基于Recurdyn的可变径攀登平台的最大受力仿真与分析
2016-11-30薛珊张博徐龙赵运来杨浩然缪海峰
薛珊,张博,徐龙,赵运来,杨浩然,缪海峰
(长春理工大学 机电工程学院,长春 130022)
基于Recurdyn的可变径攀登平台的最大受力仿真与分析
薛珊,张博,徐龙,赵运来,杨浩然,缪海峰
(长春理工大学 机电工程学院,长春 130022)
风塔塔筒表面不平的缺陷是造成攀爬平台受力畸变的主要原因。受力畸变的情况下,如何找到最大受力成为难题,如果不能解决这个问题后续结构分析将无法进行。针对此问题,对设计的一种可变径风塔攀登平台进行了多体动力学仿真,对所有可能受力的情况进行了分析,并进行了排列组合和必要的推论,最后用Recurdyn对推论加以仿真验证,得出了攀登平台桁架之间受力最大的情况,分析出了最大节点受力值。分析的过程和结果给进行类似分析的学者提供了参考。
多体动力学分析;Recurdyn;攀登平台;仿真
风能是一种清洁能源,况且蕴藏丰富,利用率高,目前风力发电是风能的主要利用形式[1]。而风力发电塔是风力发电的主机承受部件,按结构来分,它分为圆钢筒结构、桁架式结构和混凝土结构。而圆筒结构的塔筒由于维护的方便,在行业中应用最广[2]。
但是圆钢筒结构的塔筒分为3~4段,整体结构采用锻造法兰连接,每一段都是首尾焊接而成的,整个塔筒低的有几十米,高的有一百多米[3]。所以这样高耸的风塔结构势必会为安装和维护带来困难,为了解决这个问题,设计了一种可变径攀登平台。此攀登平台的作用是可以将人和物品运送到高耸的风塔顶端,而可变径攀登平台的重要组成部件为桁架,它的主要作用是随着平台的升高而自动改变其半径,从而适应塔筒随着高度增加而逐渐变小的半径。
设计的桁架能否满足功能和刚度、强度要求是设计可变径攀登平台的关键。桁架能否满足刚度、强度要求,关键在于找到桁架在上升过程中的最大受力之处,最大受力的值。如何找到桁架在上升过程中的最大受力之处,进行受力分析,成为热点研究问题。如果不能解决此问题,后续桁架的结构分析将无法进行。
本文就是运用Recurdyn软件对桁架上升过程中的各种受力情况进行分析,仿真,最终找到最大受力处和最大受力值。为进一步设计攀登平台做好准备。
1 可变径桁架的设计
1.1 设计要求
可变径攀登平台主要实现将维护人员和物品送到塔端,整个过程靠磁力吸附,使平台始终紧贴塔筒,保证运维人员的安全;靠车轮与塔筒壁的摩擦力来提供向上的力,使平台平稳地向上运动;桁架作为主要的受力部件和随动部件,其半径要始终随着高度的增加而减小,自适应塔筒的半径变化,且桁架整体重量要在保证其刚度、强度的条件下尽量轻盈,以最大限度地减小塔筒的负担。
所以关键部件桁架的设计要满足以下功能:
(1)桁架半径可自适式改变,要始终紧贴塔筒壁;
(2)桁架部件在保证刚度、强度的要求下尽量轻盈。
为了保证所设计的桁架的刚度、强度满足要求,需要求出桁架在运动过程中的最大受力处和最大受力。桁架在上升过程中的最大受力处和最大受力成为桁架结构分析的基础和必要的前提。
1.2 数字化建模
由于目前使用最多的塔筒底部直径范围处于4m~4.5m,所以本文按最大直径4.5m来数字化建模,目的是为了找到所有情况下的最大受力[4]。为了方便导入Recurdyn进行分析,对整个模型进行简化。运用Solidworks软件进行建模,整体结构的数字化模型如图1所示,整个桁架分为两层,每一层之间用销相连,每一层伸缩臂和伸缩副臂交叉相连,这样的交叉结构称为一个单元,每一个单元通过铰接的方式相连,每一层有12个彼此相连的单元,以下这些铰接关系称为节点。两层之间用连杆相连,通过简化模型,将其余不提供动力的10根连接杆去掉,而动力源就装在留下的这两个连杆上。因为本文主要研究桁架的受力分析,所以其余建模不予展示。对关键部件伸缩臂和伸缩副臂进行了数字化建模,分别如图1和图2所示。
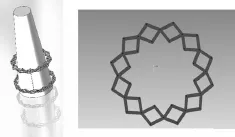
图1 可变径双层桁架的数字化模型

