智能车路径识别与控制性能提高方法研究及实现
2016-11-30刘立双
刘 涛,吕 勇,刘立双
(北京信息科技大学 仪器科学与光电工程学院,北京 100192)
智能车路径识别与控制性能提高方法研究及实现
刘涛,吕勇,刘立双
(北京信息科技大学 仪器科学与光电工程学院,北京 100192)
为提高智能车路径识别的准确性、实时性和鲁棒性,采用“图像采集—图像处理”交叉执行的方式,同时在图像处理阶段采用跟踪边缘检测算法,并将模糊控制算法和PID算法进行整合。整体实验结果表明,智能车的速度提高了33.3%,准确率提高了35.7%。本研究中的智能车系统可发展应用于现代汽车的辅助驾驶系统,提高智能交通的安全性。
智能车;图像采集;图像处理;路径识别;模糊控制
0 引言
对于智能车整体而言,其路径识别和控制系统是智能车运行过程的核心部分,路径识别的准确性和实时性,以及控制系统的灵敏性和鲁棒性是影响智能车运行效果的关键因素[1-2]。
目前,从智能车路径识别技术来看,通常采用“图像采集—图像处理”顺序执行的方式来实现[3-4],因此,在图像采集阶段,图像处理单元将处于空闲,从而造成图像处理单元的资源浪费;而在图像处理阶段,由于待处理的图像数据较多,导致图像处理单元在单位时间内的处理负荷较大,从而处理速度过慢,进而引起下游控制单元数据处理滞后的问题,而导致智能车路径识别的准确性及实时性较差,最终导致智能车的运行速度慢、灵活性差。
从智能车控制系统技术来看,由于智能车具有非常复杂的非线性动力系统,难以建立精确的数学模型[5]。因此,如果采用传统的PID控制算法对智能车进行控制,虽然响应速度较快,精度也较高,但是容易造成智能车控制发生阶梯式跳跃变化和路径变化反应不灵敏等问题,且易产生超调和振荡现象,导致智能车控制系统灵敏性和鲁棒性较差[6-7]。
针对上述问题,在智能车路径识别处理和控制系统两方面进行了优化。
首先,在路径识别处理方面,将“图像采集—图像处理”交叉执行,在图像采集的时间间隙中进行图像处理,而无需等到所有图像采集完成再进行图像处理,能够保障图像处理的实时性,且在图像处理阶段采用跟踪边缘算法,能够提高图像处理的效率,从而保障路径识别的准确性和实时性。其次,在智能车控制方面,采用模糊控制器和传统PID控制相结合的控制策略,既使智能车控制系统具有模糊控制的灵活性和适应性强的优点,又具有PID控制精度高响应快的优势,最终提高了智能车控制系统的灵敏性和鲁棒性。
1 路径识别处理
在智能车路径识别处理过程中,考虑到处理速度的需求,通常在保证图像信息足够的情况下取用整幅图像中的一部分[8],这种情况会导致智能车在图像采集阶段CPU会有两部分时间处于空闲时间:未被选取的行间隔期和消隐期。因此,在本研究中将充分利用这两部分时间进行图像处理,即采用“图像采集—图像处理”交叉执行的方式。
具体实施方法为:在图像采集过程中,图像采集单元是将图像分为N个单元块分别采集,当完成任一个单元块的采集时,则触发图像处理单元在空闲时间对该单元块进行图像处理。
表1以处理100帧图像所占用的时间为例,对两种图像采集处理方式进行了比对。从占用时间结果可以看出,本研究中采用的“图像采集-图像处理”交叉结构的数据处理速度比传统的“图像采集-图像处理”顺序结构的处理速度高15.5%。
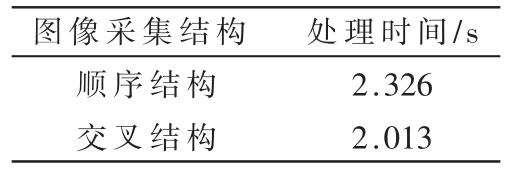
表1 图像采集效果对比
综上所述,采用“图像采集-图像处理”交叉结构,能够提高对图像处理单元的空闲时间利用率,且图像处理单元利用空闲时间对图像单元块进行图像处理,减少了图像处理单元在单位时间内的负荷,提高数据处理效率,在一定程度上解决了下游控制单元数据处理滞后的问题,从而能够保障智能车路径识别的实时性,提高智能车的运行速度和灵活性。
除了在路径识别处理的执行结构上的优化,本研究在图像处理的算法上也进行了优化。采用跟踪边缘检测算法,较传统边缘检测算法[9],不会对图像单元中每个像素点进行比较运算,从而无需对采集到的整幅图像中所有的像素点进行处理,因此,占用系统资源少,还可以排除外界噪声干扰,进而可以提高图像处理单元的数据处理效率,并能够为智能车提供准确、可靠的行驶路径。图1所示为图像处理中边缘跟踪检测算法流程图。
为了验证在图像处理算法上的优势,分别采用跟踪边缘检测算法和传统边缘检测算法对同一幅图像进行图像处理。如图2所示,图2(a)为源图像,图2(b)为采用传统边缘检测算法的处理结果,图 2(c)为跟踪边缘检测算法的处理结果。
可以看出,跟踪边缘检测算法能够有效排除外界噪声的干扰,最终提供给智能车准确的行驶路径。
