3RPS/UPS结构并联机器人设计与分析
2016-11-30梁桥康吴贵元邹坤霖王耀南孙炜赵
梁桥康+吴贵元+邹坤霖+王耀南+孙炜+赵全育


摘 要:为了满足踝关节康复训练对自由度、工作空间和刚度等性能的要求,本文设计了一种新型的三自由度高刚性3RPS/UPS结构并联机器人.此结构在传统的3RPS结构基础上加入了一条UPS结构的冗余驱动支链,在保证满足自由度要求的同时,又增强了结构的刚度性能,减少了操作平台的晃动和形变,提高了操作精度.通过对此结构进行逆运动学分析、工作空间分析和刚度分析,验证了3RPS/UPS结构可以应用于踝关节康复训练这类具有高负载、操作灵敏等特点的操作任务.最后对该3RPS/UPS结构并联机器人进行了运动学控制仿真,仿真结果表明系统具有较高的动态轨迹跟踪控制精度,适用于实际应用.
关键词:刚度;并联机器人;逆运动学;3RPS;工作空间;运动学控制
中图分类号:TP242.3 文献标识码:A
文章编号:1674-2974(2016)10-0110-09
Abstract:To meet the demand of ankle rehabilitation training in degree of freedom (DOF), workspace and stiffness, this paper proposed a three-DOF parallel mechanism with a novel 3RPS/UPS structure. By adding a redundant driving chain with UPS structure under the foundation of the conventional 3RPS mechanism, the proposed structure can meet the demand of DOF and enhance the stiffness simultaneously. Consequently, the shaking and deformation of the operating platform is decreased, and the operation accuracy is improved as well. In this paper, we conducted a systematic analysis on the aspect of inverse kinematics, workspace and stiffness, and then demonstrated the feasibility of the proposed 3RPS/UPS structure to ankle rehabilitation training with the characteristics of heavy-load, microoperation and so on. To verify the applicability in practical operation of the proposed 3RPS/UPS structure, we conducted kinematics control simulation and obtained a high accuracy in dynamic trajectory tracking.
Key words:stiffness; parallel mechanism; inverse kinematic; 3RPS; workspace; kinematics control
由于并联机器人具有运动学逆解简单、刚度高、关节累计误差小和运动精度高等优点,使其在康复机器人领域中得到了广泛应用.目前国内外已经开展了关于踝关节康复训练并联机器人的系统性研究,用于帮助踝关节扭伤者和患有足下垂、足内翻、足外旋的患者进行踝关节的康复训练.踝关节的运动可以分解为绕3个垂直轴的转动.Girone等[1]基于Stewart平台进行了踝关节康复机器人原型机设计和踝关节康复临床试验,此结构并联机器人具有6自由度,满足踝关节的运动自由度要求,取得了很好的实验结果.但是,由于Stewart平台具有结构复杂、控制环节过多等缺点,越来越多的学者开展了少自由度踝关节康复机器人的研究.Blanco-Ortega等[2]提出了一种具有两个自由度的康复机构,可以模拟踝关节的两个转动.由于踝关节康复训练机器人需要承载患者一部分身体的重量,而此负载会对动平台造成螺旋变形,影响动平台的位姿控制精度,所以要求用于踝关节康复训练的并联机器人应当具备高刚度特性.国内外很多学者都提出了增加中间支链的并联机器人,并利用其高刚度特点实现踝关节康复训练等机器人的设计.赵铁石等[3]对基于3RSS/S的并联结构进行了工作空间和运动性能分析,并验证了该结构能够模拟踝关节的3种转动.本文结合踝关节康复训练机器人对自由度和高刚度的要求,综合考虑基于3RPS少自由度并联机器人构件少、工作空间大、控制简单的优点,通过增加冗余驱动支链进一步提高其刚度性能和减小其运动耦合性.本文设计了一种3RPS/UPS结构4驱动3自由度冗余驱动并联构型,用于踝关节康复训练,此结构具有刚度高的优点,可以实现模拟踝关节的转动活动.
首先对3RPS/UPS结构进行逆运动学分析,为系统的性能分析和运动学控制做好准备.其次,对3RPS/UPS结构的工作空间进行了仿真,验证了该结构可以用于踝关节康复训练,为刚度仿真和运动学控制提供了参考依据.分别基于螺旋理论和影响系数法求解3RPS结构和UPS结构的全雅克比矩阵,进而建立了刚度性能模型,并通过实例验证3RPS/UPS结构的高刚度特性,为并联结构投入实际应用提供重要的参考依据.最后进行PID运动学控制仿真,仿真结果进一步验证了该结构可以满足实际应用与操作的需求.
