能量回馈型超声波电动机驱动与能量采集电路设计
2016-11-26徐文潭杨斌强王光庆
徐文潭,杨斌强,王光庆
(浙江工商大学,杭州 310018)
能量回馈型超声波电动机驱动与能量采集电路设计
徐文潭,杨斌强,王光庆
(浙江工商大学,杭州 310018)
针对能量回馈型超声波电机既具有精密驱动功能,又具有振动能量采集功能的要求,设计了基于TMS320LF2407的能量回馈型超声波电机驱动与能量采集电路,分析了电路的各个组成模块,并对电路硬件进行了设计与仿真;研制了电路硬件系统,搭建了电路测试平台,对电路进行了测试分析。研究结果表明:设计的驱动电路能够满足超声波电机的驱动要求,能量采集电路具有较好的采集回收功能,为在能量供应不足的场合实现超声波电机的持续应用提供了一种可行的解决方案。
能量回馈型超声波电机;驱动电路;采集电路;仿真与设计
0 引 言
超声波电机的运行机理建立在压电材料的逆压电效应基础之上,其驱动方式与传统电机不同。行波型超声波电机的驱动电路需要产生两路相位差为90°的交变电压,激励压电定子弯曲产生行波,并使定子表面质点以椭圆运动轨迹运动,驱动与之接触的转子作旋转运动[1-3]。但是定子的极化区域中存在未被极化的部分,如图1(a)阴影部分,这些陶瓷不仅不参与能量的转换。在电机定子高频振动过程中还存在着能量的损耗。
本文提出了一种能量回馈型超声波电机,其压电陶瓷极化分区如图1(b)所示,利用正压电效应可以采集压电定子高频振动过程中产生的机械振动能,并将其转换为电能回收利用。相对于常规的超声波电机驱动电路,能量回馈型超声波电机驱动具有以下特点:1) 满足能量回馈型超声波电机驱动要求的同时,也能够驱动常规的超声波电机;2)加入能量采集功能,提高了能源的利用效率。由此可见,能量回馈型超声波电机驱动电路在常规超声波电机驱动电路的基础上加入了能量采集功能,能量利用效率更高,适用范围也更加广泛。
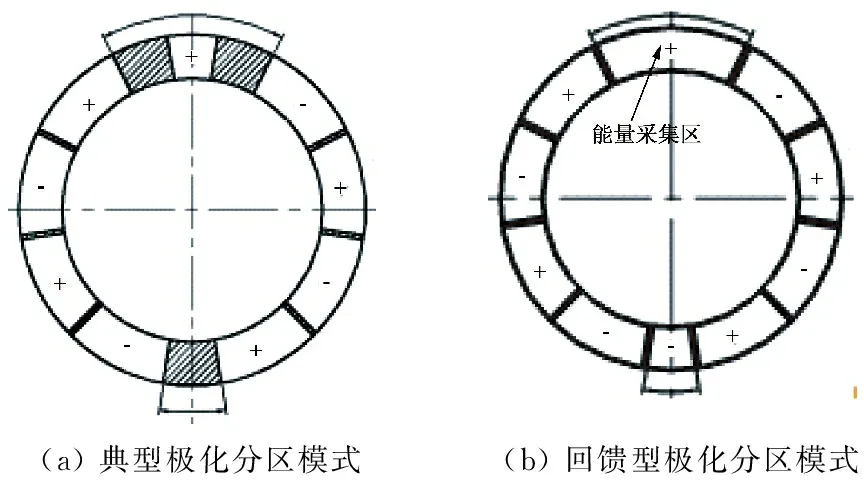
(a)典型极化分区模式(b)回馈型极化分区模式
图1 定子极化区域