除此之外,较传统边缘检测算法,本研究采用的跟踪边缘检测算法还具有较高的数据处理速度。表2对两种算法的数据处理时间进行了比较。
从表2中可以看出,跟踪边缘检测算法的数据处理速度是传统的边缘检测算法的2.34倍,保证了智能车中数据处理的高效性和实时性。
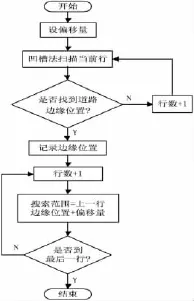
图1 边缘跟踪检测算法流程图

图2 图像处理效果图
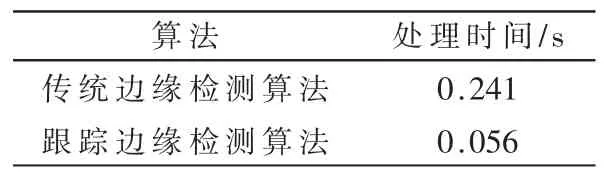
表2 两种算法处理时间比较
2 模糊自适应PID控制器设计
在控制系统中,将模糊控制算法和传统的PID算法相结合,以提高智能车控制系统的自适应性和鲁棒性。模糊自适应PID控制器以误差 e(实际测量值与设定值之差)和误差变化率ec作为输入参数,利用模糊控制规则对 PID控制器的 3个参数(Kp、Ki和 Kd)进行调整,并将该三个参数值作为输出,以选取适合智能车当前运行状态最佳参数值。图3所示为智能车控制系统结构示意图。
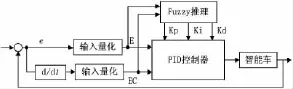
图3 模糊自适应PID控制结构图
模糊自适应PID控制器输入变量e的语言变量为E,ec的语言变量为EC,两者的论域都为{-3,-2,-1,0,1,2,3},相应的语言值为{NB,NM,NS,ZO,PS,PM,PB};输出参数Kp、Ki和Kd的语言变量分别为KP、KI和KD,论域都为{0,1,2,3},相应的语言值为{ZO,PS,PM,PB}。输入参数与输出参数的隶属度函数均采用三角函数,图4所示为基于上述参数值的隶属函数图。

图4 输入和输出的隶属度函数图
模糊自适应PID控制器以控制规则作为模糊推理的依据[10]。PID参数值的选取必须考虑在不同情况下三个参数的作用以及相互关系。按以上原理并根据智能车的运行特性和控制经验建立输入为E、EC,以及输出为KP、KI和KD的多输入多输出的模糊规则,并在MATLAB中进行仿真,得到如图5所示的控制规则曲面图。
通过MATLAB提供的Simulink对模糊自适应PID控制器的设计进行仿真,并将其处理结果与传统PID的处理结果进行比较,其比较结果如图6和表3所示。可以看出,模糊自适应 PID控制器具有超调量小、响应时间短的优点。
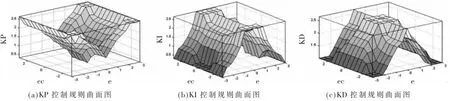
图5 KP、KI和KD控制规则曲面图

表3 比较结果
3 整体实验对比及分析
为了验证最终效果,在相同路径下,分别采用传统方法和本研究的方法对智能车的性能进行了测试,经过20次对比实验,得到智能车跑完全程的时间、平均速度及准确率,如表4所示。
从表4可以看出,应用本文所取得的方法,能够有效加快智能车响应速度,提高准确率,对智能车的整体性能的提升有显著的作用,且在实际运行中能使智能车转向相对比较连续,不出现突变现象,运行轨迹相对平滑、稳定。
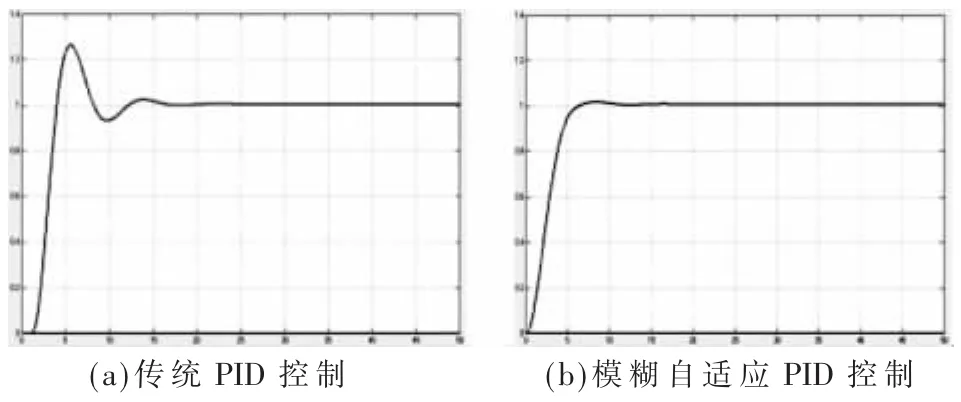
图6 仿真结果比较

表4 测试效果对比
同时可见,车速受硬件响应速度、图像算法处理速度、车体结构、测试环境等因素的整体非线性叠加影响,而非简单的线性比例关系。
4 结束语
本研究采用“图像采集—图像处理”交叉执行的方式提高了智能车的数据处理速度,且在图像处理阶段采用跟踪边缘检测算法,较传统边缘检测算法,既具有对外界声进行滤除的作用,又能够将图像处理时间提高2.34倍,从而在保障智能车路径识别准确性的同时还保障智能车数据处理的高效性和实时性。
而在智能车控制系统方面,将模糊控制算法和传统的 PID算法相结合,较传统的 PID算法,其超调量减少了近12倍,且收敛时间也相对减少,同时响应速度也提高了近5倍。
最后对整体性能进行了实际验证比较,结果表明本研究取得的方法最终使智能车速度提高了33.3%,准确率提高了35.7%。因此,采用本研究方法,能够有效使智能车具有较好的灵活性、较高的自适应性和鲁棒性。
[1]王国胤,陈乔松,王进.智能车技术探讨[J].计算机科学,2012(5):1-8.
[2]Md.NazmulHasan,S.M Didar-Al-Alam,Sikder Rezwanul Huq.Intelligent car control for a smart car[J].InternationalJournal of Computer Applications,2011,143:15-19.
