ARM平台的高稳定度实时转速测量方法
2016-11-26陈飞张天宏罗震
陈飞,张天宏,罗震
(南京航空航天大学 能源与动力学院 江苏省航空动力系统重点实验室,南京 210016)
ARM平台的高稳定度实时转速测量方法
陈飞,张天宏,罗震
(南京航空航天大学能源与动力学院江苏省航空动力系统重点实验室,南京210016)
基于ARM平台设计了一种针对磁电式转速传感系统的高稳定度实时转速测量方法,该方法能够有效消除传统转速测量方法无法克服的由计数误差和脉冲发生器的加工误差引起的转速测量波动。针对所设计的转速测量方法进行试验,结果表明,所设计的转速测量方法能有效消除测量结果波动,且实现简单,动态跟踪效果好。
高稳定度;实时;ARM;磁电式转速传感系统
引 言
转速测量是对航空发动机、内燃机、电机等旋转型动力机械进行测试、控制的最基本、最重要的任务,一般希望获得准确、及时的转速信息,这直接关系到控制器的控制效果[1]。传统的转速测量的方法主要有3种:测频法、测周法和组合测周法。测频法适用于高频信号,测周法适用于低频信号,组合测周法适用于高、低频率信号,但是不适用于实时测量[2]。
磁电式转速传感系统由永磁铁、软铁、感应线圈和脉冲信号发生器(如音轮)组成,其输出信号易受脉冲信号发生器加工误差、分度误差、偏心误差等影响,在宽转速范围情况下,传统的转速测量方法往往存在测量结果波动、误差大或实时性差等问题。本文设计的高稳定度实时转速测量方法既能消除由计数误差和脉冲发生器的加工误差引起的测量波动,又能保证良好的动态跟踪效果。
目前ARM内核微控制器发展迅速,其性能高、耗电少、成本低,具备16/32位双指令集。本文选用TI公司的基于Cortex-M4内核的TM4C123GHP6M芯片,该芯片最高具备80 MHz主频,且包含多个高精度定时器,满足高稳定度实时转速测量算法的实现要求[3-5]。
1 高稳定度实时转速测量方法原理
本文设计的高稳定度实时转速测量方法包括3个部分:基于惯性原理的平稳测量、基于组合测周法的实时跟进、基于容差的双转速综合处理。基于惯性原理的平稳测量和基于组合测周法的实时跟进同时采集转速传感器最新的输入信号,分别产生2个转速测量值,基于容差的双转速综合处理方法对上述2个转速测量值进行综合处理判断,选择其一作为当前转速值。
平稳测量方法依据最新一段时间内的平稳运行参数序列来计算得出平稳转速值。具体计算方式是求取当前平稳运行参数序列的平均值,用定时计数器的时钟频率除以上述平均值得到脉冲信号的频率值,将此频率值按频率转速比转换为转速值,得出当前平稳转速值。由于转子的惯性,在平稳运转期间,其转速不会发生瞬间快速波动,为此可以根据最新一段时间内的平稳运行参数序列测量当前的转速,这个转速值就非常平稳,不会出现瞬间快速波动,这也就是所述的惯性原理。
平稳运行参数序列是实时更新的,其长度与脉冲发生器的特征和测量精度要求有关,对于带音轮的脉冲发生器,序列长度可取音轮的齿数,对于齿数较少的(比如4个齿以下的),可取齿数的整数倍(比如2~4倍),从而获得平稳转速。平稳运行参数序列的更新方法是,每采集到一个脉冲信息,则将其加入到平稳运行参数序列的入口端,而序列中最早采集到的脉冲信息则从平稳运行参数序列的出口端去除,如图1所示。在tn+1时刻采集到一个新的脉冲信息Datan+1,则Datan+1将被加入到平稳运行参数序列的入口端,tn时刻的数据整体向出口端平移,Datan-m从出口端去除。

图1 平稳运行参数序列的更新方式示意图
实时跟进方法采用常规的组合测周法获得,并根据转速的最大可能波动量(即惯性极限波动量)剔除测量野值。如果实时转速值与上一次的转速测量值的偏差大于惯性极限波动量,则认为当前测量值为野值,剔除该值。转子的惯性极限波动量是根据转子的惯性并结合正常加减速能力推算出的采样瞬间可能的转速最大波动量。图2是实时跟进方法的流程图。

图2 实时跟进方法流程图
综合处理方法依据测量波动量容差和平稳转速与实时转速的偏差,选择其一作为当前转速。如果平稳转速与实时转速的偏差大于测量波动量容差,则当前转速为实时转速,如果平稳转速与实时转速的偏差小于等于测量波动量容差,则当前转速为平稳转速。所谓容差,就是由于脉冲发生器的加工误差导致的脉冲信号频率的可能波动量。对于数控线切割加工的音轮,其齿轮分布误差能控制在1%以内,因此容差可以设定为当前转速的1%或者更小,具体可以依据实际试验效果设定。
2 高稳定度实时转速测量方法的实现
基于高稳定度实时转速测量方法原理,本文充分利用TM4C123GHP6M芯片的32/64位通用定时器和串口通信模块,设计了一个转速采集控制器。
由高稳定度实时转速测量方法的原理可知,无论是平稳测量方法还是实时跟进方法都需要通过平稳运行参数序列计算相应转速值,因此平稳运行参数序列的实时更新是该算法实现的关键。为了实现对脉冲信号的实时采集,利用TM4C123GHP6M芯片32/64位通用定时器的输入边沿计数捕获中断功能,计数值设为1,上升沿采集,这样就实现了在每一个脉冲信号,程序会进入中断程序更新平稳运行参数列表。具体流程如图3所示。