图2 伸缩臂和伸缩副臂的数字化模型
2 可变径桁架的多体动力学仿真
2.1 受力分析
由于目前的塔筒每一段的制作都是焊接而成的,难免会有缺陷,造成塔筒的横截面不是理想的圆形。虽然其制作过程有国标的限制,但是还是会出现如图3和图4的情况[5]。这种情况会造成桁架受力不均。桁架节点图如图5所示,1~10节点为由于塔筒的制作工艺导致的受力节点,由于每个节点都由磁铁来提供4000N的磁力[6],所以在以下的分析中,均已4000N的受力来分析。

图3 塔身变形表面
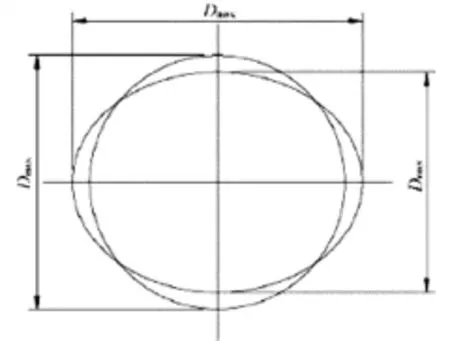
图4 塔身变形轮廓
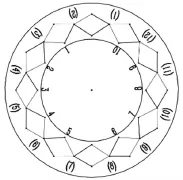
图5 可变径桁架节点标号
2.2 多体动力学分析
Recurdyn是一款多体动力学仿真软件,采用相对坐标系仿真理论和完全递归算法,是一款新型多体动力学仿真软件,由于其算法高效,使得计算速度快,工作效率高,非常适合求解大规模的多体动力学仿真问题[7]。
将模型另存为Parasolid格式导入Recurdyn中,对其添加运动副和受力关系,模型如图6所示。

图6 Recurdyn中双层桁架的模型
在所有的多体动力学仿真软件中,导致结果不准确的最容易被人忽略的也是最不好解决的问题就是冗余约束的消除,在Recurdyn中的约束不像二维约束算自由度那样简单,在多体动力学仿真软件中,是按照空间自由度来进行计算的:F=(6-m)n-∑(i-m)pi[8]。所以对于四杆机构来说添加四个铰链约束事实上是多了一个冗余约束。对于冗余约束来说,软件在计算的时候其实是会自动消除一些冗余约束来使仿真顺利地进行,但是这些冗余是计算机自动识别的,可能被消除的冗余约束正是我们想要求解的受力、运动环节,这样就造成仿真结果不准确,所以尽量使用者自己消除不必要的冗余。本文用点线副和点副来代替不必要的铰链冗余约束从而消除冗余,以解决冗余对计算结果造成的影响。
为了模拟桁架的真实受力情况,本文采用编写所有受力情况的受力函数来解决这个问题。但是为了避免不必要的计算和减轻工作量,这里将对称的受力情况暂时先去掉,将不重复的情况排列组合,当经过仿真分析找到最大受力点时,再将这种情况下的所有对称受力单独分析,最后找出同种受力个数下的最大力值所在节点,比如:当单个节点受到4000N的磁力时,如图6所示,节点2和节点4、7、9受力情况其实是对称的,在这里只需要分析节点2的受力即可,当所有的单力情况都分析完后,如果2节点受力最大,则将2、4、7、9这四种对称情况再单独分析一遍,以找出这四种同种情况的最大受力情况。这种分析方法不但准确而且高效,很大程度上减轻了不必要的工作量和函数的编写。
在这里采用step函数来编写受力函数,step函数的好处是可以防止受力突变,会以三次多项式的形式使受力缓慢增加或减小到一定值,目的是使受力情况更加稳定、使仿真结果更加精确。Step函数的基本形式是step(time,x1,y1,x2,y2),意思是从区间x1到x2,y的变化量是y2-y1。变化曲线是一个三次多项式[9-11]。
2.3 多体动力学仿真
在攀登平台运行过程中,每个节点的受力方向可能是不同的,所以在这里为了得到最大的受力作用线,先将单层模型导入Recurdyn,让其半径保持不变,受力大小都为4000N的的情况下,让其作用线从水平开始倾斜变化,从而找到最大受力作用线。仿真过程如图7~图10所示,受力曲线如图11所示。

