基于轨迹预测的车辆协同碰撞预警仿真研究
2016-11-30宋晓琳熊琦玮曹昊天
宋晓琳+熊琦玮+曹昊天

摘 要:针对已有的车辆碰撞预警系统中车辆轨迹预测的误差较大问题,提出了一种基于DGPS和车载传感器的车辆轨迹预测方法,并采用扩展卡尔曼滤波,实现车辆位置的实时估计;提出了基于等加速度变化率、等横摆角加速度模型的车辆位置预测改进模型和基于V2X技术的协同碰撞预警系统(CCWS);在此基础上,采用模糊理论,实现纵向控制仿真试验,以验证预测模型的有效性.结果表明,基于等加速度变化率、等横摆角加速度模型的车辆位置预测模型误差更小,碰撞预警系统能更早的预警或主动制动.
关键词:纵向控制;轨迹预测;扩展卡尔曼滤波;主动安全;协同碰撞预警系统
中图分类号:U461.91 文献标识码:A
文章编号:1674-2974(2016)10-0001-07
Abstract:Aiming at the problem that the trajectory prediction error in existing vehicle collision warning system(CWS) is relatively large, a DGPS and other vehicle sensors based vehicle trajectory prediction was proposed. Real time vehicle position estimate was realized by using extended Kalman filter (EKF). Then, constant rate of acceleration change, constant yaw rate acceleration model for vehicle position prediction and V2X technology based cooperative collision warning system(CCWS) were proposed. Based on this, the longitudinal control simulation was realized by using fuzzy theory to validate the method. The simulation results show that the vehicle position prediction model based on constant rate of acceleration change, constant yaw rate acceleration model has lower error, and zCWS can get warnings or brake earlier.
Key words:longitudinal control;trajectory prediction;extended Kalman filter(EKF);active safety technology;cooperative collision warning system(CCWS)
随着汽车交通运输的迅速发展,车辆碰撞事故数量居高不下,仅2012年全国共发生汽车交通事故142 995起,造成44 679人死亡[1].为此国内外许多专家学者开展了一系列研究,以减少事故的发生,车辆碰撞预警系统(CWS)便是有效方法之一.
CWS或车道偏离预警等主动安全系统需要对车辆位置或轨迹进行预测,吴沫等将车辆速度和航向角设为定值,进行车辆跑偏检测[2-3];文献[4]将车速设为定值,提出了车辆追尾报警算法.这些研究将车辆纵向速度和航向角或纵向加速度和横摆角速度设为恒定值,仍存在一定误差,导致预警信息不可靠,预测精度有待进一步提高.随着通信技术的发展,V2X技术开始受到关注,其感知范围相对视觉传感器、雷达等自主传感器更广[5-8],可通过基站或其他车辆采用特定的通信方式得到环境信息,虽然车辆的快速移动和网络拓扑结构的快速变化给网络体系结构以及相关协议的设计带来了严峻挑战,但其仍广泛应用于车辆主动安全系统中.谢伯元等基于DGPS和车路协同建立了二次卡尔曼滤波器,对车辆质心侧偏角进行了估计[9].田晶晶等基于车路协同建立了动态车辆安全状态评价模型[10].文献[11]基于多车协作进行了车辆检测和危险预警.另外,随着定位技术的不断发展,差分全球定位系统(DGPS)已被广泛地应用于车辆定位,而差分技术中,载波相位差分技术(RTK,real time kinematic),可达到厘米级的高精度,在智能车辆领域得到了广泛应用[12-14].
但已有的许多研究中[2-4],忽略了车速的变化和车辆的横向运动,车辆模型简化为等加速度等横摆角速度模型,这与实际不符.为此,本文改进车辆轨迹预测方法:该方法采用扩展卡尔曼滤波进行车辆状态估计,基于改进的等加速度变化率和等横摆角加速度模型,进行车辆位置预测.同时,为了验证预测模型,设计协同碰撞预警机制和纵向模糊控制器,并采用直线减速和弯道两种行驶工况仿真试验进行验证.
1 传感器数据的获取
为了描述车辆的运动,需要获取相应的传感器数据,包括描述车辆纵向和横向运动的传感器数据和车辆坐标、航向角.
纵向运动:
对于纵向运动,传感器数据包括节气门开度、制动压力、车速和纵向加速度.若使用节气门开度和制动压力,则需要车辆制动系统、发动机和车辆的纵向动力学模型,这将极大地增加系统的复杂度,且难以保证预测的高精度.而纵向速度和纵向加速度能直接反映车辆的纵向运动,且较易于获得,因此选择速度和加速度来描述车辆的纵向运动.
