JPC—2型耕层断面测绘仪的研制
2016-11-25杨存志吴泽全陈蕾
杨存志 吴泽全 陈蕾
摘要:为提高深松机和深松整地联合作业机的鉴定检测效率,研制基于WIFI无线测控和激光测距技术的JPC-2型耕层断面测绘仪。阐述耕层断面测绘仪的工作原理、设计思路及参数设定,介绍测试参数的设置及测定方法,为降低鉴定人员的劳动强度提供适用机具。
关键词:深松机;耕层断面;激光测距;WIFI无线测控
中图分类号:S220.39 文献标识码:A 文章编号:1674-1161(2016)07-0036-04
深松机是一种与大功率拖拉机配套使用的耕作机械,主要用于行间或全方位深层土壤机械化翻整。深松机作业有利于改善土壤耕层结构,打破犁底层,提高土壤蓄水保墒能力。启动深松机时,深松铲靠自重逐渐进入土壤预定深度,作业过程中应保持作业深度,不允许进行各项调整。
深松机的设计与生产必须达到DG/T 026-2012《深松机推广鉴定大纲》关于土壤膨松度与土壤扰动系数的检测要求。采用手持式激光测距仪人工测量这2个参数时,常见的工作幅宽2.5 m的深松整地联合作业机,需沿水平尺在工作幅宽范围内每间隔30 mm连续等分标记测点,每个行程需测量耕前地表、耕后地表和实际深松沟底线至水平基准线的距离,且要分别测量3个行程,总测量次数不少于750次。此后,需要人工对数据进行计算,劳动强度大且测量精度低。为此,根据农机鉴定部门的实际要求,研制了基于WIFI无线测控和激光测距技术的JPC-2型耕层断面测绘仪。
1 JPC-2型耕层断面测绘仪测试方法
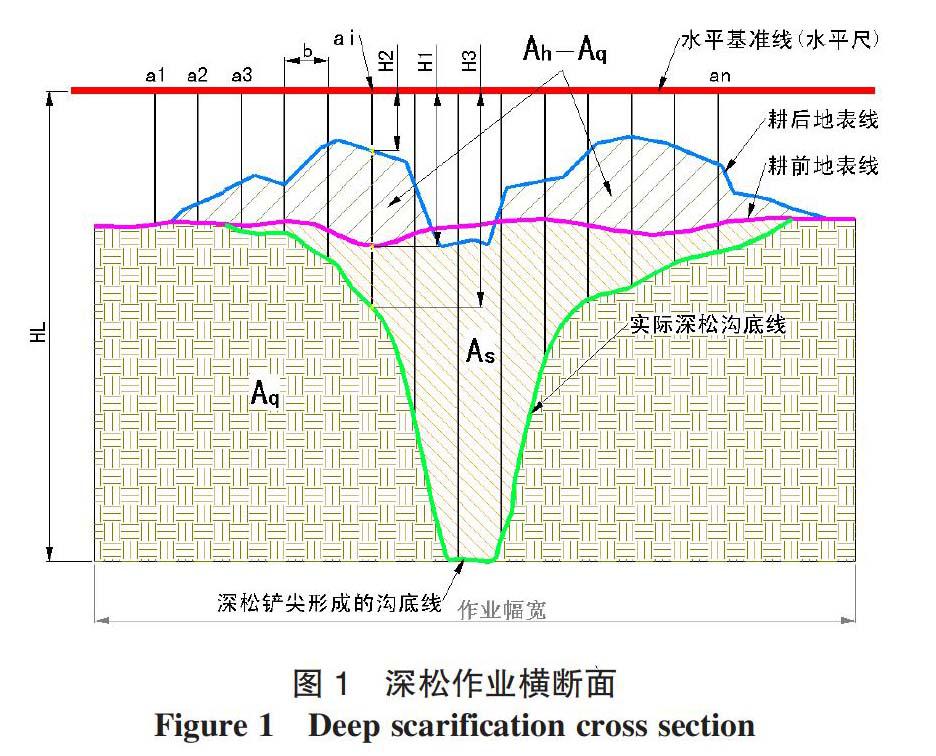
JPC-2型耕层断面测绘仪采用水平基准线法。深松作业前,垂直机具作业方向横跨工作幅宽距地表适当高度建立水平尺(水平基准线)并调水平(见图1),沿水平尺在整个工作幅宽范围间隔30 mm(或<30 mm)连续等分测点,在作业前、后,测定各等分测点耕前地表至水平基准线的距离H1、耕后地表至水平基准线的距离H2、实际深松沟底线至水平基准线的距离H3。H1,H2,H3为测量采集的3组基础数据,基此建立3组导出数据,分别为a(h-q)i=H1-H2,aqi=HL-H1,asi=H3-H1,记入记录表。按相关公式计算土壤膨松度和土壤扰动系数。每个行程测定1次,共测定3个行程,结果取平均值。
