基于Creo的装载机抱叉三维建模及运动仿真
2016-11-28谢国进何泽强黄光永谌炎辉
谢国进,何泽强,黄光永,谌炎辉
(广西科技大学机械工程学院,广西柳州545006)
基于Creo的装载机抱叉三维建模及运动仿真
谢国进,何泽强,黄光永,谌炎辉
(广西科技大学机械工程学院,广西柳州545006)
抱叉作为一种以轮式装载机为基础而开发的器械,具有高效、适应性强、用途宽广、操作方便等特点。借助C reo 2.0软件对装载机抱叉进行三维实体的构建,在Creo集成环境中对抱叉进行虚拟装配,将装配完毕的虚拟样机导入C reo Parametric机构分析模块,对其进行机构运动仿真,结果表明装载机抱叉运动良好且无干涉,验证了装载机抱叉的设计初步可行,Creo原始数据能为后续的机构设计及优化工作提供分析与借鉴。
装载机抱叉;Creo Parametric;三维建模;运动仿真
装载机是一种通过在前端安装一个铲斗、抱叉等不同工作装置,随着装载机的运动方向进行装载或抱夹,以及举升、运输和卸载的工程机械。抱叉是一种为了满足轮式装载机适应不同作业环境而设计的机构,具有效率高、灵活性强、适应性好、应用范围广、操作简单方便等特点,尤其适合应用于民用建筑、水利建设等需要装卸、装运和堆砌圆形规则物料和不规则长形物料的大型工程,诸如在港口、林区装卸堆砌木材;建设油田时利用抱叉转运和铺设油管、钻杆等作业过程;在码头或车站起重、牵引不规则圆形长物料的作业[1]。配置抱叉的轮式装载机能够缩短施工的时间、替代强度高的体力劳动、降低人力资源成本、提高生产效率,所以它在我国国民经济建设的价值也越来越高。
CAD/CAM技术不仅能方便建立符合设计者意图的三维模型,加快产品研发速度,还能将建立好的产品模型在设置好各项参数的条件下对实际工作状况进行仿真,通过仿真数据分析,可以看出所设计的产品是否符合要求,各运动件之间是否存在干涉,从而能在产品实际生产出来之前进行产品结构的改进,提高了设计效率和产品质量。因此,CAD/CAM技术在如今的研发、设计和制造领域已成为了必不可少的技术支持工具。Creo是Pro/ENGINEER的改进产品,Creo Parametric是完全面向用户的组件装配的造模参数化应用软件,与早期手工绘制二维工程图的设计技术相比,三维建模技术与实例仿真技术弥补了绘制、修改工程图的繁琐和设计周期长的缺点,增强了新产品的研发速率和稳定性[2]。
1 抱叉的三维建模
装载机工作装置的抱叉由上叉体、下叉体和油缸组成,分别进行建模,最后以机械约束集的方式装配成抱叉。通过借助Creo Parametric中的草绘(Sketch)、拉伸(Extrude)、旋转(Re.volve)、螺旋扫描(Helical Sweep)、造型(Style)、阵列(Pattern)、环形折弯(Toroidal Bend)等指令实现工作装置参数化实体建模[3]。
1.1 上下叉体的建模
上叉体是由上叉体左夹叉、右夹叉、方钢、挡板、支板、筋板焊接而成的。通过以上述参数化实体化建模方法先绘制上叉体右夹叉模型,然后以右夹叉为基础依次绘制出方钢、左夹叉、挡板、支板和筋板便可得到上叉体模型,如图1所示。下叉体是由两个夹叉,三个中间支座、三个圆钢、两块横梁弯板、一块横梁板焊接而成的。因此可以先建立圆钢的模型,然后添加绘制另外两个中间支座,并绘制横梁弯板和横梁板以支撑,最后绘制两侧的夹叉。下叉体模型,如图2所示。上叉体与下叉体的相对运动能改变抱叉的抱圆直径,以便抱夹不同大小的物料,上叉体与下叉体相对位置的改变也会使得物料的受力位置和大小产生改变。