横向运动:
方向盘转角和横摆角速度可描述车辆的横向运动.但使用方向盘转角则需要特定的车辆横向动力学模型,而横摆角速度可用低成本MEMS模块测得,且精度较高,故选择横摆角速度描述车辆横向运动.
另外,车辆位置预测时还需要车辆在大地坐标中的绝对信息,本文研究车辆通过DGPS获得车辆坐标和航向角.
仿真时,对真实值加入均值为0的白噪声,加入噪声,综合考虑系统成本和精度要求,DGPS定位误差标准差设为0.6 m,车速误差标准差0.5 m/s,航向角误差标准差1°,加速度误差标准差0.5%,横摆角速度误差标准差0.1°/s.
2 车辆状态的估计
为了获得更加准确可信的车辆状态信息,需要对传感器数据进行滤波估计,本文采用扩展卡尔曼滤波(EKF)进行车辆状态估计.该方法分两步:1)时间更新.使用上一时刻状态的估计值进行当前时刻状态的预测;2)观测更新.在得到当前状态的测量值后可对步骤1)中得到的预测值进行修正得到当前时刻更加精确的估计值.与经典卡尔曼滤波相比,它能将非线性函数进行Taylor展开并忽略二阶及以上高阶项,将模型线性化从而应用于非线性模型[15-16].
由此可对系统的6个状态变量进行估计,减小噪声的影响,保证后续车辆位置预测的高精度.经过滤波后的车辆定位和车速误差如图1,图2所示,传感器测量误差与估计误差比较如表1所示,从图和表可知,经扩展卡尔曼滤波估计后,误差大大降低.
3 车辆位置的预测
在已有的许多研究中,车辆模型简化为等加速度等横摆角速度模型,如式(2)所示,也有采用更简单的等速等航向角模型,如式(9)所示:
为了更加准确地描述驾驶员的驾驶行为,提高预测精度,本文提出了车辆位置预测模型,该模型在式(2)的基础上,引入纵向加速度变化率和横摆角加速度,两者通过测量的纵向加速度和横摆角速度计算得出.故车辆位置预测模型为等加速度变化率和等横摆角加速度模型,预测方程为:
预测时,每经过ΔT,车辆对自身进行状态估计,得到估计的位置和传感器数据后,将式(9)重复计算N次,即可得到NΔT后的车辆位置.本文N取50,即得到2.5 s后的车辆位置.
本文基于PRESCAN软件环境,完成了直线加速和弯道两种场景的仿真试验.数据由PRESCAN软件的虚拟传感器得到,加入噪声后进行状态估计和位置预测.
1)直线场景.车辆起步经两次加速至15 m/s.
由图3可知,等速模型由于忽略了车速的变化,在车辆进行加速时产生了较大的预测误差,而等加速度模型的误差则相对较小,但在车辆开始加速和结束加速时均产生了一个滞后的误差,这是由于车辆开始加速时加速度逐渐增大,结束加速时加速度逐渐减小所致,但等加速度变化率模型则克服了这一不足,整体误差均较小.
2)弯道场景.车辆匀速入弯及出弯,车速为10 m/s,弯道半径40 m,车辆路径如图4所示.
由图5可知,车辆约于15 s时进入弯道,约30 s时离开弯道,由于忽略了车辆的横向运动,等航向角模型在车辆处于整个弯道时产生了较大的预测误差,而等横摆角速度模型和本文的等横摆角加速度模型只在车辆入弯和出弯时产生了误差,且等横摆角加速度模型的误差更小.
4 协同碰撞预警
本车通过V2X接收到其他车辆的状态估计后,通过预警算法计算是否有碰撞的危险.协同碰撞预警系统框架如图6所示.本研究危险指标选用碰撞时间TTC(time to collision).一般情况下,驾驶员正常跟车、开始制动和最危险时的TTC值分别为2.9 s,2.0 s和1.0 s[17].由于驾驶员得到预警信息后存在反应时间,故TTC预警阈值需大于2.0 s.为了分析预测时间对预测效果的影响,分别选取预测时间2.1 s,2.5 s和2.9 s,采用等加速度变化率模型对直线加速场景进行仿真研究.预测误差随预测时间的变化如图7所示,预测时间为2.9 s时误差较大,其最大值约为7.9m,故不可取;预测时间为2.1 s和2.5 s的误差均较小,由于驾驶员反应时间和制动系统反应时间的存在,本研究选择TTC预警阈值为2.5 s.两车碰撞定义为两车相对距离小于2.5 m,故2.5 s后两车相对距离小于2.5 m时即触发预警.