图7 时刻1受力水平时受力作用线
图8 时刻2受力20°受力作用线
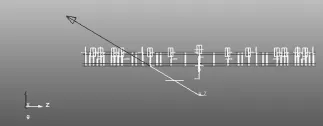
图9 时刻3受力35°受力作用线
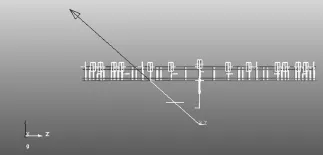
图10 时刻4受力60°受力作用线
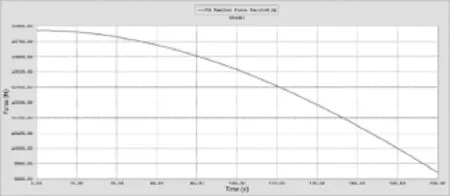
图11 节点随受力角度变化而受力变化的曲线
由图11受力曲线可知,当受力状态为水平时节点的受力是最大的,所以为了找到上升过程中最大受力,在以下的分析中,均为节点施加水平状态的力。
将整个模型导入,为每个节点添加好受力方向,先令一个节点受力为4000N,其余节点受力为0N,首先进行一次仿真,目的是为了找到受力最大的半径波动区间。仿真分析过程如图12~图14所示。
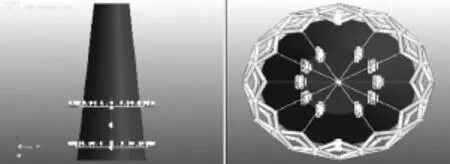
图12 仿真状态1
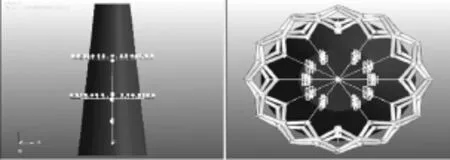
图13 仿真状态2
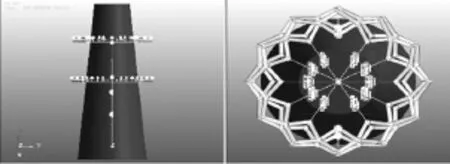
图14 仿真状态3
由图可以看出,在桁架上升的过程中,其半径是会缩小的。在这里采用倾角为5°、塔筒直径为4500mm的塔筒进行分析,首先为电机添加较大速度得到初步受力跳动曲线图,如图15所示。此时出现受力轻微跳动的原因是随着半径的收缩,伸缩臂和伸缩副臂之间的受力状态会改变,所以就存在一个找到最大受力区间的问题。

图15 受力随时间变化曲线
由图可知,当时间time=44的时候出现最大受力区间,计算出time=44时所对应的收缩直径为4423.30mm。由于是初步仿真,只是为了找出大概的跳动区间,故采用的仿真动力源的速度较大,所以为了找到精确的跳动时刻的直径,还需要将仿真步数细化,此处采用降低动力源速度,增加仿真步数来解决。将模型的新直径4423.30mm在Solidworks中修改好,让其上升到对应的高度,再次导入Recurdyn中进行细化仿真,仿真后的结果曲线如图16所示。

