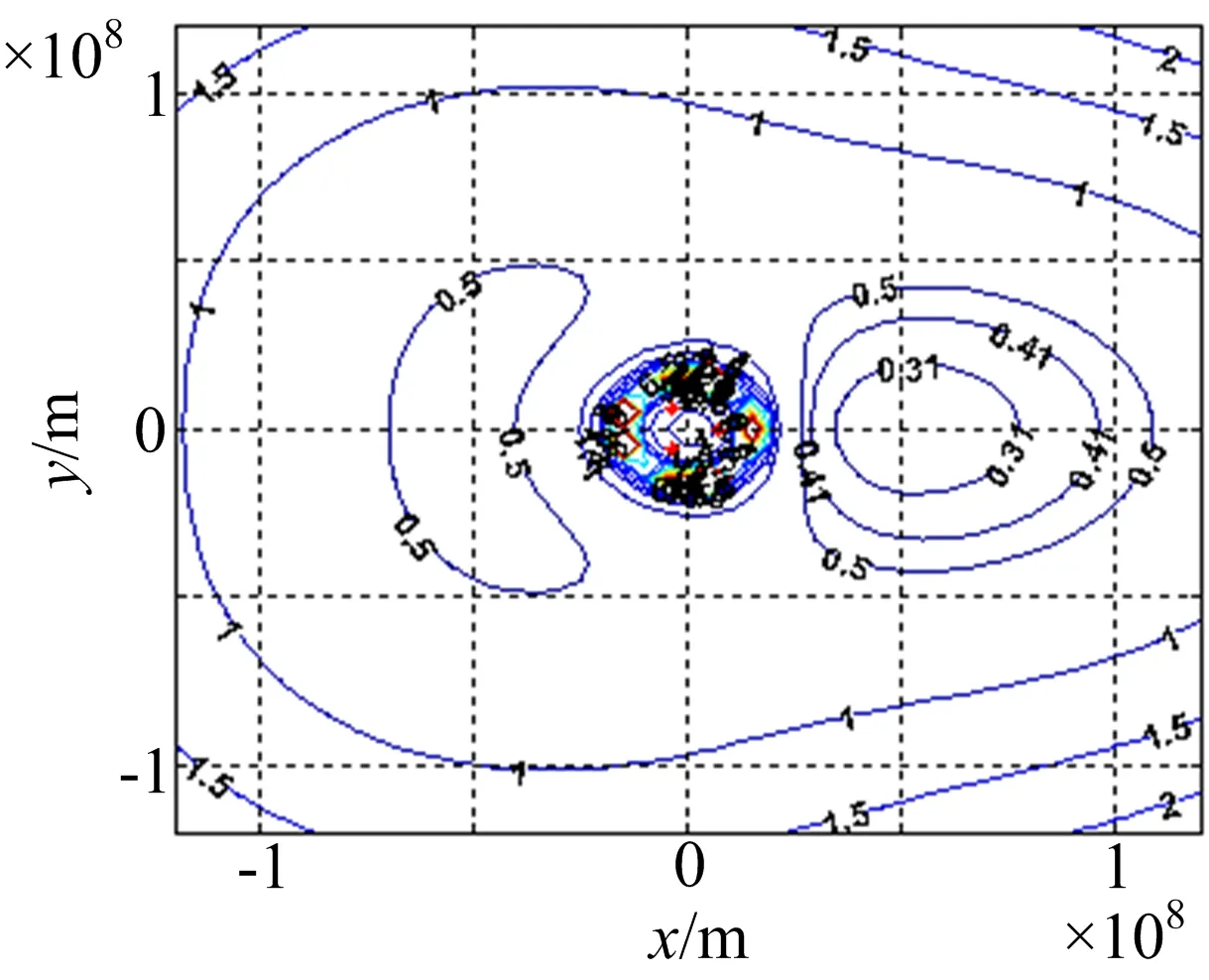
图2 4星对空中动目标定位精度(轨道高度600km)
微纳卫星技术较好地解决了传统电子侦察卫星的几点问题:研制周期短,满足快速响应需求;大量使用COTS商业货架产品与器件,降低了研制成本;一颗或几颗卫星的失效基本不影响系统整体效能,可通过快速发射补充或增强现有侦察能力。
3 机载平台/临近空间实现电磁环境识别和目标平台识别
3.1 机载平台
相对于其他平台的监测手段,机载电子侦察装备的发展最为完善。其技术水平高、作战能力强,已成为获取战场情报的主要手段。许多军事大国尽管空间有多个侦察卫星,地面有多个侦察台站,但仍然斥巨资发展和改进航空电子侦察装备,推进装备向着综合化、网络化发展。进入新世纪以来,使用无人机平台遂行战场航空电子侦察任务有了迅速发展。但从总体上看,以有人机为平台的航空电子侦察仍然占核心主导地位[6]。
3.2 临近空间平台
临近空间是指距离地面20~100km的区域。美军将空间飞行器作为未来电子战/信息战任务载荷的一个重要平台,其确定的临近空间飞行器应用方向包括ISR、通信中继、远距离/超视距通信、空中预警与重点目标实时跟踪等。临近空间平台包括平流层飞艇、平流层气球、高空长航时无人机、平流层漂浮平台等[7-8],如图3和图4所示。
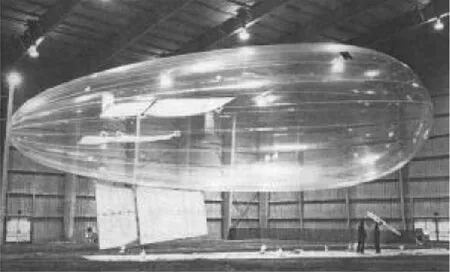
图3 美国SOUNDER平流层飞艇

图4 美国“全球观察者”氢动力无人机
3.3 特点以及作用
与低轨卫星平台相比,机载平台/临近空间的电磁环境感知手段有以下特点:
1)更高的信噪比和更小的观测区域
机载平台/临近空间电磁环境感知系统与目标辐射源间的距离是低轨卫星的1/100~1/10,相同辐射源到达系统天线的功率要比卫星高40~20dB;同时,其观测区域面积是低轨卫星的1/10000~1/100,面临的电磁环境复杂程度也更低。更高的信噪比、更低的电磁环境复杂度,意味着系统能更好地实现信号检测、样式识别甚至基于细微特征的个体识别。
2)更强的处理能力
恶劣的空间环境使得卫星平台有效载荷技术难度高,导致星上处理能力较弱。星地数传同时制约了地面处理的开展。而机载平台/临近空间有效载荷技术难度低,载重和载荷安装空间的限制少,使得其具备更多的设备资源以实现更复杂的信号/信息处理。
因此,机载平台/临近空间平台感知系统的功能应包括辐射源航迹形成、辐射源型号/平台识别以及复杂电磁环境识别等。
1)航迹形成
对于机载平台/临近空间平台而言,没有过顶时间的概念。特别是临近空间飞行器,可对关注区域进行长时间观测。例如美军在研的长期驻空平流层飞艇可以实现几个月甚至几年的驻空时间[9]。长时间的连续观测是形成辐射源航迹的前提条件。
2)辐射源与平台识别
辐射源识别(EID),是指将测量的辐射源特征参数与数据库模板特征参数进行匹配比较,推导出辐射源型号的过程。在辐射源识别设别的基础上,结合其他信息,如目标位置、速度等,可对平台进行识别。辐射源与平台识别是涉及综合化信号/信息处理的过程,需要考虑特征参数存在区间和残缺条件下的识别、多功能辐射源识别等复杂问题。
3)复杂电磁环境识别