本文根据能量回馈型超声波电机的功能要求,设计了一套集驱动与振动能量采集于一体的电机驱动电路,并对电路各个模块进行了设计、分析与仿真,最后通过实验验证本文设计的驱动电路达到了设计要求。
1 驱动电路设计
驱动能量回馈型超声波电机需要输出两路高频电压信号,具有特定的频率、幅值和相位差。为了减小驱动电路模块的体积,选用TI公司的TMS320LF2407A DSP芯片生成驱动超声波电机的4路PWM波形。电路总体结构如图2所示。
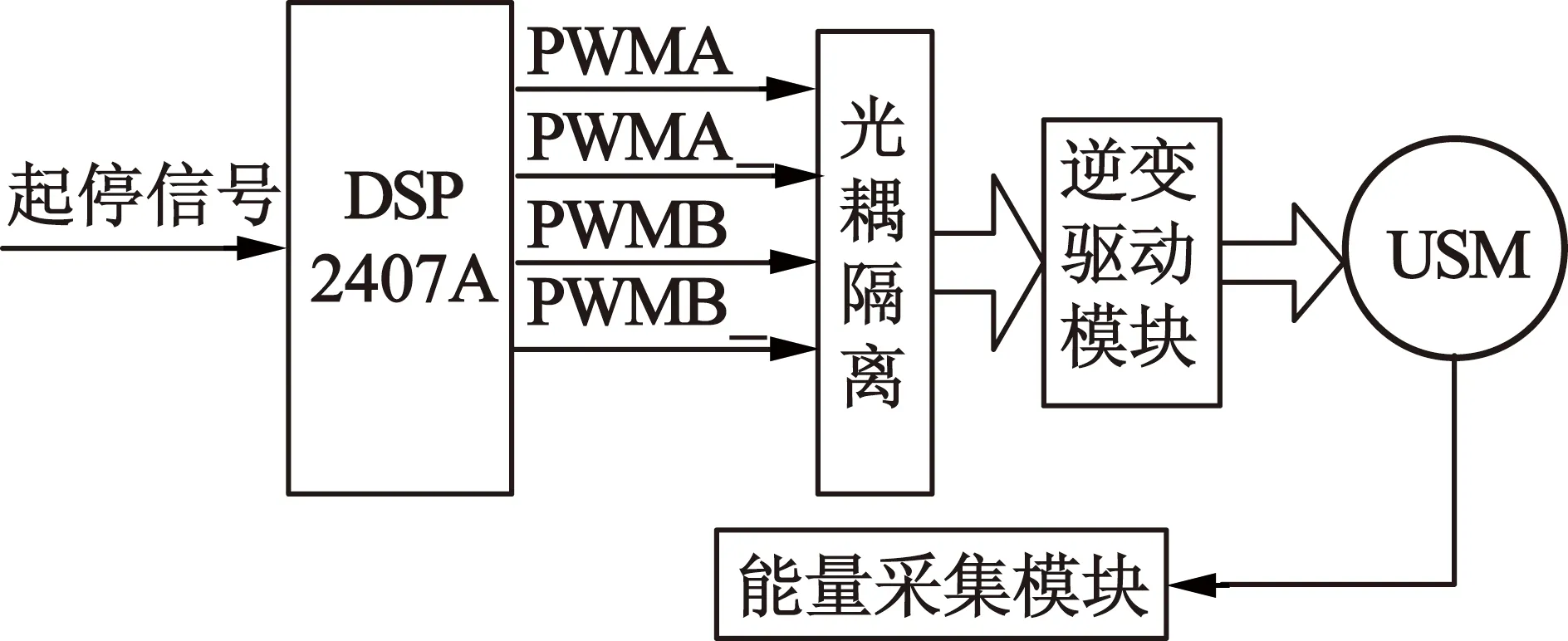
图2 基于DSP的超声波电机驱动电路框图
1.1 PWM生成
TMS320LF2407A芯片中有两个事件管理器模块(EVA、EVB),可以生成3对6路PWM波形[4-5]。本电路只用到其中2对4路PWM波形,在初始化两个事件管理器生成2对4路PWM波时,分别在每个事件管理器中加入一定的延时,调节延时的大小可以改变2对PWM波的相位差;另外若改变波形的占空比以及频率,改变对于控制寄存器的赋值即可实现[6-7]。图3是用TMS320LF2407A生成的相位差90° 2对4路PWM波形。
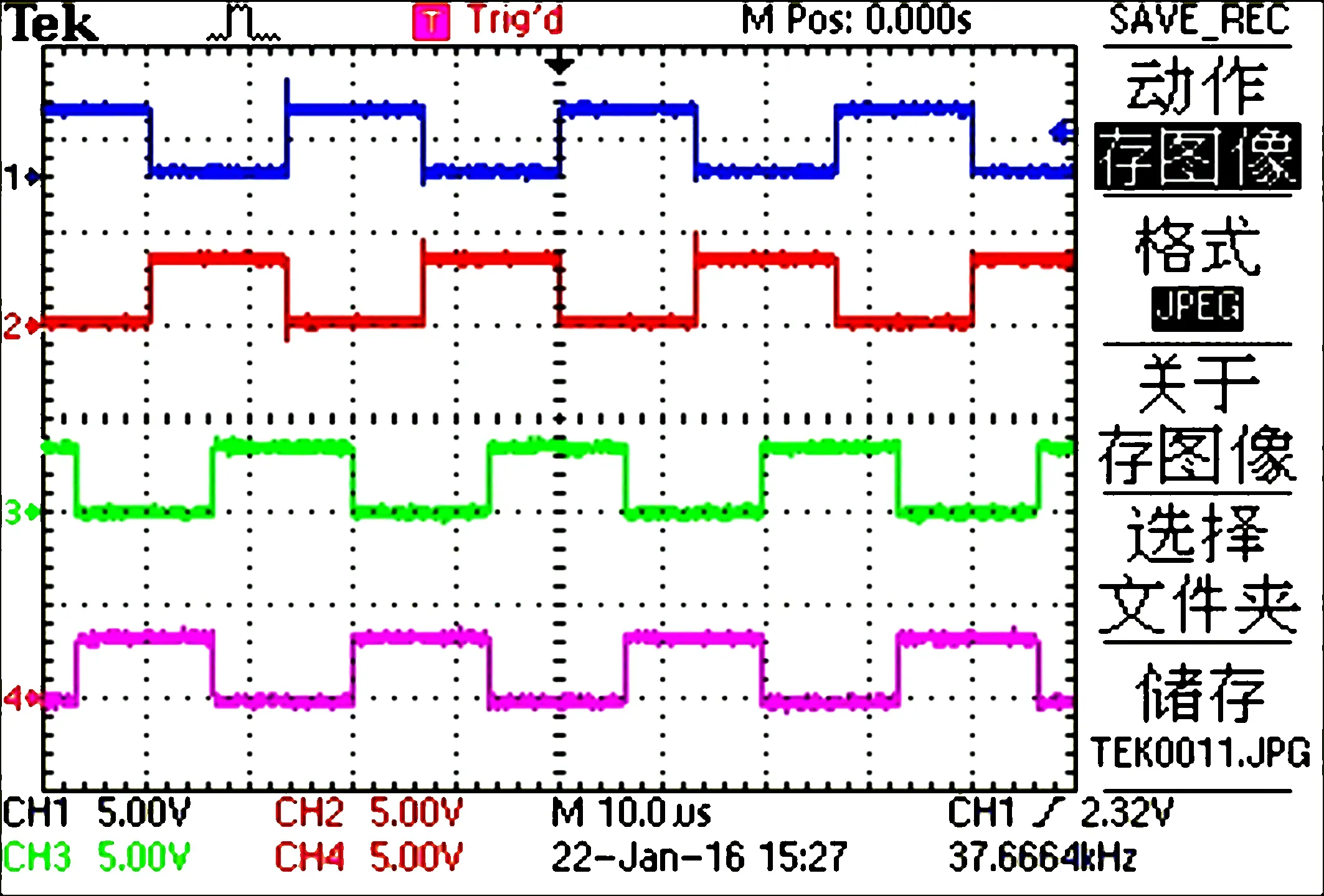
图3 生成的四路PWM波形(截图)
1.2 死区控制
在逆变电路中需要使用功率放大管充当高频开关,将信号发生部分产生的单级性信号变换为双极性功率方波信号,用以推动后面的高频变压器[8]。为了避免出现死区,直接控制光耦隔离模块的输入电压来控制输出MOS管的开关电压,从而达到对死区的控制。
图4中,曲线a,b分别是上拉电阻不同阻值所对应的光耦元件响应曲线,Va,Vb则是其所对应的能够达到的最大电压值,Von是开关功率管的导通电压。由图可知,当改变光耦元件的响应曲线的峰值时,开关功率管的导通时间也会相应的受到影响,从而缩短输入信号所给定的导通时间,形成死区,确保逆变电路的上下桥不会同时打开或者关闭,保证电路稳定运行。

图4 死区控制示意图
1.3 推挽变换电路