2 JPC-2型耕层断面测绘仪结构设计
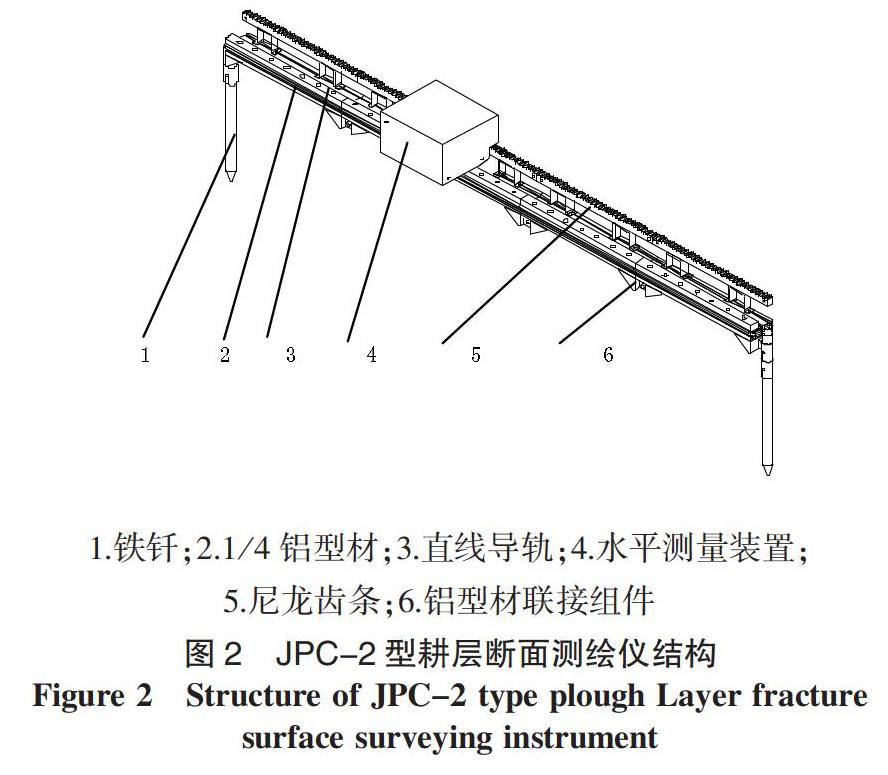
JPC-2型耕层断面测绘仪有效行程4 m。为便于运输,由4段铝型材联接而成,工作幅宽小的深松机也可以3段联接,有效行程达3 m。
如图2所示,测绘前,将四段架体组装成完整的耕层断面测绘仪,架体之间的导轨与齿条接缝处对齐,无上下、左右错位现象。把2根铁钎牢固钉进土中,用夹箍调节测绘仪的高低和水平。4 m长的架体因为不是整根梁,会出现挠度。重复性试验数据表明,组装完成的测绘仪测量过程中的挠度几乎不变。
测绘时,水平测量装置在步进电机驱动下,齿轮与齿条啮合,沿直线导轨水平移动,测量速度为60 mm/s,回程速度为120 mm/s。
2.1 挠度计算
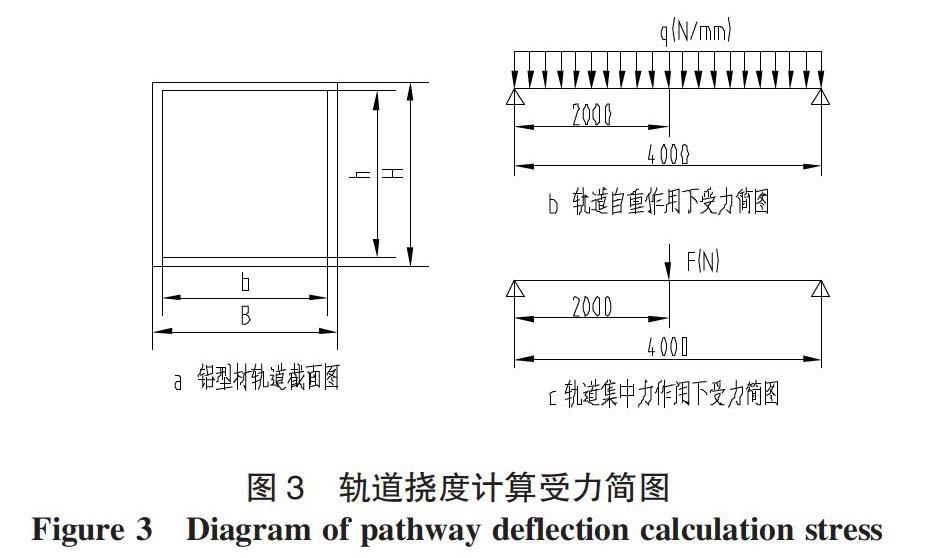
耕层断面测绘仪两端架在铁钎上使用,当行程达到4 m时,假设4段连接轨道刚度与整段轨道相似,轨道自重和水平测量装置质量会产生挠度。现对铝型材中心的处最大挠度进行计算,轨道受力如图2所示。
2.1.1 轨道自重下的最大挠度 如图3中的a,b所示,轨道截面为60 mm×60 mm ×3 mm的铝方管,q为单位距离下重力。根据材料力学得到平均载荷下最大挠度计算公式为:
Ymax1=5qL4/384EI (1)
式中:Ymax1为最大挠度,mm;q为重力,N/mm;L为轨道长度,mm(下同);E为材料弹性模量,N/mm2(下同);I为型材惯性矩,mm4(下同)。
其中:q=1.85×9.8×10-3=18.1×10-3(N/mm);L=
4 000 mm;E=69 000 N/mm2。
根据图3a的轨道截面尺寸得型材惯性矩:I=(BH3-bh3)/12=(60×603-54×543)/12=371 412(mm4)。
将上述数值代入式(1)得:Ymax1=(5×18.1×10-3×
40 004)/(384×69 000×371 412)=23.17×1012/9.84×