复杂电磁环境识别是指从探测的电磁环境数据中分析其构成(通信信号、雷达信号、光电信号、电子对抗信号、民用电磁信号和自然电磁信号),从而全方位地掌握空间内电磁环境分布,而不仅仅只局限于了解电磁频谱的时域、频域和能量分布。
基本的实现思路是多方面、多渠道掌握电磁环境的构成方式(如国际电信联盟公布的用频规定、欧洲频率信息管理系统用频规定、中国无线电台的用频管理规定等),建立先验频谱库。
将监测的电磁环境数据与先验频谱特征库进行比对,进行时频域滤波,进而实现复杂电磁环境的识别。
4 立体式全球电磁环境感知系统构成及关键技术
4.1 系统构成和工作模式
天基、空基多观测站以及地面处理站构成了立体式全球电磁环境感知系统,其组成如图5所示。
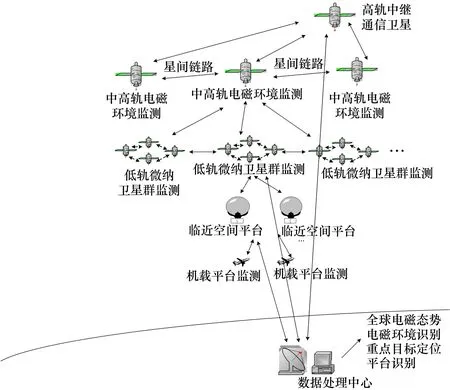
图5 立体式全球电磁环境感知系统组成
立体式全球电磁环境感知系统的主要工作模式如下:
1)若干颗中高轨电磁环境监测卫星实现全球瞬时覆盖,各颗卫星将监测数据通过星间链路传输至高轨中继通信卫星。中继通信卫星将数据回传至地面数据处理中心形成全球电磁环境态势。
2)地面数据处理中心将全球电磁环境态势作为引导信息,上注至低轨微纳卫星群,开展区域增强探测,并将其感知信息回传至地面数据处理中心。
3)低轨微纳卫星群进一步引导机载平台/临近空间电磁环境感知系统进行监测,形成辐射源航迹、辐射源类型/平台信息、电磁环境构成数据等。
4)临近空间作为通信中继,将机载平台、临近空间感知信息回传至地面数据处理中心。
5)地面数据处理中心开展综合化处理,完成立体化感知。
4.2 关键技术
下面从可视化、数据压缩、载荷小型化设计等方面,对立体式全球电磁环境感知系统可能涉及的关键技术进行阐述。
1)可视化技术
电磁环境可视化技术是通过数据融合和挖掘处理技术,以建立电磁环境可观化仿真系统为显示手段,将各平台监测的电磁环境数据,根据频率,时间、空间、能量等选择条件,分级分层以二维或三维的视景直观地显示出来[10]。电磁环境的可视化最基本的方法是通过各种图表来进行可视化展示,包括直方图、曲线图、雷达图、三维图等。利用一些信息化的报表工具,从主题数据库中导出相应的图表来进行多种形式的展示。更进一步地,可通过地理信息系统(GIS)及一些其他的应用系统,来进行电磁环境可视化的综合展示。技术人员可以把地理信息系统所提供的区域地图作为背景,而主题数据库中的基础数据通过多种形式(如不同的颜色、图标等)加以表示和区分,并反映到地图上,以此来形象地展现出特定区域的特定电磁环境情况和变化过程;还可以把这些基础数据导入一些决策分析系统,利用相关的数学模型,进行线性拟合、回归分析等计算,来实现对未来电磁环境变化情况的预测。
2)数据压缩
电磁环境基础数据的数据量极大,特别是对立体式全球电磁环境感知系统而言。因此在前期对这些基础数据进行压缩是非常必要的,可以利用压缩感知的技术,对数据进行总体的压缩和解压,以减少网络传输的数据量[11]。