为了模拟城市道路工况,研究设置了直线前后碰撞场景和交叉路口碰撞两种场景.本文比较各方法触发预警的时间,即预测到两车2.5 s后相对距离小于2.5 m的时间.预测2.5 s后两车相对距离曲线下降到2.5 m时即为触发预警时间,理想触发预警时间为实际发生碰撞前2.5 s.
1)直线碰撞场景.假设前后两辆车距离20 m直线行驶,车速为20 m/s,前车突然发生故障并开始减速,后车进行碰撞预警,如图8所示.
由图9可知,在直线碰撞场景中,理想的触发预警时间为第3.5 s,等加速度变化率模型、等加速度模型和等速模型的触发预警时间分别为第3.6 s,第4.0 s和第4.5 s.
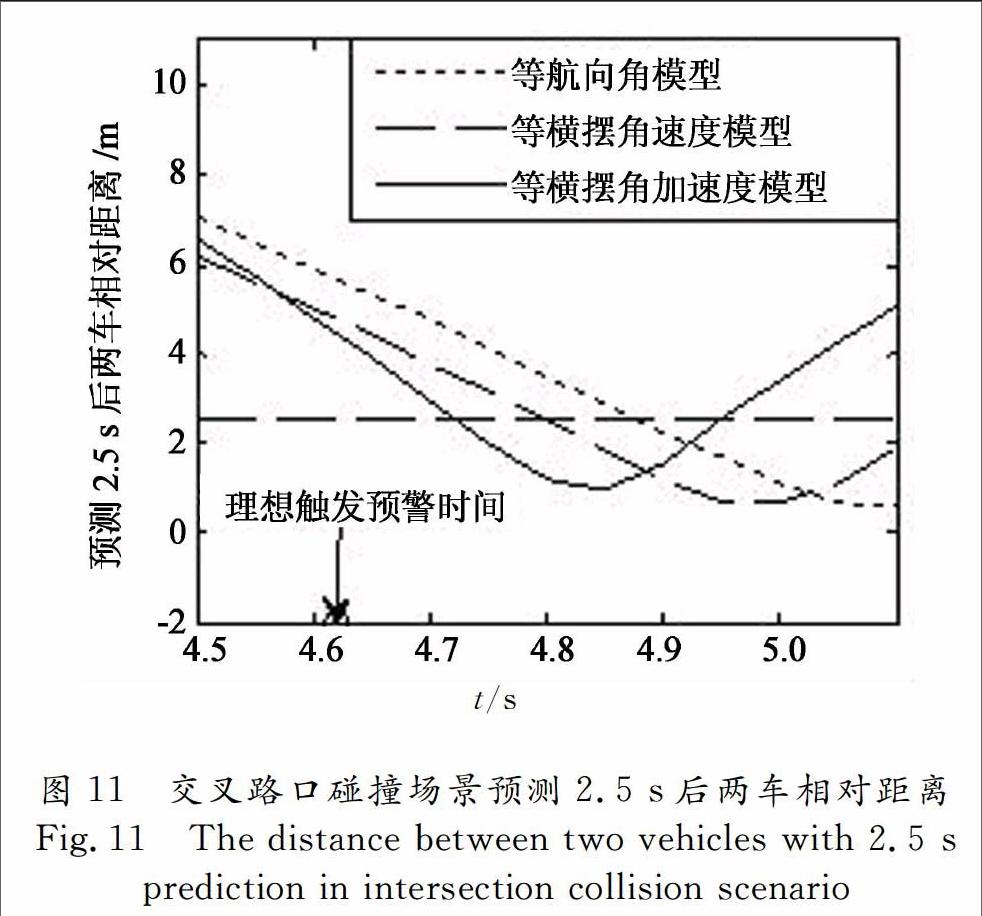
2)交叉路口碰撞场景.假设主车直线行驶穿过交叉口,另有一辆车从交叉口右侧进入交叉口并左转,假设两车在交叉口发生碰撞,主车速度9 m/s,障碍车速度10 m/s,如图10所示.
