平板便携式卫星通信终端伺服系统算法设计研究
2016-11-30姜孝均李良荣
姜孝均,李良荣
(1.贵州大学,贵阳 550025;2.贵州航天职业技术学院,遵义 563000)
技术研究
平板便携式卫星通信终端伺服系统算法设计研究
姜孝均1,2,李良荣1
(1.贵州大学,贵阳 550025;2.贵州航天职业技术学院,遵义 563000)
本文针对平板便携式卫星通信终端的伺服控制系统展开研究,本文提出一种根据终端设备所在位置的经纬度信息和目标卫星的经度信息,通过对终端设备的平板天线俯仰和方位的伺服控制,自动调整天线的方位和俯仰姿态,使天线指向目标卫星,并进一步对极化角进行调整,从而快速建立起稳定的卫星通信链路的算法设计方案。
平板天线;卫星通信;伺服控制;信标机
1 引言
卫星通信系统由卫星端、地面端、用户端三部分组成。卫星端在空中起中继站的作用,即把地面站发上来的电磁波放大后再返送回另一地面站;地面站则是卫星系统与地面公众网的接口,地面用户也可以通过地面站出入卫星系统形成链路;用户端即是各种用户终端[1]。本文研究平板便携式卫星通信终端的伺服系统。
2 平板便携式卫星通信终端伺服系统简述
平板便携式卫星通信终端伺服系统是整个设备的关键,其通过与监控系统进行数据交互,得到控制参数,结合外部传感器模块收集的信息进行数据综合分析,输出信号实时控制伺服电机调整天线的姿态,达到对星通信的目的。该系统主要由Wi-Fi模块、传感器模块、存储模块、信号接收模块、电机控制模块和主控制器模块组成[2],如图1所示。
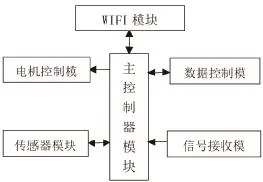
图1 伺服控制系统组成结构图
3 天线搜索与跟踪算法
天线对卫星的跟踪方式一般包括手动跟踪、程序跟踪和自动跟踪三种[3]。卫星天线定位参数为:俯仰角、方位角、极化角。下面就对这三个参数的计算做简单说明。
设地面站A的经度和纬度分别为Φ1,θ1,静止卫星经度为Φ2,经度差Φ=|Φ1-Φ2|。
3.1 方位角的计算
天线方位角

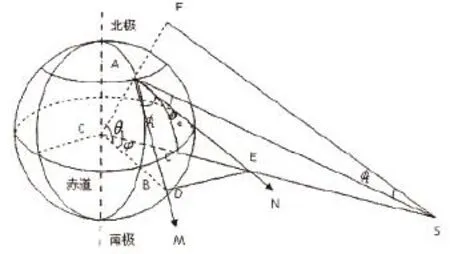
图2 方位、俯仰、极化角的计算示意图[3]
利用式(1)求出的方位角是以正南方向为基准求得的,按规定,方位角都是以正北方向为基准的,我国处于北半球西南方向,故实际位于地面站方位角可用下述方法求出