若要在较大的频率范围内确定信号的频谱,按照奈奎斯特定理,所需的采样率可能会非常高,甚至超过了现有采样技术能达到的性能。压缩感知技术的原理在于寻找合适的稀疏域,将信号在此稀疏域内压缩后进行参数估计。可实现对信号精确或近似地重构。压缩感知技术很大程度地减少了测量时间、采样速率及设备量,因此非常适合于电磁环境感知系统大数据的应用情景。
3)数据查询技术
电磁环境监测信息查询技术需要利于对监测信息进行浏览、开发、挖掘。因此不单单仅呈现频域、时域、地域、功率域等的监测结果,还要对这些结果进行取舍、建立关联、融合处理,提供更进一步的、直接对决策提供支撑的电磁环境监测信息,并将它以直观的视觉形象呈现出来,加强监测信息的认知。需要拓展电磁环境监测信息的查询种类范围,提供更多的查询方式,提高查询的全面程度和准确程度;要提供更多的结果生成种类,改善查询的感知能力[12]。
4)载荷小型化设计
电磁环境监测载荷本身不对外辐射电磁信号,与平台的接口仅为电源和数传,本身不会影响平台的工作,是一种理想的搭载载荷。目前传统电磁环境监测载荷的设计思路是以离散器件组合,即使采用优化结构、微组装等手段对载荷质量体积进行优化,但对小型化的贡献依然是很有限的。目前高性能、高集成度软件定义无线电(SDR)芯片的发展使得小型化载荷的设计变为可能。这种新型芯片的内部集成了模拟滤波器、混频器、放大器和数模转换器等[13],使得载荷质量有望控制在500g以内。对低等级SDR器件进行评估筛选以及辐射屏蔽加固,保证其环境适应性是必须要开展的工作。
5 结束语
本文按中高轨卫星、低轨卫星、临近空间、机载等不同层次,提出构建立体式全球电磁环境感知系统的思路,并对需要开展研究的关键技术进行了梳理,以期形成全球一体化的电子侦察系统。■
[1] 刘培国.电磁环境基础[M].西安:西安电子科技大学出版社,2010.
[2] 刘海印,桐慧.美军空间态势感知装备发展重要动向及影响[J].国际太空,2015(7):47-51.
[3] Chen Yu,Wu Yiming,Liu Xinglin.Optimal configuration analysis of electromagnetic environment load in Global Navigation Satellite System[C]∥第五届航天技术创新国际会议论文集,2013.
[4] 顾黎明,朱建丰,何新生.高轨四星时差定位技术研究[J].通信对抗,2014,33(1):23-26.
[5] 石荣,张伟.研发微纳电子侦察卫星面临的挑战与思考[J].航天电子对抗,2015,31(4):1-5.
[6] 王宇光,蒋盘林.机载信号情报侦察系统面临的挑战及发展趋势[J].通信对抗,2015,34(2):1-5.
[7] 谭惠丰,王超,王长国.实现结构轻量化的新型平流层飞艇研究进展[J].航空学报.2010,31(2):257-264.
[8] 祝彬,陈笑南,范桃英.国外超高空长航时无人机发展分析[J].中国航天,2013(11):28-32.
[9] 姚伟,李勇,王文隽,等.美国平流层飞艇发展计划和研制进展[J].航天器工程,2008,17(2):69-75.
[10]邓建辉,周倜.多维度电磁态势展现方法研究[J].舰船电子工程,2014,34(11):1-4.
[11]闫敬文,刘蕾,小波.压缩感知及应用[M].北京:国防工业出版社,2015.
