一种基于自由设站法连续传递附合至地铁隧道平面控制点的方法
2016-11-28吴乃龙
吴乃龙
(福州市勘测院,福建 福州 350108)
一种基于自由设站法连续传递附合至地铁隧道平面控制点的方法
吴乃龙*
(福州市勘测院,福建 福州 350108)
针对轨道交通工程铺轨控制基标测量要求高、难度大、效率低等特点,提出一种类似于地面高铁布设CPⅢ控制网进行施测的方法,即基于自由设站法连续传递附合至地下平面控制点的方法。介绍了该方法的原理及其精度评定。并以某地铁工程为例,阐述了该方法在盾构隧道中的应用。结果表明,该方法可在一定条件下替代铺轨控制基标进行施工测量。
地铁隧道;自由设站法;连续传递附合法;铺轨控制基标;精度分析
1 引 言
近年来,随着国民经济的迅猛增长,全国各省市的城市轨道交通建设也随之增加。在城市地铁建设技术不断成熟的同时,所遇到的难题种类也不断增多。轨道交通工程中的铺轨控制基标[1]精度要求高[2]、保存时间长、调整难度大,尤其是盾构法施工隧道,雾气浓、光线差、有效测量视线短等难点,严重影响了测量作业效率和精度。为此,寻求一种能够替代铺轨控制基标作用、降低地铁盾构隧道中的劳动强度和作业成本,并提高作业效率和精度的测量方法已迫在眉睫。
本文针对地铁盾构法中施工测量效率低、难度大以及铺轨控制基标精度要求高等特点,提出了一种与地面高铁布设CPⅢ控制网[3,4]进行施测的类似方法——基于自由设站法[5]连续传递附合至地下平面控制点的方法。先是测量隧道内各待定点(视为CPⅢ点)的坐标,以CPⅢ点作为已知点进行施工测量[6],而后以某市地铁相邻两车站盾构隧道区间[7]为实例,研究分析该测量方法得出的CPⅢ点位精度[8],并探究以CPⅢ点作为已知点进行施工定测所得到的未知点精度,得到采用该测量方法可替代铺轨控制基标作用的结论。
2 自由设站法
全站仪自由设站法是在一个任意点上设站,对多个已知平面控制点(至少两个)和待定点进行边角观测,将观测得到的方向值、距离值和天顶距按间接平差[9]或条件平差[10]方法进行计算,从而得到设站点和待定点的坐标值。
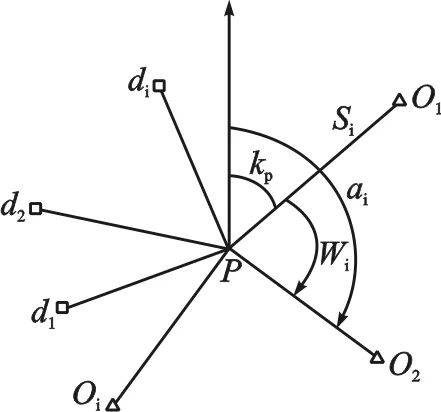
图1 自由设站法示意图
如图1所示,Oi(xi,yi)为已知点,P(xp,yp)为任意点,di(xi,yi)为待定点,在P点架站,观测已知点Oi,得到方向值wi及距离Si,i=1,2,…,n。观测待定点di,得到方向值、垂直角及平距。则P点的平面坐标为:
(1)
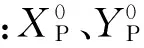
采用间接平差法进行计算,则其误差方程为:
V=BX-L
(2)

X=(BTPB)-1BTPL
(3)
其中为P权阵,取距离观测中误差为ms,方向观测中误差为mk,取方向权值为1,则距离权值为:
(4)
式中:mS=±(a+b·S),a为测距固定误差,b为测距比例误差,S为距离。
设方向观测值mk为单位权观测值σ0,即:
(5)
未知数的协因数阵为:
(6)
则有设站点P的点位中误差为:
(7)

通过自由设站法观测计算得到设站点P的坐标和精度后,即可对待定点的坐标和精度进行估算,其坐标公式为:
(8)
其中Hi为天顶距,设mV=mk,根据误差传播定律[11],待定点在未考虑已知点时观测阶段的中误差为:
(9)
由上述可知,待定点中误差主要来源于自由设站点的点位中误差mp,待定点在观测阶段时中误差mg以及棱镜的对中误差mJ,即待定点的中误差如下:
(10)
由式(10)可知,若是在盾构隧道中,待定点的位置已安装好固定棱镜,则待定点精度高低只取决于仪器的测角和测距精度的高低。
3 基于自由设站法连续传递附合法
3.1 基本原理
连续传递附合法的基本原理即以某一隧道端头井的地下已知平面控制点(视为CPⅡ点)作为起始点,使用自由设站法在隧道区间内连续重叠观测传递,最终附合到相邻端头井的地下已知平面控制点。经约束平差后(或先对待定点进行无约束平差再进行坐标转换,本文采用约束平差法)[12],得到各待定点的平面坐标。
如图2所示,A、B、C、D为CPI网通过联系测量传递至地下的CPⅡ已知平面控制点,Ni为CPⅢ待定点,Pi为自由设站点,其中i=1,2,…,n,设站顺序即为P1~Pn。