1 并联结构构型
设计的并联结构如图1所示,该结构由动平台、静平台、连接动静平台端点的3RPS支链和连接动静平台中心点的UPS支链构成,其中,3RPS/UPS4条支链中都是以P铰链作为驱动铰链,其余铰链为被动铰链.
静平台由外接圆半径为R的等边三角形刚体A1A2 A3构成,动平台则由外接圆半径为r的等边三角形B1B2B3刚体构成.静平台坐标系{O-xAyAzA}原点位于平台中心点O处,zA轴垂直于静平台方向朝上,xA轴过A1点 ;动平台坐标系{P-xByBzB}原点位于平台中心点P处,zB轴垂直于动平台方向朝上,xB轴过B1点.3RPS支链下端点A1,A2,A3通过R铰连接静平台,R铰的轴ui分别垂直于OAi(i=1,2,3),其上端点B1,B2,B3通过S铰与动平台连接,每条支链中部有一个P铰(主动关节)可以在驱动作用下做伸缩运动;UPS支链的下端点位于静平台坐标系原点O处,上端点位于动平台坐标系的原点P处,支链有3个铰链,从下到上依次为U铰、P铰和S铰,其中P铰是驱动铰链,U铰和S铰是被动铰链.
3RPS结构中3条能自由伸缩的RPS支链结构使动平台具有3个自由度[4],其分别为Z方向的平动和X,Y轴方向的转动;中间冗余驱动支链UPS具有6个自由度,并不对平台的自由度造成影响;所以结构3RPS/UPS动平台的自由度由3RPS结构决定,为3自由度平台.
2 结构逆运动学分析
结构的逆运动学位置逆解问题指已知动平台执行器部分的相应位置和姿态矢量,求解关节的位置和姿态矢量.逆运动学分析是进行工作空间仿真、刚度分析和控制的前提和基础.
2.1 3RPS结构逆运动学分析
设动平台的姿态为(α,β,γ),表示动坐标系关于静坐标系连续旋转角度,变换的顺序依次为绕zB轴旋转γ角度、绕yB轴旋转β角度、绕xB轴旋转α角度,因此,动坐标系到静坐标系转换的旋转矩阵可以通过式(1)计算[4].
4 静刚度分析
当外力作用于动平台时,平台会产生螺旋变形.踝关节康复训练机器人需要承受患者身体一部分的重力作用, 3RPS/UPS结构用于踝关节康复训练时,当动平台上受到外界重力作用后,3RPS和UPS都会给动平台提供支撑力,从而减小动平台的螺旋变形量.本文分别对3RPS和UPS两部分结构进行了刚度分析,基于雅克比矩阵得出刚度系数矩阵,并利用Matlab仿真分析不同位姿下的静刚度分布情况.
4.1 3RPS结构力雅克比矩阵分析
在不考虑UPS冗余驱动支链的驱动力和约束力以及重力的情况下,动平台的受力情况如图5所示.
5 运动学控制仿真