超声波电机的驱动需要两路高频高压的电压信号,因此需要将PWM生成模块产生的小信号作放大变换[9]。图5所示为本驱动电路所采用的推挽放大电路。MOSDR1和MOSDR2是两个N型高速MOS驱动管MC34151P,对从光耦器件所输入的信号进行放大,用以推动VQ1~VQ4四个功率场效应管,进而完成整个推挽变换功能。该电路中功率管选用IRF530N,其VDSS为100 V,ID为14 A,RDS(ON)小于0.16 Ω,均满足电路设计要求。
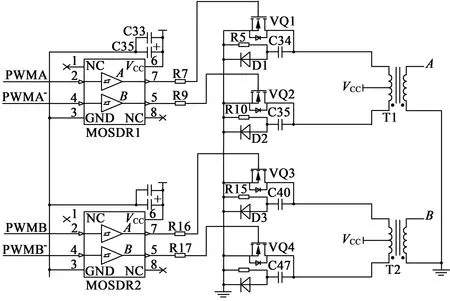
图5 放大推挽变换电路
在开关管导通截止的瞬间,由于变压器漏感的存在,受其影响产生的瞬间尖峰电压将直接加载到开关管上,影响电路的正常工作。为了防止上述情况的出现,需要在开关功率管处加上尖峰电流吸收电路[10]。尖峰吸收电路如图6所示。
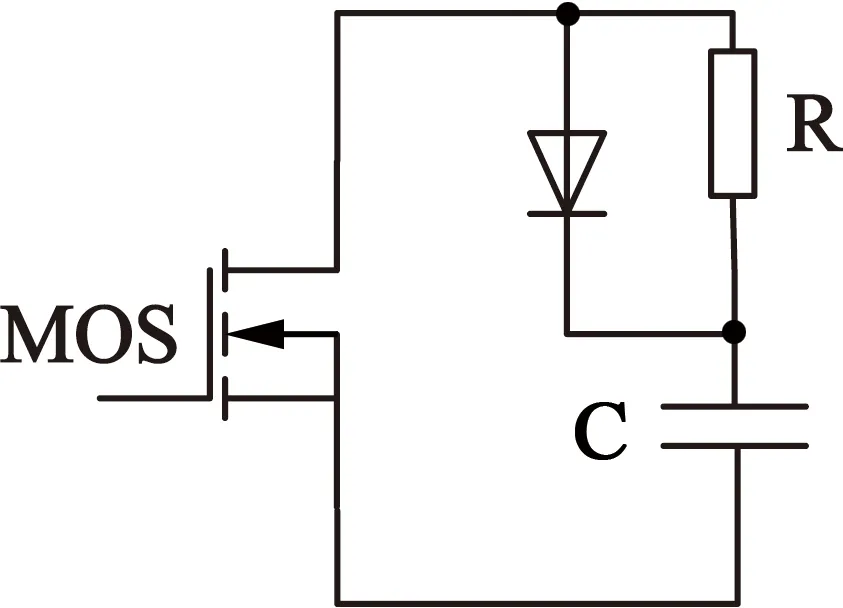
图6 MOSFET单元电路
在开关功率管导通的瞬间,电容中所存储的能量由电阻R经过功率管所形成的回路进行放电。吸收电路各元件的参数根据以下的原则进行选择:
(1)
式中:Ic为漏极电流;tr,tf分别为MOS管上升、下降时间;Ton为开通时间;f为工作频率;Ud为漏极电压;Pr为电阻的功率。
1.4 变压器设计和电感匹配
(1) 变压器磁心的选择
结合电路适用场合和输出功率,选用EE型铁氧体磁心。磁心的尺寸用几何截面积S和窗口有效面积Q表示。对于EE型铁氧体磁心,几何面积S和窗口面积Q可分别由下式确定。
(2)
(3)
式中:Kc为磁心有效窗口利用率;j为导线中平均电流密度。I1和I2分别为原、副边有效电流;U1和U2为原、副边有效电压为;N1和N2为原、副边线圈匝数。则有:
(4)
式中:P2为变压器输出功率;η为变压器转换效率;Kc取0.1~0.5;电流密度j取(3~5)×106A/m2。
(2) 变压器绕组的确定
由式(2)计算出变压器原、副边线圈匝数分别:
(5)
(6)
根据电流的有效值I来确定导线的适用线径,导线截面积Sj由式(6)解出。此外,在选择导线绕制变压器时,要遵循线径小于2倍导线穿透深度的原则[11-12]。
(3) 电感匹配
串联电感匹配能有效地滤除方波中的谐波成份,抑制杂波的干扰。匹配电感L的取值可由下式初步得到:
(7)
式中:Cd,Rm和ωs均可通过阻抗分析仪测量得到。
本电路中所用的超声波电机的电容值为5.6nF,因此计算得到串联匹配电感的电感值为3.03mH,设计的变压器参数为:变压比1:10,原边线径5.1mm,副边线径3.1mm;原边绕线7匝,副边绕线70匝。
1.5 驱动电路测试
电路实测的输出信号如下图所示。图11为不接电机时驱动电路输出波形,为两路经变压器放大的方波。图7为接上Ф60超声波电机,完成电感匹配后运转时所测电机A、B两相输出波形。图8为电路实测搭建的测试平台。

图7 驱动电机的两相波形(截图)

图8 驱动电路实物图
2 能量采集电路
2.1 能量采集电路设计
根据超行波型超声波电机的运行机理可知,其采集输出电压为交流电压,应用场合少且不能直接利用,因此需将其转化为直流电压。Cuk电路依靠电容传递能量,是一种单象限工作的功率变换器[13-14]。本设计中采用图9所示Cuk斩波电路作为能量采集电路的基础模型,结合整流电路实现一定范围可控的AC-DC转换,使反馈端采集的能量得以利用。
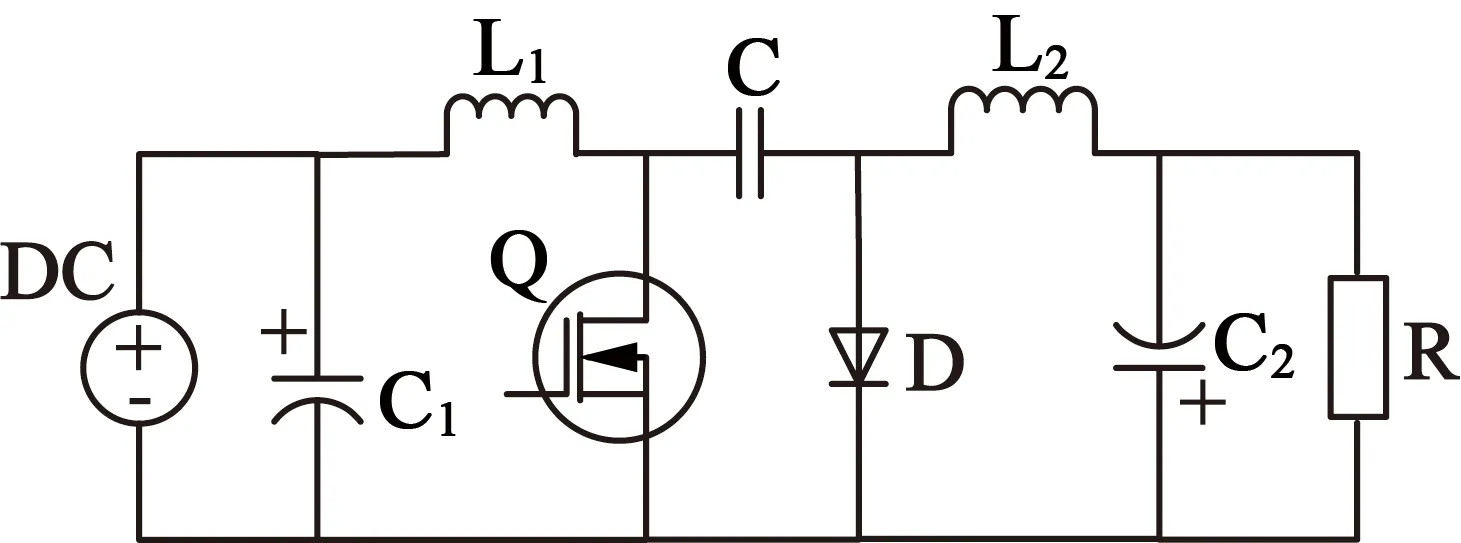
图9 Cuk斩波电路模型
能量采集电路如图10 所示,由变压电路、整流电路、能量传递电路组成。结构简单且运行稳定,满足本设计对能量采集电路的要求。电机运行时,定子中压电材料表面为行波振动,其反馈电压也是正弦交流电压。经过采集电路的整流传递后,通过改变开关信号PWM的输入占空比,实现负载R1两端电压的调节。
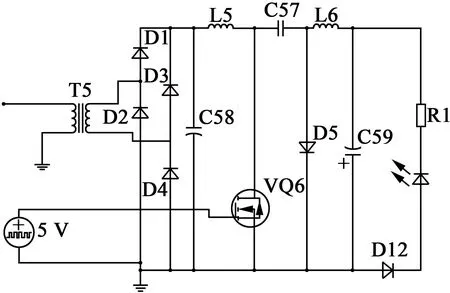
图10 能量采集电路
2.2 采集电路仿真
对图10所示能量采集电路进行仿真分析,仿真参数设置为:feedback端口为正弦采集输出电压输入端,频率为42kHz,电容C57,C58和C59分别为4.7μF,47μF和22μF,电感L5,L6 分别为0.47mH和0.2mH。开关管的开关频率设定为10kHz。仿真分析结果如图11及图12所示。其中图11中上半部分波形为正弦交流电压经变压输出和整流后的电压输出波形。