由图11可知,在交叉口碰撞场景中,理想的触发预警时间为第4.62 s,等横摆角加速度模型、等横摆角速度模型和等航向角模型的触发预警时间分别为第4.72 s,第4.80 s和第4.88 s.
图9和图11的仿真结果显示:等加速度变化率模型与等横摆角加速度模型均比其他模型提前预警,更加接近理想预警的时间,可留给驾驶员或主动制动系统更多的时间来采取机动措施,从而更有效地降低碰撞风险.
为了进一步对预警模型进行验证,本文设计了模糊控制器,对车辆进行纵向控制,在触发预警即TTC值低于2.5 s时进行制动控制.模糊控制器的输入为TTC和两车速度差Δv,输出为节气门开度和制动主缸压强.由于两车的航向角可能不同,Δv由式(11)计算:
同样选用直线前后碰撞场景和交叉路口碰撞两种场景进行了纵向控制仿真,仿真采用不同的预测模型和相同的控制策略.
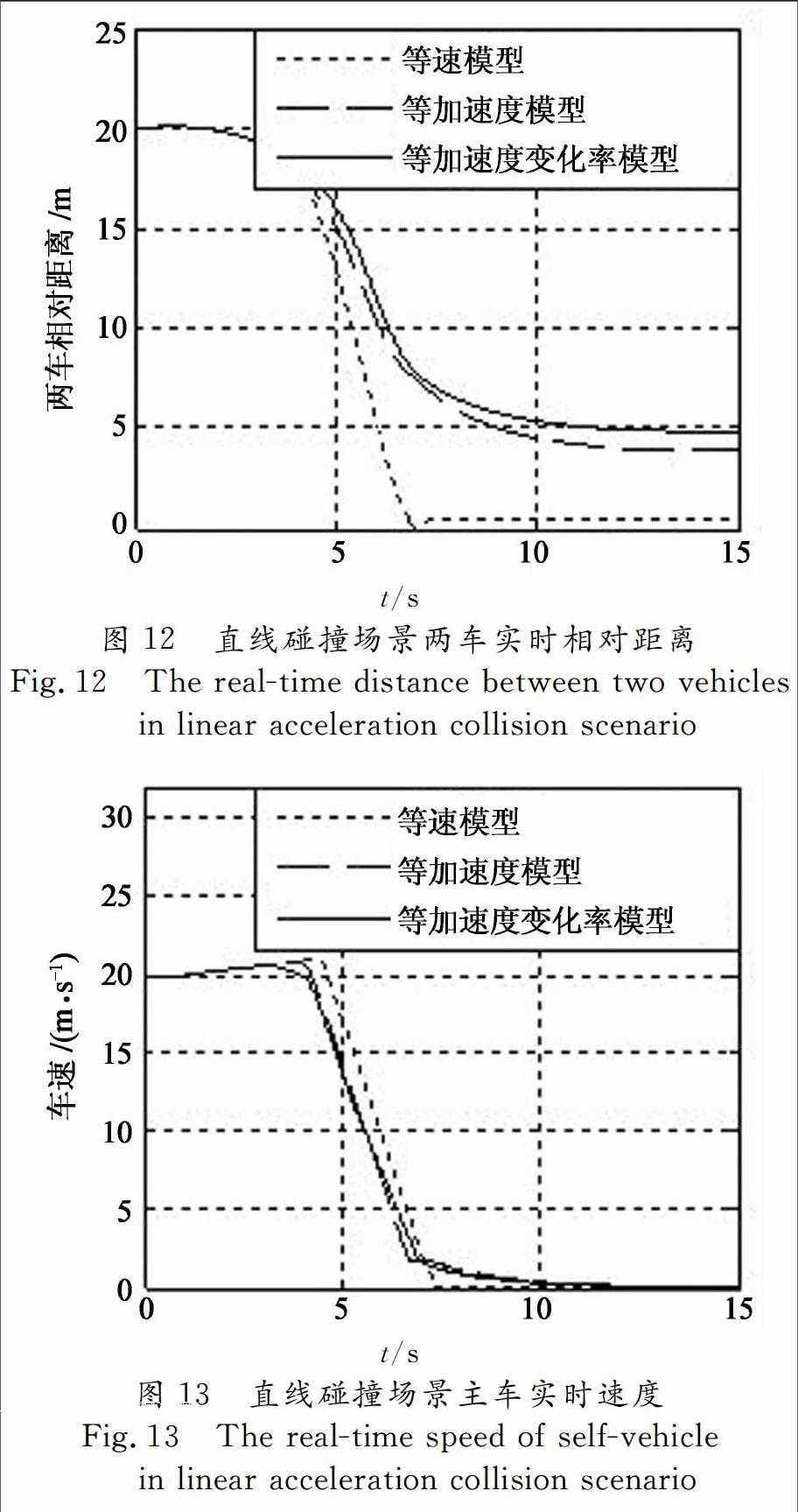
1)直线碰撞场景.仿真结果如图12,图13所示,采用等速模型的车辆不能及时进行制动,导致两车发生碰撞;采用等加速度模型和等加速度变化率模型的车辆均能使车辆安全停车,但后者能更早地进行制动,两车最终距离相对前者更加安全.
