纱线张力控制器的设计
2016-11-30景军锋苏泽斌
张 楠,景军锋,苏泽斌
(西安工程大学 电子信息学院,陕西 西安 710048)
纱线张力控制器的设计
张 楠,景军锋,苏泽斌
(西安工程大学 电子信息学院,陕西 西安 710048)
针对纺织过程中纱线张力波动问题,设计一种纱线张力控制器,并介绍其软硬件设计方案.该控制器在STM32硬件平台基础上,基于BP神经网络的自适应PID技术控制电机的加减速,恒定纱线的实时张力.仿真结果表明,基于BP神经网络PID控制效果优于常规PID,具有响应速度快、超调量小、鲁棒性强等优点.
纱线张力;BP神经网络;PID;STM32
0 引 言
纺织行业一直在国民经济中占有重要地位,尤其在改革开放以来,纺织业飞速发展.提高纺织品质量和产量的一个重要措施就是提高纱线的成型质量,而纱线张力是影响纱线成型质量的关键参数.当张力过小时,纱线卷绕过程中容易产生脱圈、纱筒容量小等问题;当张力过大时,容易导致纱线分子结构改变,影响后续的染色,甚至会出现断纱现象.所以,在实际纱线络筒卷绕过程中,当纱线张力波动过大,则需要恒定张力,使其接近预设值.随着经济条件的改善,消费者对织物的质量要求越来越高,促使厂商在生产的过程中对纱线张力的要求也变得越来越高.因此,张力的有效控制直接与生产效率息息相关[1].
文献[2]介绍了一种纱线张力控制方案,该方案采用主动退绕式张力产生结构,运用模糊 PID 控制算法,实现纱线张力的恒定;文献[3]提出一套新的系统结构,增加PC端监控程序,使用带死区的PID控制算法实现纱线张力的恒定.但是该设备安装相对复杂,成本较高,张力恒定时间过长,降低纱线的生产率.
目前,国际市场上普遍受欢迎的纱线张力控制设备主要有有日本村田公司、德国赐来福公司、意大利 BTSR 等厂家生产的纱线检测控制一体化设备[4].以意大利BTSR为例,该公司推出一款Winding Feeder纱线控制系统,该系统以一套创新性理念将纱线装置和恒张力控制结合在一起.系统的本质利用纱线与导纱轮之间的摩擦力调节纱线张力,但是长时间的摩擦会导致纱线产生毛羽,甚至发热断裂,从而降低了纱线的品质[5-6].国内从事生产纱线张力控制系统的厂家相对较少,具有代表性的有青岛宏大纺织机械有限责任公司,该公司生产的一款名为SMARO的自动络筒机,采用电磁加压的方式控制张力的波动,同时还增加一个气圈破裂器,从一定程度上减少气圈对纱线张力的影响.相比国内产品,国外产品的设备售价普遍较高,这大大增加国内的中小纱线生产厂商的成本[7].
因此,本文提出一种以基于BP神经网络的自适应PID技术控制电机的短时加减速过程来实现张力调节的控制器,不仅结构简单,同时也降低硬件成本.通过软件设置,一套控制设备可以控制检测多路的纱线张力,对应的端口输出驱动多个电机,不论在自动络筒机、加弹机还是输纱器中,都可以用来恒定纱线的实时张力,生产高质量的纱线.
1 工作原理及硬件结构设计
1.1 工作原理
纱线在运行过程中,张力会不断地波动,有时会产生峰值,超出纱线制作工艺可接受的张力波动范围.同时,纱线张力传感器不断采集当前的张力值,通过LCD显示器显示出实时张力数据.当张力值过大或过小时,系统会改变PWM的占空比,调整电机的加减速,直到张力达到一个恒定范围的张力状态.如果发生断纱现象,电机立刻停止运行.系统工作原理如图1所示.
1.2 张力传感器
目前各种纱线张力测试方法基本原理类似,如图2所示.

图 1 工作原理图 图 2 传感器原理示意图Fig.1 Principle diagram Fig.2 Sensor principle diagram
将张力变化信号传输至敏感原件,转换原件将其转换为检测装置所能接收识别的电子信号,对其进行后续处理[8].目前市场上常用的张力传感器中接触式的居多,其中应用最广的是三辊式电阻应变电桥的测试方法[9-10].三辊式纱线张力传感器的中间辊是传感器所在的测量辊,两端是普通的辅助辊,待测纱线绕于其上.电阻式张力传感器的特点适用于测试位移变化较小的工作场合,具有环境适应性强、精度高、价格低廉等优点.因此,这种张力传感器被普遍用于各个纺织环节中的纱线张力检测[11].