从图11中可见,随着输入正弦电压幅值变化,经单相桥式整流后输出的直流电压幅值亦跟随变化。即超声波电机由于参数和负载变化或者调压控制造成反馈电压变化后,整流输出直流电压波形也将跟随变化。为了保证稳定的负载电压,电路必须能够控制图11中下半部分所示的输出波形,经调整电路中MOS管VQ6的开关信号(即PWM信号)的占空比,其输出电压可以控制在一固定值。图中亦可以看出,在此参数设置下,电路输出电压进入稳态的时间在2ms以内,响应较快。图12中上半部分波形为MOS管的漏源极电压,其最大幅值控制在40V以内。图中下半部分为二极管D5的端压波形。可以看出,当电压正偏时,端压箝位在导通压降值,而当电压反偏时,反偏电压幅值也控制在30V以内。因此可根据仿真结果选取使用的MOS管和快速二极管。
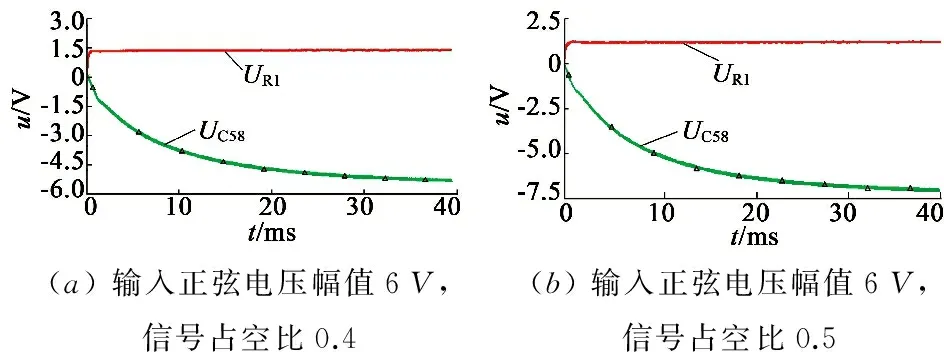
(a)输入正弦电压幅值6V,信号占空比0.4(b)输入正弦电压幅值6V,信号占空比0.5
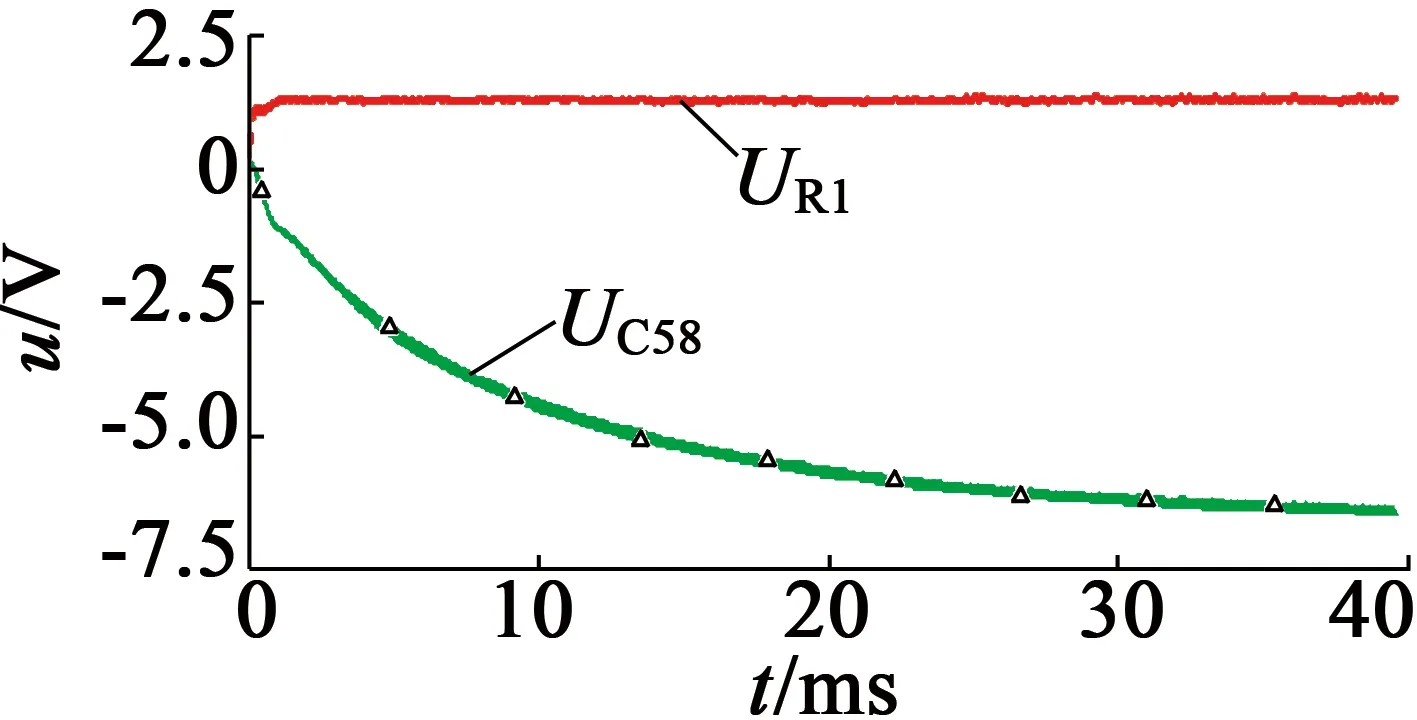
(c) 输入正弦电压幅值6V,信号占空比0.6
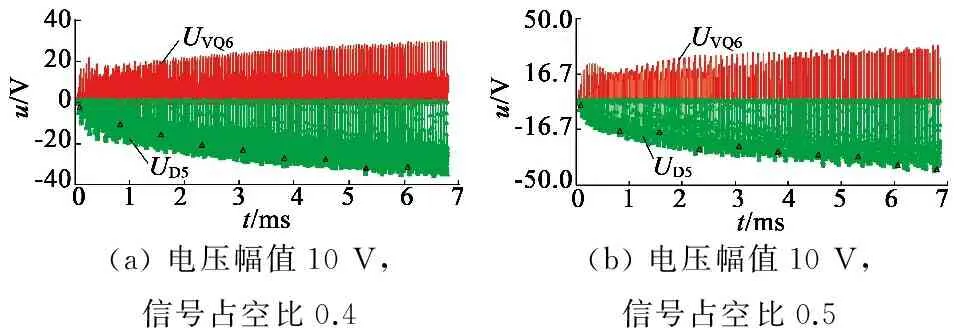
(a)电压幅值10V,信号占空比0.4(b)电压幅值10V,信号占空比0.5

(c) 电压幅值10 V,信号占空比0.6
2.3 能量采集电路测试
根据软件仿真结果,选用IFR530N高速MOS管,IN4007二极管。硬件测试环境如图13所示,能量采集模块的负载串联了LED发光二极管用于显示电路的工作情况。超声波电机运行激励为峰-峰值164 V、频率42 kHz的交流电压,其采集开路(不接负载)时的输出电压如图14所示,采集输出电压峰-峰值达到115 V。
能量采集端输出电压输入Cuk电路,受整流二极管的饱和电压的影响,变压器输入电压波形出现削顶和削底现象,如图15所示。实测电容C57两端电压为5.76 V,改变斩波信号的占空比来调节负载两端的输出电压,其结果如下表所示,可见通过改变斩波信号的占空比来调节能量采集电路的输出电压。
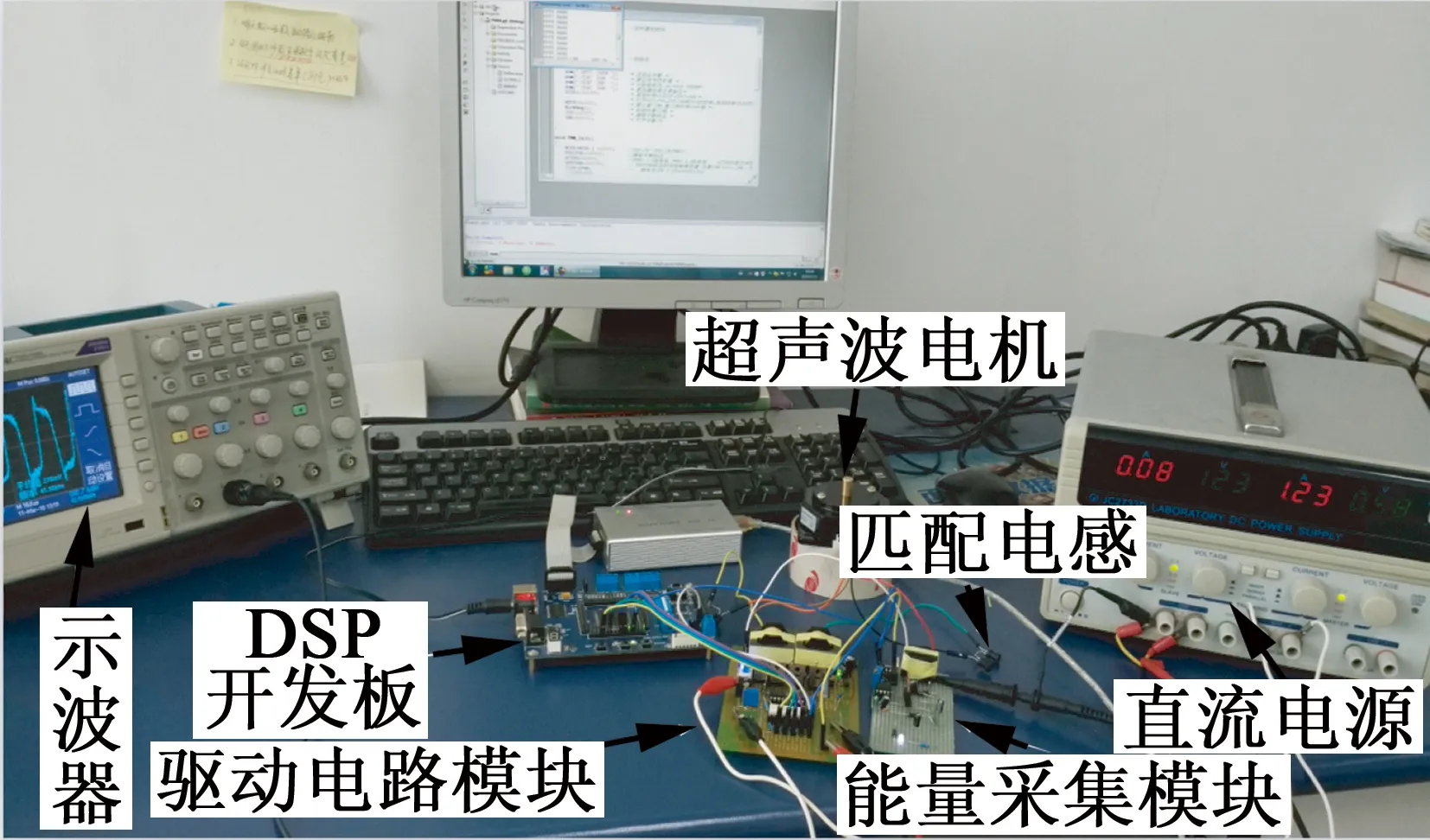