图3 平稳运行参数序列的数据采集更新流程图
代码如下:

整个转速采集控制器程序结构如图4所示,共分3个部分。中断程序是由32/64位通用定时器模块实现的,一路提供20 ms的精确计时,一路进行平稳运行参数序列的实时更新。高稳定实时转速计算程序负责计算当前的实际转速,通信程序将当前的转速上传给上位机进行显示。

图4 转速采集控制器程序结构
3 试验结果和分析
本文设计的转速采集控制器的计数频率是80 MHz;试验系统采用带音轮的脉冲发生器,齿数为60,因此平稳运行参数序列长度选为60;依据测量的实时性和精度要求,选取平稳运行参数序列的最新的4个数据求取当前实时转速值;惯性极限波动量设为500 r/min,测量波动量容差设为0.5%。图5是实际试验效果。
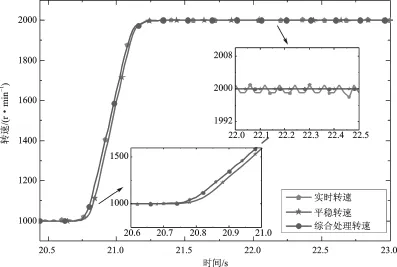
图5 实际试验效果图
对图中20.6~21.0 s转速加速升高阶段和22.0~22.5 s转速平稳阶段的曲线进行放大,可以明显看到:加速升高阶段,实时转速值的响应速度明显要快于平稳转速,此时平稳转速与实时转速的偏差超过测量波动量容差,当前的转速测量值取实时转速,因此综合处理转速曲线与实时转速曲线重合,动态跟进效果好,实时性高;转速平稳阶段采用传统测周法获得的实时转速一直在波动,此时平稳转速与实时转速的偏差小于测量波动量容差,当前的转速测量值取平稳转速,因此综合处理转速曲线与平稳转速曲线重合,消除了由计数误差和脉冲发生器加工误差引起的测量波动。
结 语
本文设计并在TM4C123GHP6M芯片上实现了一种高稳定实时转速测量方法。该方法实现简单,设计新颖,能够消除由计数误差和脉冲发生器加工误差引起的测量波动,同时其动态跟踪效果好,解决了一般转速测量方法稳定度和实时性不能兼顾的问题。
[1]张明杰,陈凌珊,李伟.一种发动机转速实时在线测试方法的改进[J].上海工程技术大学学报,2012,26(4):335-338.
[2]周正干,李然,李和平,等.高精度数字式转速测量系统的研究[J].测控技术,2000,19(5):60-62.
[3]刘渊,田彦云,张天宏,等.基于μC/OS-III和ARM的空心杯电机控制器设计[J].单片机与嵌入式系统应用,2015,15 (4):51-53.
[4]沈建华.ARM处理器与嵌入式系统[J].单片机与嵌入式系统应用,2010(11):5-7.
[5]陈丽珍,林小薇.嵌入式ARM微处理器选型指南[J].单片机与嵌入式系统应用,2009(6):75-76.
陈飞、罗震(硕士研究生),主要从事航空发动机控制系统设计与仿真;张天宏(教授),研究方向为嵌入式控制系统、系统控制与仿真。
19
[1]ARM.μVision User's Guide[EB/OL].[2016-05].http:// www.keil.com/support/man/docs/uv4/default.htm.
[2]NXP.LPC13-15/16/17/45/46/47 User manual,2012.
[3]ARM.Compiler v5.04 forμVision armlink User Guide[EB/ OL].[201605].http://infocenter.arm.com/help/index. jsp?topic=/com.arm.doc.dui0377e/index.html.
[4]ARM.Getting the Best Optimized Code for your Embedded Application[EB/OL].[2016-05].http://www.keil.com/ appnotes/files/apnt202.pdf.
[5]Jean J Labrosse.嵌入式实时操作系统μC/OS-III应用开发—基于STM32微控制器[M].何小庆,译.北京:北京航空航天大学出版社,2012:111-113.
汪成义(教授),主要从事嵌入式系统、网络技术的研究与教学工作。
Method with High Stability for Measuring Real-time Rotor Speed Based on ARM Platform
Chen Fei,Zhang Tianhong,Luo Zhen
(Jiangsu Province Key Laboratory of Aerospace Power System,College of Energy and Power Engineering, Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
A method with high stability for measuring real-time rotor speed is designed based on ARM,which is suitable for the magnetic rotor speed sensor system.This method can reduce the fluctuation caused by counting error and machining error of the pulse generator which can not be overcome by the traditional rotor speed measuring method.The experiment results show that the designed rotor speed measurement method can reduce the fluctuation of the measurement result.The method is simple to implement,and has good dynamic performance.
high stability;real-time;ARM;magnetic rotor speed sensor system
TP368.1
A
(责任编辑:薛士然2016-04-25)
(责任编辑:薛士然2016-05-05)