图 3 硬件结构框图Fig.3 Hardware structure diagram
1.3 硬件结构
纱线张力控制器的硬件结构主要包括张力传感器、变送器、AD转换模块、LED报警、LCD显示模块等,硬件结构框图如图3所示.(1)控制器产生的PWM波经前级隔离放大驱动伺服电机的运行;(2)按键初始标定设置张力的设定值与零值;(3)12位的AD转换模块,可以实现对张力传感器模拟信号的数字转换;(4)LCD实时显示当前的张力值和速度值;(5)处理器采用ST公司32位ARM Cortex-M3内核微处理器,时钟频率达72MHz,内部集成PWM控制器以及常用的SSI、I2C、UART通信接口[12];(6)LED报警电路的设计采用晶体管放大电路,控制器I/O口通过改变输入输出状态进行报警; (7)市场上大部分张力传感器的输出是4~20mA的国际标准电流,因此,使用变送器将其转换为0~3.3V的电压,以便控制器的处理.

图 4 系统软件流程图Fig.4 System software diagram
1.4 软件设计
系统的软件设计方案包括以下内容:(1)硬件初始化,对系统需要的功能模块进行配置[13];(2)进入系统主时序控制,输出初始PWM以驱动电机;(3)张力传感器输出的同时,启动ADC采样;(4)对每50个AD值保存并求取其平均值,以此类推,新的一组值将代替旧值不断进行处理;(5)每隔500ms实现一次张力均值的显示,同时显示当前电机转速;(6)通过与设定值的比较判断当前纱线的张力,如果波动值变大或者变小且超过可接受时间,系统将重新改变当前PWM占空比,对电机进行调速,直到纱线张力回归到可接受范围;(7)如果出现断纱现象,PWM占空比变为0,此时停止电机运转并进行灯光报警.软件流程图如图4所示.
2 电机控制方案
选用基于BP神经网络的自适应PID算法来控制电机的加减速运转.该算法具有逼近任意非线性函数的能力,并且算法结构相对简单明确.利用BP神经网络自身的学习训练,找到最适合的PID控制参数[14].
基于BP神经网络的PID控制结构如图5所示.控制器由以下2部分组成:(1)经典的PID控制器;(2)BP神经网络:根据系统实时运行状态,通过网络自身的学习训练,输出对应于PID的比例(kp)、积分(ki)、微分(kd)参数.神经网络通过自身调整加权系数,从而使其稳定运行于某种最优控制下的PID的控制器参数[15].经典的数字PID的算式为
u(k)=u(k-1)+kp(e(k)-e(k-1))+ki(k)+kd(e(k)-2e(k-1)+e(k-2)).
(1)
同时可将式(1)表达为
u(k)=f[u(k-1),kp,ki,kd,e(k),e(k-1),e(k-2)].
(2)
其中:u(k-1)为k-1时刻的输出;e(k)为误差输入.通过BP神经网络的训练和学习找到这样一个最佳参数组合来优化系统.
设BP神经网络采用3层BP结构,其结构如图6所示.它有4个输入节点,5个隐含节点,3个输出节点.不同的系统复杂度,对应的输入变量的个数也不同[16].输出节点分别对应PID控制器的3个参数比例(kp)、积分(ki)、微分(kd).并且由于该参数不能为负,所以输出层神经元活化函数取非负的Sigmoid函数[17].

图 5 BP-PID控制结构 图 6 BP神经网络结构图Fig.5 BP-PID control structure Fig.6 The BP neural network structure
图6中神经网络的输入、输出设为