图13 能量采集硬件测试平台
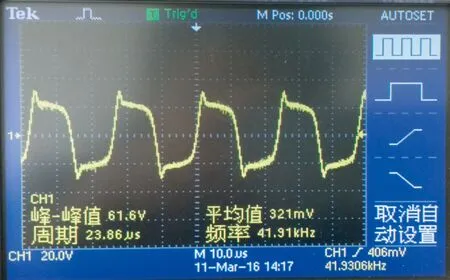
图15 接入Cuk电路时的压电波形

开关信号占空比负载R1两端电压0.63.27V0.53.01V0.42.91V
3 结 语
针对能量回馈型超声波电机的功能要求,设计了基于DSP的电机驱动与能量采集电路,得到以下结论:
1) 基于TMS320LF2407A的驱动电路达到能量回馈型超声波电机的驱动要求。
2) 能量采集电路满足对反馈电压进行采集利用的设计需求,具有较好的能量采集转换效果。改变斩波信号的占空比,可以较好地控制改变能量采集输出电压。
3) 能量回馈型超声波电机符合实际应用的要求,为超声波电机在能量不足场合应用提供一种可行的解决方案。
[1] 胡敏强,金龙,顾菊平.超声波电机原理与设计[M].北京:科学出版社,2005:46-74.
[2] KIM J W,JEONG S S,PARK C H.Design and fabrication of a small ultrasonic motor for precision actuators[J].International Journal of Electrical Engineering,2012,18(4):147-152.
[3] SHI Jingzhuo,ZHAO Fujie,SHEN Xiaoxi,et al.Chaotic operation and chaos control of traveling wave ultrasonic motor[J].Ultrasonics,2013,53(6):1112-1123.[4] 刘和平,严利平,张学锋,等.TMS320LF240xDSP结构原理及应用[M].北京:北京航空航天大学出版社,2002:113-164.
[5] 陈维山,方艳,谢涛.基于DSP的行波型超声波电机的驱动与控制[J].机械工程师,2005(8):40-42.
[6] 赵先锋,文贵印,张志铭.基于TMS320LF2407A的超声波电机驱动控制[J].液晶与显示,2005,38(5):95-97.