图16 精细化受力区间
可以看到跳动发生在大概time=21左右,为了消除误差和步数的影响,将time提升为25,再次经过计算,得出当桁架经历最大受力区间时,直径为4375mm。所以在桁架的整个运行当中,直径缩小为4375mm时受力是最大的。
将新的数据导入Solidworks中再次进行修改,导入Recurdyn中进行仿真分析。经过仿真初步仿真分析可以看到最大力点出现出正好在所要的范围之内,且可以得出下层受力和上层受力是互不影响的,所以在以后的受力函数编写上就不针对上层进行力的添加了。具体数据如图17和图18所示。
最后,编写所有情况的受力函数进行仿真分析。共有1~10情况,对应的不对称受力情况分别的3种、15种、35种、36种、68种、64种、36种、15种、3种,由于五种力以下受力情况又和五种以上受力情况是对称的,故只需分析前五种受力情况。对一个力的3种受力情况进行分析,具体曲线如图19~图21所示。
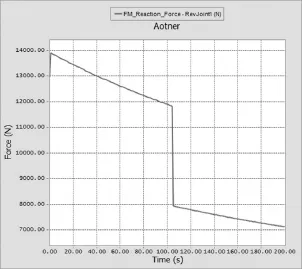
图17 重新导入下层受力变化
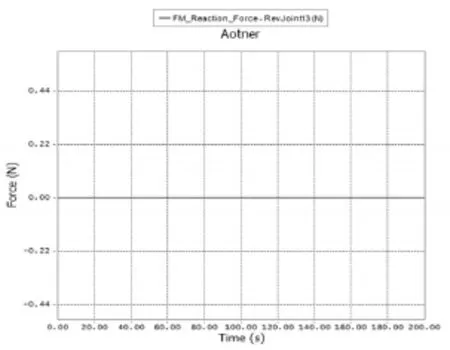
图18 重新导入上层受力变化
由图19所示,rev(2)节点受力最大,rev(2)代表就是图6中的节点(4)。可得当节点3受力4000N的力时,(4)点受力最大;将所有对称情况进行比较,发现最大受力为44248.04N,比较图线如图22所示。发现最大受力节点为点(3)。
对两个力的15种受力情况进行分析,具体曲线如图23所示,发现当节点3、8同时受到4000N的力作用时,(3)点受力最大,最大受力为71424.37N。因为节点3、8受力只有这一种情况,不存在其余对称情况,所以两个力作用时最大受力情况只有这一种。发现最大受力节点为点(3)。
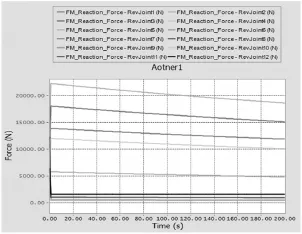
图19 (3)号节点受力时各节点受力曲线

图20 (4)号节点受力时各节点受力曲线
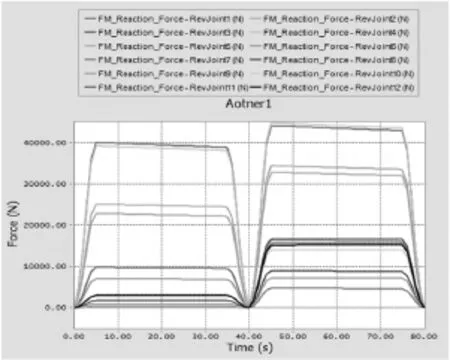
图21 (5)号节点受力时各节点受力曲线

图22 受力最大节点的所有对称分布受力曲线

图23 2个节点同时受力时各节点受力曲线
对三个力的36种受力情况进行分析,具体图线如图24所示,发现当节点2、3、8同时受到4000N的力作用时,(3)点受力最大;将所有对称情况进行比较,发现最大受力为122364.18N,比较图线如图25所示。发现最大受力节点为点(3)。
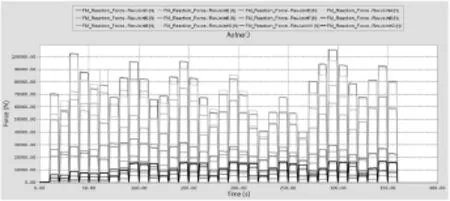
图24 3个节点同时受力时各节点受力曲线
对四个力的64种受力情况进行分析,具体图线如图26所示,发现当节点3、4、5、8同时受到4000N的力作用时,(4)点受力最大;将所有对称情况进行比较,发现最大受力为128030.83N,比较图线如图27所示。发现最大受力节点为点(3)。
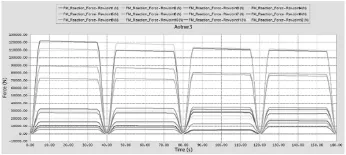
图25 受力最大节点的所有对称分布受力曲线