(3)
其中,将网络的输入变量作为控制器的输入,即
(4)
网络隐含层的输入、输出为
(5)
网络输出层的输入、输出为
(6)
取性能指标函数为

(7)
按照梯度下降法修正网络的加权系数[18],即按E(k)对加权系数的负梯度方向搜索调整,并附加一个使搜索快速收敛全局极小的惯性项,则有

(8)
其中:η为学习率;α为惯性系数.由以式(8)得,BP神经网络输出层的加权系数学习算法为
(9)
网络隐含层的加权系数学习算法为
(10)
综上所述,基于BP网络的PID控制器控制算法实现步骤如下:(1) 选取合适的网络结构,确定各层加权系数的初始值,学习率η以及惯性系数γ[18];(2) 获取张力初始时刻的输入输出值,计算此时误差;(3) 对各项输入进行归一化处理.(4) PID控制器输出u(k);(5) 在线调整加权系数,实现PID控制参数的自适应调整.
3 仿真实验结果
通过Matlab软件对常规PID和基于BP神经网络PID进行仿真实验.输入为阶跃函数,输出为其达到稳定状态的变化值.当输出为1时,表示系统达到稳定状态.仿真曲线如图7,8所示.
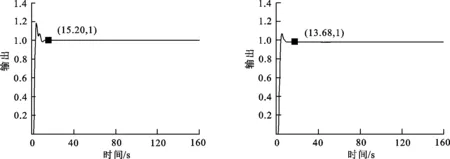
(a) 常规PID (b) BP神经网络PID图 7 仿真曲线Fig.7 The simulation curve