2)交叉路口碰撞场景.仿真结果如图14,图15所示,采用等横摆角加速度模型的车辆相对于采用等航向角和等横摆角速度模型的车辆更早地进行制动,两车的最近距离也最大,发生碰撞的可能性更小.
综上所述,在同样的控制策略下,采用等加速度变化率模型和等横摆角加速度模型的车辆比采用其他模型的车辆能够更早地进行制动,两车的最近距离最大,也即碰撞可能性更小.
5 结 论
利用扩展卡尔曼滤波对车辆状态进行了滤波估计,提出了等加速度变化率和等横摆角加速度的车辆位置预测模型,并基于该预测模型提出了车辆协同碰撞预警机制.仿真结果表明:该预测模型误差较小,应用该预测模型方法可更早地进行碰撞预警及主动制动.
参考文献
[1] 中华人民共和国国家统计局. 中国统计年鉴(2013年). 交通事故统计情况(2012年)[DB/OL].[2013-09-22]. http://www.stats.gov.cn/tjsj/ndsj/2013/indexch.htm.
National Bureau of Statistics of the People's Republic of China. China Statistical Yearbook(2013). Traffic accidents statistics(2012)[DB/OL].[2013-09-22].http://www.stats.gov.cn/tjsj/ndsj/2013/indexch.htm. (In Chinese)
[2] 吴沫, 安向京, 贺汉根. 基于视觉的车道跑偏检测方法研究及仿真[J]. 中国图像图形学报, 2007, 12(1): 110-115.
WU Mo, AN Xiang-jing, HE Han-gen. On vision-based lane departure detection approach[J]. Journal of Image and Graphics, 2007, 12(1): 110-115.(In Chinese)
[3] 肖献强, 王其东, 潘盛辉. 基于视觉及 TLC 概念的车辆跑偏检测方法研究[J]. 汽车工程, 2010, 32(1): 77-80.
XIAO Xian-qiang, WANG Qi-dong, PAN Sheng-hui. A study on lane departure detection method based on vision and TLC concept[J]. Automotive Engineering, 2010, 32(1): 77-80. (In Chinese)
[4] 王建强, 迟瑞娟, 张磊, 等. 适应驾驶员特性的汽车追尾报警-避撞算法研究[J]. 公路交通科技, 2009, 26(S1): 7-12.
WANG Jian-qiang, CHI Rui-juan, ZHANG Lei, et al. Study on forward collision warning-avoidance algorithm based on driver characteristics adaptation[J]. Journal of Highway and Transportation Research and Development, 2009, 26(S1): 7-12. (In Chinese)
[5] ARINO M. ITS policy in Japan and smartway[R].Tokyo:ITS Policy and Program Office, 2007: 1-14.
[6] 王庞伟, 余贵珍, 王云鹏, 等. 基于滑模控制的车车协同主动避撞算法[J]. 北京航空航天大学学报, 2014, 40(2): 268-273.
WANG Pang-wei, YU Gui-zhen, WANG Yun-peng, et al. Cooperative active collision avoidance algorithm based onsliding mode control[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(2): 268-273. (In Chinese)
[7] 常促宇, 向勇, 史美林. 车载自组网的现状与发展[J]. 通信学报, 2008, 28(11): 116-126.
CHANG Cu-yu, XIANG Yong, SHI Mei-lin. Development and status of vehicular ad hoc networks[J]. Journal on Communications, 2008, 28(11): 116-126. (In Chinese)
[8] CAVENEY D. Cooperative vehicular safety applications[J]. Control Systems, IEEE, 2010, 30(4): 38-53.
[9] 谢伯元, 王建强, 秦晓辉, 等. 基于车路协同的车辆状态估计方法[J]. 汽车工程, 2014, 36(8): 968-973.