图1 上叉体

图2 下叉体
1.2 油缸活塞杆、缸体的建模
活塞杆的建模。首先,通过拉伸建立主体部分的圆柱,然后依次以圆柱底面为草绘平面拉伸两个小圆柱,以圆柱的其中一个基准平面为草绘面绘制一个封闭的半圆,使用旋转特征生成一个球,再以通过球心的一个基准平面为草绘面,绘制由弧线和直线组成的小半圆,用切除材料的方式拉伸后将球的两侧切除,使用孔特征在球上开一个通孔,可建立活塞杆的三维模型如图3所示。油缸缸体的建模,其建模方法和活塞杆基本类似。首先绘制圆形,拉伸后得到缸体的外圆柱,以缸体上表面为草绘面绘制一个圆形,采用切除材料拉伸后得到缸体部分。然后再使用旋转特征在缸体外表面上切槽,结合去除材料的方式拉伸生成其他细节部分,油缸缸体三维模型如图4所示。

图3 油缸活塞杆

图4 油缸缸体
2 抱叉的装配
2.1 上下叉体的装配
操作步骤如下,第一步,在Creo Parametric中建立一个新的装配文件并打开,单击组装按钮打开下叉体,约束类型选取使其固定。第二步,打开上叉体模型,选取销连接,分别选取上叉体孔的中心轴线和下叉体左右支座的中心轴线为轴对齐参考约束,上叉体的外侧面和下叉体左右支座的内侧面两平面为平移约束参考。第三步,打开油缸模型,选取销连接,分别选取下叉体内侧支座孔的中心轴线和油缸腔体的孔的中心为轴对齐参考约束,下叉体孔的侧面和油缸腔体孔的外侧面两个平面为平移约束的参考,再次新建约束集,选取销连接,分别选取上叉体末端孔的中心轴线和油缸活塞的孔的中心为轴对齐参考约束,上叉体末端孔的侧面和油缸腔活塞的外侧面两个平面为平移约束参考。第四步,重复步骤三,装配另一侧的油缸,最后抱叉的装配图如图5所示。
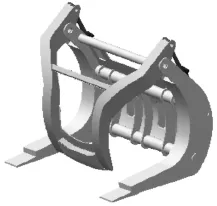
图5 抱叉的装配
2.2 油缸的装配
添加运动元件油缸活塞。在连接列表选取滑块选项,然后分别选取油缸活塞中心轴线和油缸腔体中心轴线为轴对齐参考约束,选取油缸活塞端面和油缸腔体内的端面这两个平面作为平移轴参考,油缸的装配模型图如图6所示。平移轴的参数待定,求出油缸的最大行程后再返回此步输入具体数值。

图6 油缸的装配
3 抱叉的运动仿真
抱叉作为一个独立的整体来看,其上叉体和下叉体之间的相对运动是受油缸的伸缩得以实现,在Creo集成环境中,需要通过给机构定义伺服电动机来进行运动仿真与分析。由于油缸的运动轨迹未知,无法给出油缸行程的具体数值,因此,在上叉体与下叉体销轴连接孔处需设置电机来检查干涉,以确定油缸的最大行程及抱叉的运动范围。
3.1 油缸行程的位置仿真
新建伺服电动机,选取上叉体与下叉体的销连接为运动轴,轮廓规范为位置,模选择表内参数设置为上叉体每秒相对下叉体旋转60°,根据仿真结果可知,上叉体从初始位置开始运动接近2 s时,机构之间发生干涉,可以得出油缸活塞的最大行程为390 mm.返回至油缸的装配,进行平移轴参考参数设置。设置活塞完全插入油缸缸体内为零位置,勾选启用重新生成值、最小限制和最大限制,设置最小限制值为0mm,最大限制值390 mm.通过分析测量结果,由图7和图8可以看出,当上叉体与下叉体相对张开程度达到最大时,其最大抱圆直径为1 805 mm,当上叉体与下叉体间相对张开程度最小时的最小抱圆直径为414mm.