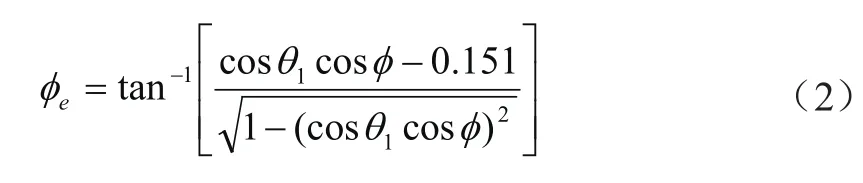
3.2 俯仰角的计算
OA和OC为地球表面距地球球心的距离用R表示,一般取地球平均半径6,378千米。所有的地球同步卫星都分布在赤道上空,其距地面的高度用h表示,一般取35,860千米,带入式子得
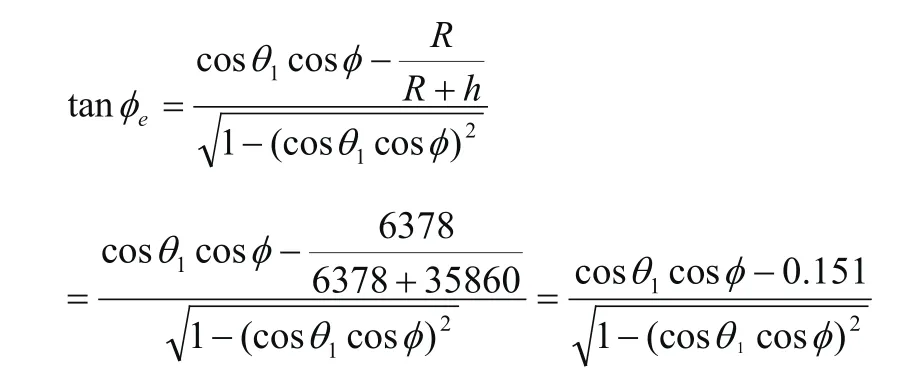
故俯仰角
3.3 极化角的计算[4]
地面站天线对准目标卫星所需的理论极化角为
3.4 地面站天线搜索算法设计
卫星信号的搜索采用程序跟踪的方法,将目标卫星的轨道信息输入天线控制器,利用GPS接收机测得地面站所在地的经纬度信息。在天线控制器中进行姿态计算后得到天线对准目标卫星所需要的方位角、俯仰角和极化角,然后驱动相应电机以实现对卫星的搜索跟踪。在对星的过程中,同时姿态传感器不断检测天线波束的实际指向信息,得出天线实际角度和理论角度差值,天线控制器运算出输出伺服电机的驱动信号,反复调整天线的方位、俯仰和极化方向,迫使天线最终指向卫星。以俯仰系统为例。俯仰系统的电机驱动信号,是由安装在天线下方的俯仰倾斜角传感器感应获取信号反馈给控制器,控制器判断该角度信息与理论角度信息之间的差值,与信标接收机输出的AGC电平值综合计算,输出控制指令给俯仰电机的驱动器,驱动天线转动,反复多次的调整使差值不断减小直至对准。如图3所示。
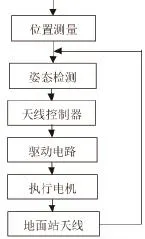
图3 俯仰系统转动控制流程
3.5 天线跟踪算法设计
经过卫星信号的搜索,天线进入能收到信号的范围,但是收到的信号强度较弱,距离信号最强指向还有一定的角度差值。为了使信号接收效果达到最佳,需进入跟踪状态,进一步做天线指向的精对准。处于跟踪状态的天线控制系统采用的是闭环步进跟踪的方法,为做到精对准,电机每走一步天线转过的角度相对于搜索阶段应减小,这个通过细分驱动芯片来实现。方位和俯仰电机按照顺序转动一圈,电机每走一步,就比较此时信标接收机输出的AGC电平与之前一次输出的AGC电平的大小,如果AGC电平变大,则电机在同方向继续走一步,反之,则改变跟踪方向。转动一圈后,卫星信号就包含在这个圈内,然后再减小电机的步进角,继续之前的方法跟踪。如果在跟踪几圈后发现信标接收机输出的AGC电平一直大于(或等于)跟踪门限电平,则认为天线已经对准卫星,跟踪过程结束,如图4所示,在通信的过程中跟踪是个动态过程。

图4 闭环步进电机转动控制图
4 结束语
项目研究基于北京某研究所设计,学院生产制造的一款“平板便携式卫星通信终端”产品,通过该伺服系统对方位、俯仰和极化角的控制,精确实现了用户端与卫星端的通信链接,并进行卫星通信试验通信,达到了预期设计指标。本项目研究经验为整体项目的完成,打下了良好基础,研究的成果,可以移植应用到需要精确定位的设备伺服系统之中,有良好的应用前景。
[1] 郭庆,王振永,顾学迈.卫星通信系统[M].北京:电子工业出版社,2010.6
[2] 赵海龙.便携式卫星天线控制系统的设计与研究[D].北华航天工业学院,2014
[3] 范丽娟.便携式卫星通信控制系统研究与设计[D].南京理工大学,2010
[4] 王民,冉莉.便携卫星天线精确定位研究[J].中国科学信息,2013(7):94
Algorithm Design of Servosystem for Flat Plate Portable Satellite Communication Terminal
Jiang Xiaojun1,2,Li Liangrong1
(1.Guizhou University,Guiyang,550025;2.Guizhou Aerospace Vocational and Technical College,Zunyi,563000)
The purpose of this paper is to study servosystem for Flat Plate Portable Satellite Communication Terminal.In this paper,we propose a longitude information of the latitude and longitude information and the target satellite,which is located at the location of the terminal equipment.Through the servo control of the antenna's elevation and azimuth of the terminal device to set up fast algorithm design stability of the satellite communication link.The azimuth and elevation of the antenna are adjusted automatically to make the antenna point to the target satellite,and the polarization angle is adjusted further.
Patch Antenna;Satellite Communication;Servo control;Beacon machine
10.3969/J.ISSN.1672-7274.2016.05.003
TN927+.2,TN828.5 文献标示码:A
1672-7274(2016)05-0009-03
姜孝均,男,1977年生,四川云阳人,讲师,硕士,研究方向为电子与信息系统。
李良荣,男,1963年生,贵州遵义人,教授,研究方向为电路与系统、电磁场与微波技术、电子通信工程、电子信息工程。