1 012=2.35(mm)。
2.1.2 集中力作用下的最大挠度 如图3中的c所示,集中力F为水平测量装置的重力,装置质量为4 kg。根据材料力学得集中力载荷下最大挠度公式:
Ymax2=FL3/48EI (2)
其中F=mg=4×9.8=39.2(N)。将数据代入式(2)得:Ymax2=(4×9.8×4 0003)/(48×69 000×371 412)=25.08×1011/12.3×1011=2.03(mm)。
2.1.3 系统最大挠度 系统最大挠度为:Ymax1+Ymax2=4.38(mm)。
2.2 测控系统
测控系统的工作原理见图4。
如图5所示,水平测量装置集成步进电机、控制器、激光测距传感器、嵌入式主板、WIFI发射接收模块和行程开关。其显著优点有:一是缩短激光测距传感器采集数据的传输距离,保证数据信号不受干扰,提高准确度;二是采用WIFI无线方式与上位机通讯,减少繁多的数据线与电源线,与外界进行有线连接只需一根电源线。
3.3 主要技术参数
耕层断面测绘仪的主要技术参数见表1。
3 检测软件应用
检测软件主界面见图6。
3.1 无线连接
1) 确保上位机(笔记本电脑)无线Wifi处于开启状态,将其IP地址设置为自动获取。
2) 水平测量装置上电后,内置的无线AP打开,主机可搜索到名为“NJY-DATA01”的无线网络连接;连接该无线AP。
3) 连接状态显示为 。
3.2 开始检测
3.2.1 设定检测对象 在主界面上点击H1按键,设定当前检测对象为:测定耕前地表至水平基准线距离H1;在主界面上点击H2按键,设定当前检测对象为:耕后地表至水平基准线距离H2;在主界面上点击H3按键,设定当前检测对象为:实际深松沟底线至水平基准线距离H3。
3.2.2 测量 在主界面上,点击“开始测试”按键,步进电机首先执行复位行程,然后按选定速度从左向右行进,同时采集距离数据。当行至右端的行程开关处或者点击“停止测试”按键,电机停止,一组数据采集结束。通过切换H1,H2,H3,完成耕前地表、耕后地表和实际深松沟底线的3组距离数据检测。通过切换行程1、行程2、行程3,进行3个选定位置的测量。
3.3 测试结果分析