[3]HUANG Z Q.Design of smart car section PID control algorithm based on CCD camera[J].Electronic Design Engineering,2011,19(2).
[4]吴斌华,黄卫华,程磊,等.基于路径识别的智能车系统设计[J].电子技术应用,2007(3):80-82.
[5]FRAICHARD T,GARNIER P.Fuzzy control to drive car-like vehicles[J].Robotics&Autonomous Systems,2001,34(1):1-22.
[6]王威,杨平.智能PID控制方法的研究现状及应用展望[J].自动化仪表,2008(10):1-3.
[7]MARTINS F G,COELHO M A N.Application of feedforward artificial neural networks to improve process control of PID-based control algorithms[J].Computers&Chemical Engineering,2000,24:853-858.
[8]李旭东,廖中浩,孟娇.基于 CMOS摄像头的智能车控制系统设计及实现[J].吉林大学学报(信息科学版),2013(4):414-418.
[9]魏玉虎,石琛宇,姜建钊,等.基于视觉的智能车转向控制策略[J].电子技术应用,2009(1):130-134.
[10]金晓明,荣冈,王骥程.模糊控制理论及其应用评述[J].化工自动化及仪表,1995(2):3-8.
Research and implementation on path recognition and control performance improvement methods of smart car
Liu Tao,Lv Yong,Liu Lishuang
(School of Instrument Science and Optoelectronic Engineering,Beijing Information Science&Technology University,Beijing 100192,China)
In order to enhance the accuracy,real-time and robustness of the smart car,we use“Image acquisition-Image processing”method while manipulate images by tracking edge detection algorithm,and we combine the fuzzy control algorithm and PID algorithm.The experimental results show that the speed is increased by 33.3%and the accuracy is increased by 35.7%.In this study,the intelligent car system can be widely used in modern automotive driver assistance systems,and improve security in intelligent traffic.
smart car;image acquisition;image processing;track recognition;fuzzy control
TP391.8
A
10.16157/j.issn.0258-7998.2016.01.014
2015-10-23)
刘涛(1988-),男,硕士研究生,主要研究方向:光电应用技术。
吕勇(1971-),男,博士,教授,主要研究方向:光电检测、精密测试。
中文引用格式:刘涛,吕勇,刘立双.智能车路径识别与控制性能提高方法研究及实现[J].电子技术应用,2016,42(1):54-57.
英文引用格式:Liu Tao,Lv Yong,Liu Lishuang.Research and implementation on path recognition and control performance improvement methods of smart car[J].Application of Electronic Technique,2016,42(1):54-57.