图7 抱叉合拢时的最大抱圆直径

图8 抱叉合拢时的最小抱圆直径
3.2 创建运动包络
运动包络表示的是模型在整个运动过程中经过的范围,是一组三角形的片体模型或是实体模型。运动包络常常被用来模拟机构正常运动过程的空间区域[4]。从图9中可以看出上叉体的运动过程的位置空间与下叉体等其他部位没有产生干涉,可验证机构设计的合理性。

图9 抱叉运动包络
3.3 创建轨迹曲线
轨迹曲线通过曲线表示装配模型中某点相对于模型的运动。选取上叉体挡板尖点,生成轨迹曲线,由其投影可测出,抱叉运动轨迹最大夹角为114°,如图10所示。

图10 创建轨迹曲线并测量其夹角
3.4 运动学分析
机械运转的速度波动对机械的工作时不利的,它不仅影响机械的工作质量,也会影响到机械的效率和寿命,所以必须设法加以控制和调节[5]。抱叉应适于中低速作业,抱叉张夹速度和活塞伸缩速度应平稳,波动较小。不考虑重量、摩擦等因素,假定抱叉上叉体以一定速度做匀速运动,对油缸活塞伸缩的运动进行仿真。若收拢过程时间为6 s,由所求抱叉运动轨迹最大夹角114°,计算得其运动速度应为19(°)/s.在销轴上定义伺服电动机,使上叉体以19(°)/s的速度逆时针旋转6 s.设置相关参数后,定义测量,可得活塞伸出推程、速度及加速度测量数据,曲线图分别如图11、12、13所示。由测量结果可知,油缸活塞伸出的行程、速度和加速度函数曲线均是光滑的,说明机构作业时,抱叉的抱夹和油缸活塞伸缩的速度平稳、波动较小,不会引起较大的机械振动。另外,活塞伸出时能够做类似余弦加速度推程运动,该运动适用于中低速重载的场合,符合抱叉在作业时承受大量物料,抱夹收拢张开较慢的工作要求。

图11 活塞伸出位置曲线图

图12 活塞伸出速度曲线图

图13 活塞伸出加速度曲线图
4 结束语
在Creo Parametric 2.0软件环境下进行装载机抱叉的三维建模工作,并对该抱叉建立的模型通过特定约束方式装配,然后定义了伺服电动机和初始分析条件进行运动仿真与分析,根据位置分析求出油缸的合理行程,以及抱叉的最大抱圆直径、最小抱圆直径,通过绘制轨迹曲线测出抱叉运动轨迹的最大夹角。并通过运动包络对模型进行干涉检查,验证所取设计参数的合理性。最后,通过运动学分析判定抱叉能够满足工作时速度平稳、波动小、中低速运动、承受重载的性能要求。该方法能直观地观察装载机抱叉模拟工作状态,能对设计中存在的问题进行改进与优化,具有一定的工程设计实际意义。
[1]徐东云,张永胜.夹钳装置干涉问题的分析[J].工程机械,2004,(11):26-29.
[2]姜俊杰.Pro/Engineer Wildfire高级实例教程[M].北京:中国水利水电出版社,2004.
[3]李耀翔,龙剑群.基于Creo的木材装载机三维建模与工作装置运动仿真[J].安徽农业科学,2014,42(15):4693-4695.
[4]詹友刚.Creo2.0运动仿真与分析教材[M].北京:机械工业出版社,2015.
[5]孙桓.机械原理[M].北京:高等教育出版社,2013.
Three-dimensional Modeling and Motion Simulation of Loader’s Fork Based on the Creo
XIE Guo-jin,HE Ze-qiang,HUANG Guang-yong,CHEN Yan-hui
(Guangxi University of Science and Technology,Mechanical Engineering Institute,Liuzhou Guangxi 545006,China)
As a kind of instrument,loader’s fork developed on the basis of the wheel loader is with a high efficiency,strong adaptability and wide applications,convenient operation,etc. Three-dimensional modeling of loader’s fork and motion simulation is studied based on Creo 2.0,Virtual design is implemented for the loader’s fork is assembled in the virtual environment,the virtual prototype is then imported to the analysis module of the Creo Parametric for mechanism motion simulation. The results show that the movement of loader’s fork is good and no interference,verify the loader’s fork of preliminary design is feasible,this study could provide useful information for future machine design and improvement.
loader’s fork;creo parametric;three-dimensional modeling;motion simulation
T H122
A
1672-545X(2016)09-0009-04
2016-06-27
广西教育厅重点资助项目(No.ZD2014074);广西科技大学博士基金项目(校科博13Z13)资助。
谢国进(1980-),男,湖南邵阳人,工学硕士,工程师,主要研究方向:机电一体化。