由于并联机器人的逆运动学运算简单,而正运动学运算比较复杂,所以本文选用基于关节空间的闭环控制结构,进行运动学控制实验.控制原理是把对笛卡尔空间的位姿控制转换为对关节空间的位置控制,即把动平台位姿(α,β,zP)的期望通过逆运动学运算转换为对4个驱动铰链P位移的期望,等价于求取4条驱动杆长度的期望,于是可以通过对驱动杆长度进行直接闭环控制,实现动平台位姿的间接控制,该控制系统的原理图见图8.3RPS结构的3条驱动杆长度求解见式(8),由图1可知,UPS冗余驱动支链驱动杆的长度为
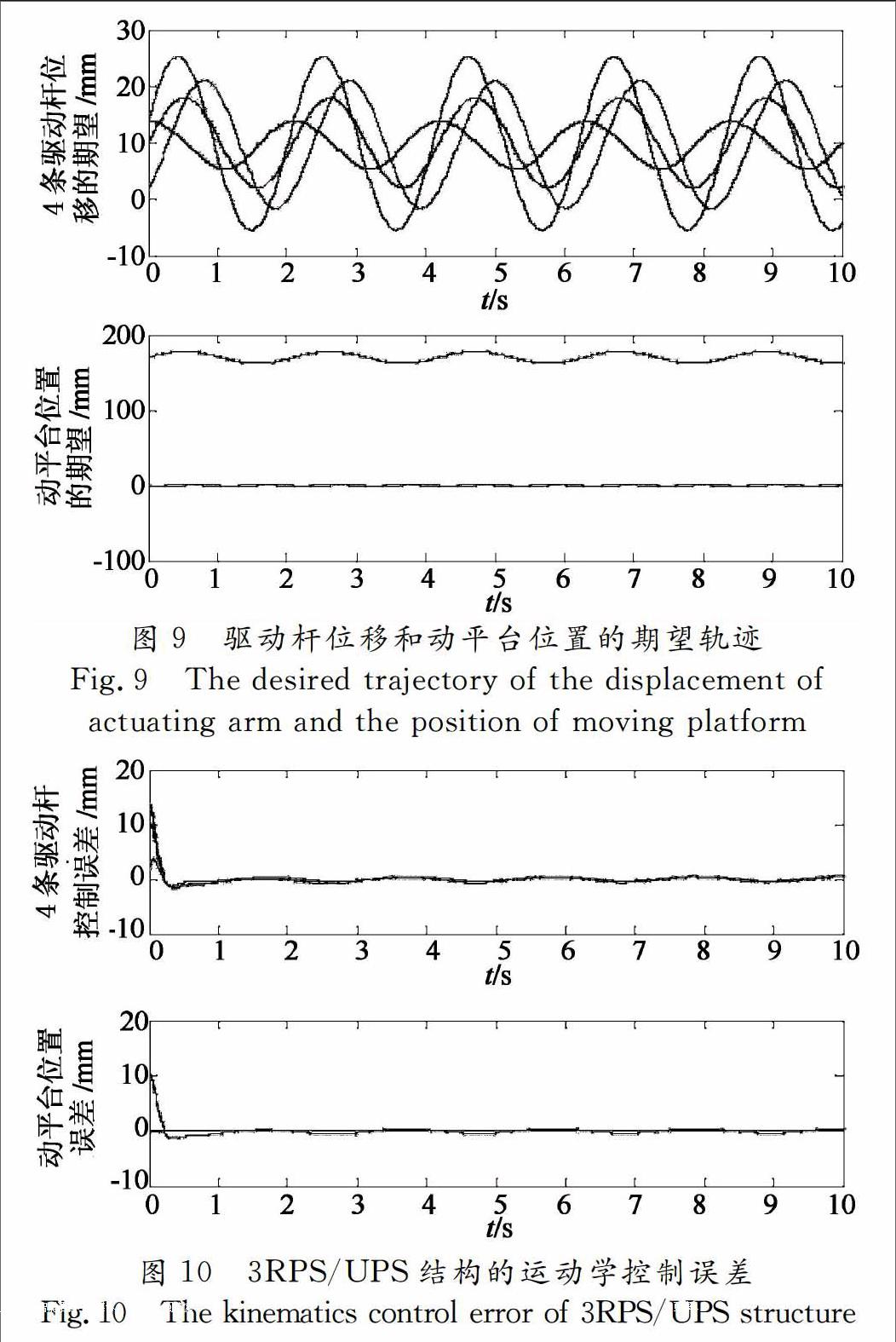
本文采用Simulink进行仿真实验,其中,控制器采用PID控制器,利用SimMechanics模块建立结构模型,逆运动学运算采用S函数编写m文件实现.动平台中心点的运动轨迹见表3,通过逆运动学运算,得到动平台位置和驱动杆位移的期望轨迹如图9所示.通过PID运动学控制,控制误差如图10所示,从图中可以看出,3RPS/UPS并联结构能够快速响应,结构稳定运行时,杆长的动态控制精度较高,最大动态误差为2%,通过对驱动杆长的直接闭环控制,动平台的位置可以得到间接控制,其最大动态误差为5%.动平台位置控制误差大的原因是控制算法忽略了非线性关系与关节协调耦合.因此,课题组下阶段的研究将集中在3RPS/UPS并联机器人的控制策略,以提高系统的控制精度.
6 结 论
1) 通过3RPS/UPS并联结构工作空间仿真可以得出(α,β,γ)的转动空间范围大,(xP,yP,zP)的移动空间范围较小,转动空间满足踝关节康复训练3个转动范围的要求.
2) 3RPS/UPS并联结构的整体静刚度由3RPS结构的刚度与UPS冗余驱动支链的刚度两个部分组成,在UPS被动支链的作用下,3RPS/UPS结构的刚度比3RPS结构的刚度在各方向上均有较大的提高.
3) 3RPS/UPS并联结构的刚度映射分量值在3个方向上较大,在另外3个方向上较小,即结构线位移(xP,yP,zP)刚度远远高于角位移(α,β,γ)刚度.活动范围是刚度的导数,即(xP,yP,zP)活动范围小,(α,β,γ)活动范围大.
4) 本文进行的刚度分析对结构的最佳刚度工作区域的选择、精度的提高、结构设计的改进等有重要意义.
5) 本文通过PID运动控制仿真,验证了3RPS/UPS并联结构可以应用于实时控制.但是,该控制算法忽略了非线性关系与关节协调耦合,使动平台位置动态控制误差较大.因此,课题组下一步将针对3RPS/UPS并联机器人控制策略展开研究,以进一步提高系统的动态控制精度.