图2 连续自由设站传递附合平面控制网示意图
3.2 精度评定
上述2.2已对每一次自由设站的设站点和CPⅢ点的精度进行了分析,而在连续传递附合时,CPⅢ平面网最主要的精度指标,是相邻CPⅢ点之间的相对点位中误差。设有两相邻的CPⅢ点Ni(xi,yi)、Nj(xj,yj),其相对位置可通过坐标差来表示:
(11)
根据协因数传播律可得:
(12)
故相邻CPⅢ点间的相对点位中误差为:
(13)
其中:

4 工程实例
某市地铁两相邻站点区间隧道里程为DK016+320.450~DK017+505.362,隧道结构采用盾构法施工,全长为 1.185 km,两端车站长度分别为 120 m和 116 m,纵深分别为 18.4 m和 15.7 m,车站内各有两个通过联系测量传递至地下的已知平面控制点,在盾构隧道内以 60 m左右为间距布设CPⅢ点,共布设21对,并分别进行按N1~N42进行编号。使用瑞士Leica Nova TS50i高精度全站仪进行观测,其测角精度mk=±0.5″,测距精度ms=±(0.6+1ppm),并有自动搜索棱镜、照准、观测和记录等功能。观测方法如图2所示,除首站和末站观测6个方向外,其余每站观测方向均为8个;除首、末两排被观测3次外,其余每个CPⅢ点均被观测4次;合计架设23站。观测技术要求如表1所示:
4.1 基于自由设站法连续传递附合法计算与精度分析
设方位角观测权值为1,其中mk=±0.5″,ms= ±(0.6+1ppm),则距离观测值的权可由式(4)得出;在盾构隧道内安装可拆卸式棱镜,其棱镜对中误差mJ可忽略,即式(10)可变为:
(14)
导入原始观测数据,根据上述条件使用MATLAB[13]编程进行约束平差计算(按图2方式对设站点进行编号),得到:
(1)方向改正数
(2)距离改正数

距离改正数最大值 表3
(3)点位中误差

最弱点点位中误差 表4
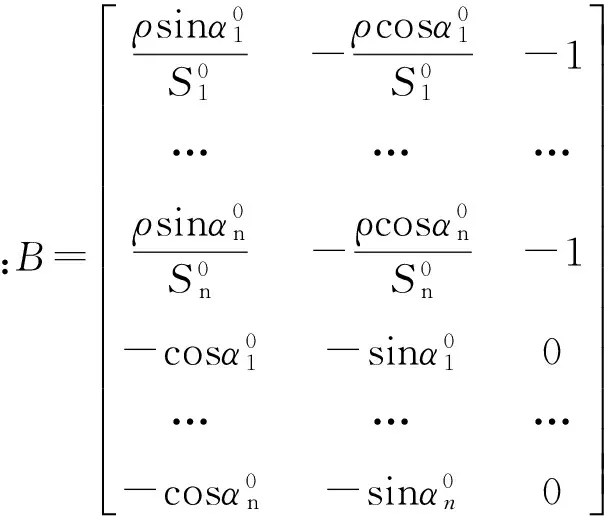
(4)方位角观测中误差、距离观测中误差与相邻点间相对中误差

方位角观测中误差、距离观测中误差与相邻点间相对中误差 表5
4.2 一般精密导线测量方法计算与精度分析
以上述工程为例,其盾构隧道已按设计要求布设铺轨控制基标11个(编号K1~K11),相邻控制基标间距离约为 100 m~120 m,使用瑞士Leica Nova TS50i高精度全站仪,按精密导线测量技术要求,以附合导线观测方式进行测量,将观测数据经约束平差后,得到:
(1)方向改正数

方向改正数最大值 表6
(2)距离改正数

距离改正数最大值 表7
(3)点位中误差

最弱点点位中误差 表8
(4)方位角观测中误差、距离观测中误差与相邻点间相对中误差(表9)
方位角观测中误差、距离观测中误差与相邻点间相对中误差 表9
4.3 不同测量方法未知点位精度对比
(1)以CPⅢ点为已知点测量未知点的精度
如图3所示,在隧道中任意自由设站,从最近的8个CPⅢ控制点中,任意选取两个CPⅢ点为已知点采用方向观测法观测,而后再观测未知点M。由观测过程可知,未知点M的点位精度主要受设站点精度和极坐标测量精度影响。

图3 隧道内自由设站法观测示意图


由式(4)有权阵:
则由式(6)得:
由式(7)有设站点PN点位中误差为:
假设测量点M距离设站点的距离为 60 mm,则有:
ms=±(0.6+1×60×10-6)=±0.66 mm
故由式(9)得:

=0.46 mm2
因CPⅢ点已固定,故棱镜对中误差可忽略,根据式(10)有:

=±2.50 mm
(15)
独立观测2测回,则未知点精度:
(2)以铺轨控制基标为已知点测量未知点的精度
如图4所示,在铺轨控制基标点上设站,以另一铺轨控制基标定向,采用极坐标法对M点进行观测。以上述4.3为例,在铺轨控制基标精度最弱点K5上设站,后视为K4,则M点的点位精度主要来源于:铺轨控制基标的点位中误差mk5、设站点对中误差mz、后视点棱镜对中mJ1误差以及仪器的测角精度mk和测距精度。

图4 极坐标法观测示意图
假设mz=0.5 mm,mJ=1 mm,M与控制基标距离为 60 m,则根据误差传播定律未知点M的点位中误差为:

=±1.96 mm
(16)
5 结 论
轨道交通工程中的铺轨控制基标对于盾构隧道测量非常重要,但由于测设难度大、精度要求高、受限条件多,导致使用时非常不便。文中论述的测量盾构隧道内待定点的方法类似于求定CPⅢ控制网的一种测量方法,综上论述,有以下结论:
(1)基于自由设站法在盾构隧道内进行连续传递附合测量,可得到盾构隧道内的待定点坐标精度较高,且不易受损毁。
(2)以盾构隧道内的局部CPⅢ控制点作为已知点,对未知点进行测量精度略低于以铺轨控制基标作为已知点对未知点进行测量的精度;在适当增加观测测回数时,其测量未知点的点位精度与其相当,并可代替铺轨控制基标,满足施工测量需求。
(3)以文中所述方法测量得到待定点坐标后,可在盾构隧道内自由设站,不仅受观测条件限制少,而且消除了设站点对中误差和起始方向点的棱镜对中误差。
虽然上述CPⅢ控制点比铺轨控制基标在使用过程中较为便捷,但在自由设站时,设站点与选取的CPⅢ点位之间组成的网形、原始数据的粗差探测以及CPⅢ控制网定期复测繁琐等问题,还有待进一步研究。
[1] 梁希福,杨自齐,李伟. 地铁铺轨基标测量的关键技术及质量控制[J]. 测绘科学,2010(1):106~108.
[2] 汪晶. 地铁铺轨控制基标的归化改正计算[J]. 铁道勘测与设计,2014(2):18~20.
[3] 马文静,刘宏江. CPⅢ平面网的解算方法研究及仿真计算[J]. 铁道勘察,2009,35(1):18~21.
[4] 王国昌,徐小左,刘成龙. 高速铁路CPⅢ平面网的闭合差研究及其应用[J]. 铁道学报,2009,31(5):79~83.
[5] 张建坤,王金明,贾亮. 自由设站法进行基坑监测的精度分析[J]. 测绘工程,2011(4):74~76.
[6] 金花,张碧,孙立功. 天津地铁二号线盾构施工测量技术研究[J]. 勘察科学技术,2011(4):12~16.
[7] 张伟国. 采用自由设站边角交会法测量隧道内CPⅢ平面控制网的技术分析[J]. 矿山测量,2011(5):57~59.
[8] 王庆,于先文. 顾及已知点精度的自由设站算法及精度分析[J]. 东南大学学报,2009,39(2):372~376.
[9] 何荣,崔灿. 基于间接平差的自由设站法与监测点联合平差研究[J]. 河南理工大学学报,2013,32(3):298~301,319.
[10] E S jboberg L. Unbiased estimation of variance-convariance components estimation in condition adjustment[J]. Department of Geodesy,1983:223~237.
[11] 杨凤芸,刘玉梅. 间接平差中协因数传播定律的应用[J]. 辽宁科技大学学报,2011(6):47~50,55.
[12] 武汉大学测绘学院测量平差学科组. 误差理论与测量平差基础[M]. 武汉:武汉大学出版社,2003.
[13] 姚连壁,周小平. 基于MATLAB的控制网平差程序设计[M]. 上海:同济大学出版社,2006.
A Method that Closing to the Control Point of Plane in Continuous Passing in the Subway Tunnel Based Free Station
Wu Nailong
(Fuzhou Investigation and Surveying Institute,Fuzhou 350108,China)
The paper put forward a method which setting control network that similar to the CPⅢ of ground high-speed rail to measure for the characteristics of measure of track-laying control standard in rail transit projects are high demand,huge difficult,low efficiency,etc. And the Method is closing to the plane control points of underground in continuous passing based free station. It introduces the principle and precision evaluation of the method. Also,it taking a subway project as an example,described the application of the method in shield tunnel. Results show that the method can be instead of track-laying control standard for construction survey in certain conditions.
subway tunnel;free station;the method of transfer combining continuously;track laying control standard;precision analysis
1672-8262(2016)05-140-05
P258
B
2016—04—17
吴乃龙(1988—),男,硕士,工程师,主要从事轨道交通精密工程测量和地壳形变研究工作。