当H1,H2,H3等3组测试完成后,系统将自动根据采集到的数据计算统计深松性能指标。检测结果分析表格见图7。
点击H1,H2,H3按键,显示或隐藏对应的数据组曲线;点击“设置H1,H2,H3”按键,可分别设置H1,H2,H3的起点与终点:点击“等分点“或”始未点“,打开等分点和始末点设置窗口,设置适当的“水平基准线等分点间距”“测量的起始点和结束点”“深松铲数量”“最深沟底偏差”。点击“确定”按键后,软件将以设定的数值重新生成对应的测试结果报告。计算参数设定界面见图8。
软件系统根据“深松铲数量”和“最深沟底偏差”数值定位数据曲线中的深松沟底,并在数据曲线图上显示黑色的辅助线来标识沟底位置。其计算逻辑为:软件系统首先遍历H3数据组,计算出最深沟底,最深沟底与“最深沟底偏差”的差值即为横向标识线位置,通过该横向标识线与H3数据曲线的一系列交点来定位各个深松铲的沟底。当“深松铲数量”等于0时,测试结果报表中的深松铲个数等于定位到的沟底个数,HL等于各个沟底的平均值;当“深松铲数量”大于0时,测试结果报表中的深松铲个数等于该“深松铲数量”,HL等于该个数的沟底的平均值。
检测结果分析表格中,土壤膨松度与土壤扰动系数的计算数据,可为鉴定部门判断机具是否符合国家标准提供可靠依据。
检测数据可以保存、重新导入、查看、设置检测信息及报表打印输出。
4 结论
JPC-2型耕层断面测绘仪可以横跨机具作业宽度,自动精确测量耕前地表、耕后地表和实际深松沟底线至水平基准线的距离,自动进行数据(土壤膨松度与土壤扰动系数)计算、保存、表格绘制,以及后期数据输出与打印。
JPC-2型耕层断面测绘仪的研制成功,为国内农机鉴定部门进行深松机鉴定提供了快速、准确的检测方式,极大减轻了鉴定人员采集数据的劳动强度,提高了工作效率。
参考文献
[1] 郑俊,朱云,郭斌.深松机旋耕深松起垄的性能分析实验[J].湖南农机,2014(1):45-47.
[2] 糜南宏,王景阳.旋耕机及深松机产品鉴定检测的技术探讨[J].江苏农机化,2012(3):36-37.
[3] 盛宏达,李国龙,陈治文.旋耕深松灭茬起垄机在检测中发现的问题[J].农业机械,2011(11):110.