参考文献
[1] GIRONE M, BURDEA G, BOUZIT M, et al.Stewart platform-based system for ankle telerehabilitation [J]. Autonomous Robots, 2001,10(2): 203-212.
[2] BLANCO-ORTEGA A, GOMEZ-BECERRA F A ,VALDES L G V. A generalized proportional integral controller for an ankle rehabilitation machine based on an XY table [C]//Proceedings of the Mechatronics, Electronics and Automotive Engineering (ICMEAE), 2013 International Conference. Cuernaraca: Morelos, Mexico:Computer Society Press,2013:152-157.
[3] 赵铁石, 于海波, 戴建生. 一种基于3-RSS/S并联机构的踝关节康复机器人[J]. 燕山大学学报, 2005,29(6):471-475.
ZHAO Tie-shi, YU Hai-bo, DAI Jian-sheng. An ankle rehabilitation device based on 3-RSS/S parallel mechanism [J]. Journal of Yanshan University, 2005,29(6): 471-475. (In Chinese)
[4] NALLURI M R , RAO0 K M.. Dimensional synthesis of a spatial 3-RPS parallel manipulator for a prescribed range of motion of spherical joints [J]. Mechanism and Machine Theory,2009, 44(2): 477-486.
[5] LIANG Qiao-kang , ZHANG Dan, SONG Quan-jun,et al. Design and evaluation of a novel flexible bio-robotic foot/ankle based on parallel kinematic mechanism [C]// Proceedings of the Mechatronics and Automation (ICMA), 2010 International Conference.Xi'an, China:IEEE:Conference Publications, 2010:1548-1552.
[6] LIANG Qiao-kang, ZHANG Dan, CHI Zhong-zhe, et al .Six-DOF micro-manipulator based on compliant parallel mechanism with integrated force sensor [J]. Robotics and Computer-Integrated Manufacturing, 2011,27(1): 124-134.
[7] 段艳宾,梁顺攀,曾达幸,等. 6-PUS/UPU并联机器人运动学及工作空间分析[J]. 机械设计,2011,28(3):36-40.
DUAN Yan-bin, LIANG Shun-pan, ZENG Da-xing, et al. Kinematics and workspace analysis of 6-PUS/UPU parallel manipulator [J]. Journal of Machine Design, 2011,28(3): 36-40. (In Chinese)
[8] 邬昌峰. 6-SPS并联机器人工作空间研究及其优化设计[D]. 合肥:合肥工业大学机械制造及其自动化系, 2003.
WU Chang-feng. Research of the wrkspace of 6-SPS prallel rbot And is otimization dsign [D]. Hefei: Department of Machanical Manufactering and Automation, Hefi University of Technology, 2003. (In Chinese)
[9] 郭江真,王丹,樊锐,等. 3PRS/UPS冗余驱动并联机器人刚度特性分布[J]. 北京航空航天大学学报,2014,40(4):500-506.
GUO Jiang-zhen, WANG Dan, FAN Rui.et al. Stiffness characteristics distribution of 3PRS/UPS parallel manipulator with actuation redundancy [J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(4): 500-506. (In Chinese)
[10]宋轶民,翟学东,孙涛,等. 一种三自由度冗余驱动并联模块的刚度分析[J]. 天津大学学报:自然科学与工程技术版, 2015,48(1): 25-32.
SONG Yi-min, ZHAI Xue-dong, SUN Tao, et al. Stiffness aalysis of a 3-DOF rdundantly atuated prallel mdule [J]. Journal of Tianjin University :Science and Technology, 2015, 48(1):5-32. (In Chinese)
[11]YI Lu, WANG Peng, HOU Zhuo-lei, et al. Kinetostatic analysis of a novel 6-DoF 3UPS parallel manipulator with multi-fingers [J]. Mechanism and Machine Theory, 2014,78(78):36-50.
[12]ZHANG Dan, GOSSELIN C M. Kinetostatic modeling of parallel mechanisms with a passive constraining leg and revolute actuators [J]. Mechanism and Machine Theory, 2002,37(6): 599-617.
[13]黄真.并联机器人及其机构学理论[J].燕山大学学报,1998,22(1):13-17.
HUANG Zhen.The parallel pobot[J].Manipulator and Its Mencharism Theory,1998,22(1):13-17.(In Chinese)
[14]CHINTIEN H, HUANG Wei-heng,IMIN K.New consenative stittness mapping for the stewart-gaugh platfarm[C]//Proceedings of the Pobotics and Automation,2002 Proceedings ICRA Washington, DC,USA:IEEE,Conterence Publications, 2002:823-828.
[15]ZHANG Dan, BI Zhu-ming, LI Bei-zhi. Design and kinetostatic analysis of a new parallel manipulator [J]. Robotics and Computer-Integrated Manufacturing, 2009,25(4): 782-791.