图26 4个节点同时受力时各节点受力曲线
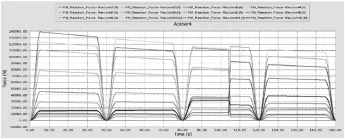
图27 受力最大节点的所有对称分布受力曲线
对四个力的68种受力情况进行分析,具体图线如图28所示,发现当节点2、3、4、5、8同时受到4000N的力作用时,(4)点受力最大;将所有对称情况进行比较,发现最大受力为166216.60N,比较图线如图29所示。发现最大受力节点为点(3)。

图28 5个节点同时受力时各节点受力曲线
经过对五种情况的受力仿真,发现最大受力节点都是点(3)。最大受力随着受力个数增加从44248.04→71424.37→122364.18→128030.83→ 166216.60(N),呈逐渐递增的趋势。所以又将所有节点的受力情况进行仿真分析,最后得出如图30的受力曲线,从图中可以看出,最大受力节点仍然是点(3),最大受力值为273958.19N。
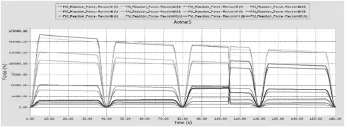
图29 受力最大节点的所有对称分布受力曲线
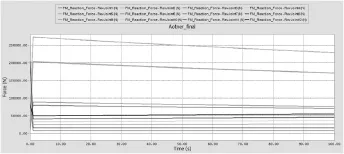
图30 所有节点都受力时各节点受力曲线
3 结论
本文针对所设计的一种可变径的攀登平台的桁架进行了多体动力学仿真,列出了所有情况下的最大受力。得出了如下结论:
(1)桁架两层的受力互不受影响;
(2)桁架的节点最大受力随着力的增加而增加;
(3)桁架的节点受力随着半径的收缩会产生力的波动,且当桁架下层收缩直径为4375mm时节点受力最大;
(4)桁架受力最大节点始终发生在节点(3)处;
(5)当10个力全都加在节点上时受力最大,且桁架伸缩臂受力最大矢量值为273958.19N。
[1] 朱晓.风能发电的现状和发展[J].科技致富向导,2014(23):154.
[2] 李应华.风电塔架及工作平台结构优化[J].机械工程师,2013(07):194-195.
[3] 郭景红.风电塔筒制作过程研究[J].科技与企业,2013(17):285
[4] 严科飞.大型风电机组塔架材料的现状和发展[J].风能,2013(03):102-103.
[5] 李斌.锥台形钢结构风力发电机塔筒制造技术[J].施工技术,2014(S2):427-428.[6] 刘枫.风力发电机塔身清洗机器人设计与研究[D].哈尔滨:哈尔滨工业大学,2013:13-13
[7] 刘义.Recurdyn多体动力学仿真[M].北京:电子工业出版社,2013:10:1-2.
[8] 焦晓娟.Recurdyn多体系统优化仿真技术[M].北京:清华大学出版社,2010.
[9] 周孔亢.基于Recurdyn的钢板弹簧动力学模型的建立与参数辨识[J].机械工程学报,2014,50(04):130-132.
[10] 钟小勇.ADAMS函数的使用技巧[J].装备制造技术,2008(11):100-101.
[11] 程军.基于虚拟样机技术的隧道掘进机管片安装的施工仿真[J].中国工程机械学报,2012,10(03):354-355.
Simulation and Analysis of the Maximum Force of Adjustable Climbing Platform Based on Recurdyn
XUE Shan,ZHANG Bo,XU Long,ZHAO Yunlai,YANG Haoran,MIAO Haifeng
(School of Mechatronical Engineering,Changchun University of Science and Technology,Changchun 130022)
The uneven surface defect is caused by wind tower tube climbing platform by force the main reason for the distortion.When the force distorted,how to find the maximum stress becomes a problem.For this problem,the design of a wind tower can be adjustable climbing platform for multi-body dynamics simulation of all possible forces were analyzed,and the permutations and necessary inferences,and finally to the inference Recurdyn to simulation,force value obtained by the maximum force the situation,analyze the maximum node between the truss by climbing platform.The results were similar to the analysis of scholars to provide a reference.
multibody dynamics analysis;Recurdyn;climbing platform;simulation
TH122
A
1672-9870(2016)05-0055-06
2016-07-04
吉林省科技发展计划项目(20126017)
薛珊(1978-),女,博士,副教授,E-mail:xueshan@cust.edu.cn