[7] 贺冠华,史敬灼.超声波电机驱动控制的DSP软件实现[J].电机技术,2007(2):24-27.
[8] 陈永校,郭吉丰.超声波电动机[M].杭州:浙江大学出版社,1994:158-181.
[9] 王波,郭吉丰.采用超声波电机的空间飞网自适应收口机构设计[J].宇航学报,2013,34(3):308-313.
[10] 赵淳生.超声波电机技术与应用[M].北京:科学出版社,2007:436-449.
[11] 王文浩,王光庆,郭吉丰.行波型超声波电动机的PWM控制驱动电源[J].微特电机,2007,35(2):32-34.
[12] 贺映光,任小洪,方刚,等.单相PWM逆变器输出滤波器优化设计[J].电气传动,2010,40(11):33-35.
[13]BABAEIE,MAHMOODIEHMES.SystematicalmethodofdesigningtheelementsoftheCukconverter[J].ElectricalPowerandEnergySystems,2014,55(2):351-361.
[14]UMAMSHESWARIMG,UMAGU.AnalysisanddesignofreducedorderlinearquadraticregulatorcontrolforthreephasepowerfactorcorrectionusingCukrectifiers[J].ElectricPowerSystemsResearch,2013,96:1-8.
Driving and Energy Harvesting Circuits for an Energy Harvesting Type Ultrasonic Motor
XUWen-tan,YANGBin-qiang,WANGGuang-qing
(Zhejiang Gongshang University,Hangzhou 310018,China)
In order to match the demands of precision actuating and energy harvesting functions of the energy harvesting type ultrasonic motor, a driving circuit and an energy harvesting circuit were designed based on the TMS320LF2407 in this paper. The components of the whole circuit were introduced and designed, some simulations were carried out to analyze the circuit performance, and the experimental setup was established to test the whole circuit. The research results show that the driving circuit can math the driving demands of the ultrasonic motor. The energy harvesting circuit has a high efficiency to convert vibration energy into electric energy. The driving circuit is contributed to solve the energy shortage in the occasion of the ultrasonic motor applied.
energy harvesting type ultrasonic motor; driving circuit; energy harvesting circuit; simulation and design
2016-03-22
国家自然科学基金项目(51277165);浙江省自然科学基金项目(LF15Y0001)
TM359.9
A
1004-7018(2016)08-0082-04
徐文潭(1993-),男,硕士研究生,主要研究方向为超声波电机驱动控制技术。