图 8 BP神经网络PID参数整定Fig.8 BP neural network tuning PID parameters
从图7可以看出,基于BP神经网络 PID 控制比常规PID控制的调节时间缩短了约10%,超调量也较小,暂态过程中只有一次震荡.通过图8可以看出,基于BP神经网络PID控制器的参数整定在15.2s之前完成.
4 结束语
提出一种纱线恒张力控制器的设计方案,该设计方案的安装与控制过程相对便捷.通过控制电机的加减速来恒定纱线的实时张力,避免纱线与设备之间的摩擦,提高了纱线的质量.同时,选用基于BP神经网络的自适应PID算法来控制纱线张力的波动规律.该方法可以在线自整定控制参数,响应速度快,鲁棒性较强,具有很好的环境适应性.
[1] 熊秋元,高晓平.纱线张力检测与控制技术的研究现状与展望[J].棉纺织技术,2011,39(6):65-68.
XIONG Qiuyuan,GAO Xiaoping.Current situation and outlook of yarn tension measurement and control technology[J].Cotton Textile Technology,2011,39(6):65-68.
[2] 韩帅,狄士春,杨俊杰.嵌入式纱线张力控制系统设计[J].机械设计与制造,2015(8):140-142.
HAN Shuai,DI Shichun,YANG Junjie.Design of embedded yarn tension control system [J].Machinery Design & Manufacture,2015(8):140-142.
[3] 黄健.纱线张力控制系统的设计与实现[D].杭州:杭州电子科技大学,2014:10-11.
HUANG Jian.Design and realize of the control system for yarn tension[D].Hangzhou:Hangzhou University of Electronics & Science,2014:10-11.
[4] VASCONCELOS F B D,MARCICANO J P P,SANCHES R A.Influence of yarn tension variations before the positive feed on the characteristics of knitted fabrics[J].Textile Research Journal,2015,85(17):1864-1871.
[5] 李丽君,崔鸿钧.Auto coner338自动络筒机均匀纱线张力的措施[J].现代纺织技术,2001,9(3):18-20.
LI Lijun,CUI Hongjun.Measures to make the yarn tension uniform on auto coner 338 winder[J].Advanced Textile Technology,2001,9(3):18-20.
[6] 张水英,马也驰.Autoconer 5自动络筒机中的现代电子技术[J].现代电子技术,2014,37(22):108-110.
ZHANG Shuiying,MA Yechi.Modern electronic technology used in Autoconer 5 automatic winders[J].Modern Electronics Technique,2014,37(22):108-110.
[7] 刘行,缪旭红,赵帅权.纱线张力测试方法研究进展[J].棉纺织技术,2015,43(1):78-82.
LIU Xing,MIAO Xuhong,ZHAO Shuaiquan.Research progress of yarn tension test method[J].Cotton Textile Technology,2015,43(1):78-82.
[8] 陈振,梅顺齐,李臻.基于MATLAB图像处理技术的纱线气圈张力测量方法研究[J].纺织科技进展,2015(3):18-21.
CHEN Zhen,MEI Shunqi,LI Zhen.Research on the measurement method of the yarn balloon tension based on MATLAB image processing technology[J].Progress in Textile Science & Technology,2015(3):18-21.
[9] 王光武,林富生,彭蒙.一种多层织机经纱张力补偿装置的设计[J].机电产品开发与创新,2014,27(6):38-39.
WANG Guangwu,LIN Fusheng,PENG Meng.Design of a multilayer warp tension compensation device[J].Development & Innovation of Machinery & Electrical Products,2014,27(6):38-39.
[10] 苏中华,于翔,高正源,等.电子玻纤拉丝张力及毛羽影响因素[J].玻璃钢/复合材料,2014(3):58-60.
SU Zhonghua,YU Xiang,GAO Zhengyuan,et al.Drawing rension and filoplume influencing factor of e-glass fiber[J].Fiber Reinforced Plastics/Composites,2014(3):58-60.
[11] 付天亮,韦云松,王昭东,等.铝带气垫式热处理线张力控制系统研究[J].铝加工,2015(2):4-10.
FU Tianliang,WEI Yunsong,WANG Zhaodong,et al.Research on tension control system for aluminum strip air-cushion heat treatment line[J].Aluminium Fabrication,2015(2):4-10.
[12] 刘洁,魏金成,伍林.基于模糊神经网络PID的线切割张力控制系统的分析[J].制造业自动化,2015,37(1):71-73.
LIU Jie,WEI Jincheng,WU Lin.Analysis of tension control system for cutting based on the fuzzy neural network with PID[J].Manufacturing Automation,2015,37(1):71-73.
[13] 林君焕,陈月芬,金建华.多线切割机恒张力控制系统研究[J].系统仿真技术,2015,11(3):224-230.
LIN Junhuan,CHEN Yuefen,JIN Jianhua.Research on constant tension control system for multi-wire saw[J].System Simulation Technology,2015,11(3):224-230.
[14] 杨艺,虎恩典.基于S函数的BP神经网络PID控制器及Simulink仿真[J].电子设计工程,2014,22(4):29-31.
YANG Yi,HU Endian.Simulink simulation of BP neural network PID controller based on S-function[J].Electronic Design Engineering,2014,22(4):29-31.
[15] 蒋鼎国.基于改进型BP神经网络PID控制器的温室温度控制技术[J].实验室研究与探索,2015,34(1):9-13.
JIANG Dingguo.The temperature control of greenhouse based on novel PID controller[J].Research and Exploration in Laboratory,2015,34(1):9-13.
[16] 段艳明.基于PSO算法和BP神经网络的PID控制研究[J].计算机技术与发展,2014,24(8):238-241.
DUAN Yanming.Research of PID control based on BP neural network and PSO algorithm[J].Computer Technology and Development,2014,24(8):238-241.
[17] 刘晓冬,张海,庞福.基于BP神经网络的矿井提升机自适应PID控制器研究[J].煤矿机械,2014,35(7):171-173.
LIU Xiaodong,ZHANG Hai,PANG Fu.Adaptive PID controller research of mine hoist based on BP neural network[J].Coal Mine Machinery,2014,35(7):171-173.
[18] 张文兴.基于BP神经网络的模糊PID控制器的设计[J].电子世界,2014(15):131,134.
ZHANG Wenxing.Design of fuzzy PID controller based on BP neural network[J].Electronics World,2014(15):131,134.
编辑、校对:孟 超
Design of yarn tension controller
ZHANG Nan, JING Junfeng,SU Zebin
(School of Electronics and Information, Xi′an Polytechnic University, Xi′an 710048, China)
In view of the problem of the yarn tension fluctuation in textile process,a yarn tension controller is designed,and the controller hardware and software design scheme is introduced.The adaptive PID technology based on BP neural network is applied to control the constant yarn tension of the acceleration and deceleration of the motor based on the hardware platform of STM32.The simulation results show that the BP neural network PID control effect is better than conventional PID,and it has fast response, less overshoot and robustness etc.
yarn tension; BP neural network; PID; STM32
1674-649X(2016)04-0446-06
10.13338/j.issn.1674-649x.2016.007
2016-03-10
国家自然科学基金资助项目(61301276);陕西省教育厅产业化培育资助项目(2011JG18);西安工程大学学科建设经费资助项目(107090811)
景军锋(1978—),男,陕西省澄城县人,西安工程大学副教授,博士,研究方向为工业检测、图像处理与模式识别等.E-mail:jingjunfeng0718@sina.com
张楠,景军锋,苏泽斌.纱线张力控制器的设计[J].西安工程大学学报,2016,30(4):446-451.
ZHANGNan,JINGJunfeng,SUZebin.Designofyarntensioncontroller[J].JournalofXi′anPolytechnicUniversity,2016,30(4):446-451.
TS
A