[12]韩永生.复杂电磁环境监测通用软件架构及构件技术研究[D]. 西安:西安电子科技大学,2009.
[13]余莲.AD9361:基于突破性技术 促进软件定义无线电应用[J].电子技术应用,2013(11):1.
Construction assumption of global electromagnetic environment sensing system
Xia Yuyin1, Wu Yiming1, Wu Haibin2
(1.No.8511 Research Institute of CASIC, Nanjing 210007, Jiangsu,China;2.The Second Representative Office in Nanjing of Equipment Development Department, Nanjing 210007, Jiangsu, China)
The assumption of establishing global electromagnetic environment sensing system is introduced: high-orbit satellites achieve global seamless coverage of electromagnetic environment (instantaneous sensing), low-orbit satellites achieve regional electromagnetic environment detection (regional enhanced detection), and near-space and airborne platforms achieve electromagnetic environment recognition and important target location. The global electromagnetic environment sensing system establishes the global electromagnetic environment situation database (includes visualization). It can look through the electromagnetic signal of any region at any time, and provides real-time and dynamic global electromagnetic environment distribution for users by gradation and classification.
global; electromagnetic environment sensing; multi-platform; key technology
2016-06-15;2016-09-12修回。
夏宇垠(1983-),男,高工,博士,主要研究方向为电子侦察总体技术研究。
TN97
A